You might also like
- How Brushless Motors Work (BLDC Motors)Document41 pagesHow Brushless Motors Work (BLDC Motors)Chandrashekar ReddyNo ratings yet
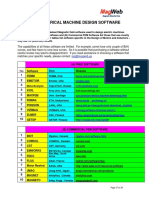
- Design Software 1Document2 pagesDesign Software 1anbarasuval84No ratings yet
- BLDC MotorDocument46 pagesBLDC MotorShafira AuliaNo ratings yet
- ML4425 Sensor Less BLDC Motor ControllerDocument17 pagesML4425 Sensor Less BLDC Motor Controllerfrazier8553No ratings yet
- BLDC DriverDocument8 pagesBLDC DriverRich ManNo ratings yet
- PIC-EK User Manual PDFDocument91 pagesPIC-EK User Manual PDFDjura CurugNo ratings yet
- How To Make Sodium PerchlorateDocument17 pagesHow To Make Sodium PerchlorateKing90No ratings yet
- ZRP Catalog 2019 PDFDocument68 pagesZRP Catalog 2019 PDFMichaelNo ratings yet
- of BLDCDocument45 pagesof BLDCsmhbNo ratings yet
- BLDC Product GuideDocument36 pagesBLDC Product GuidemjtbbhrmNo ratings yet
- Design of Quarter-Wave Compact Impedance Transformers Using Coupled Transmission LinesDocument1 pageDesign of Quarter-Wave Compact Impedance Transformers Using Coupled Transmission LinesBruno Koch SchmittNo ratings yet
- Speed Control For BLDC Using Pid AlgorithmDocument14 pagesSpeed Control For BLDC Using Pid Algorithmtoufani95No ratings yet
- 2 KM FM TransmitterDocument1 page2 KM FM TransmitterradianfmNo ratings yet
- BLDCDocument4 pagesBLDCsathishNo ratings yet
- RF Controlled ApplianceDocument14 pagesRF Controlled ApplianceNEX456No ratings yet
- Design and Development of Three Phase Permanent Magnet BrushlessDocument11 pagesDesign and Development of Three Phase Permanent Magnet BrushlessteomondoNo ratings yet
- Permanent Magnet MotorsDocument36 pagesPermanent Magnet MotorskkarthiksNo ratings yet
- BLDCDocument4 pagesBLDCmechtex Pvt LtdNo ratings yet
- Exp 9 Boost ConverterDocument8 pagesExp 9 Boost ConverterusmpowerlabNo ratings yet
- ZVS Full BridgeDocument20 pagesZVS Full Bridgejameschall1No ratings yet
- Speed Control of BLDC MotorDocument5 pagesSpeed Control of BLDC Motorgourav kakhaniNo ratings yet
- Stepper Motor Drive For Robotic ApplicationsDocument11 pagesStepper Motor Drive For Robotic ApplicationsPrerith Subramanya100% (2)
- RF Based Pick-And-place-robot Use ZigbeeDocument66 pagesRF Based Pick-And-place-robot Use Zigbeesumit_saNo ratings yet
- 2.review of Literature and Statement of ProblemDocument6 pages2.review of Literature and Statement of ProblemsheriabhiNo ratings yet
- Application of Brushless DC Motor in MilitaryDocument10 pagesApplication of Brushless DC Motor in Militarymighty_heart100% (1)
- BLDC SimulationDocument4 pagesBLDC SimulationSiva GuruNo ratings yet
- SPWM V/HZ InverterDocument51 pagesSPWM V/HZ InverterLabi BajracharyaNo ratings yet
- Sensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationDocument7 pagesSensorless Speed Control of Brushless DC Motor With Fuzzy Based EstimationPhạm Văn TưởngNo ratings yet
- EE2203-Electronic Device and Circuits Question BankDocument11 pagesEE2203-Electronic Device and Circuits Question BankAnbarasan Annamalai100% (1)
- Arduino Based Sensorless Speed Control of BLDC Motor Using GSMDocument6 pagesArduino Based Sensorless Speed Control of BLDC Motor Using GSMRaja Ramesh DNo ratings yet
- Bistable MultivibratorsDocument9 pagesBistable MultivibratorsihtishamuddNo ratings yet
- 25839-Designing Offline Ac DC Switching Power Supplies Brick by Brick PDFDocument9 pages25839-Designing Offline Ac DC Switching Power Supplies Brick by Brick PDFAshwin KonaleNo ratings yet
- Servo Motor & D.C Motor Interfacing With Atmega32Document33 pagesServo Motor & D.C Motor Interfacing With Atmega32Yash TripathiNo ratings yet
- Stepper Color CodeDocument6 pagesStepper Color CodeSanjay PanditNo ratings yet
- DCpower SuplyDocument12 pagesDCpower Suplymm30973097No ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Mo at Source PDFDocument2 pagesMo at Source PDFcavcicNo ratings yet
- 10kW All-In-One The Hybrid Inverter User Manual: Important NoticeDocument54 pages10kW All-In-One The Hybrid Inverter User Manual: Important NoticeAbdulrehman SoomroNo ratings yet
- MotorsDocument18 pagesMotorsAmado CamachoNo ratings yet
- Cell Phone DetectorDocument51 pagesCell Phone DetectorAnonymous L9fB0XU0% (1)
- AM Directional Antenna Patterns by Carl E. Smith, January, 1958.Document276 pagesAM Directional Antenna Patterns by Carl E. Smith, January, 1958.Bob Laughlin, KWØRL100% (2)
- Lipo Battery PacksDocument7 pagesLipo Battery PacksDoranNo ratings yet
- BLDC 3-Phase MotorDocument3 pagesBLDC 3-Phase MotordonatocaNo ratings yet
- Rewinding A Brushless MotorDocument10 pagesRewinding A Brushless MotorUday WankarNo ratings yet
- Thermal Design and Analysis of An Air Cooled X-Band Active Phased Array Antenna-IRSI 17-004Document5 pagesThermal Design and Analysis of An Air Cooled X-Band Active Phased Array Antenna-IRSI 17-004Swadish KashyupNo ratings yet
- Interesting CircuitsDocument33 pagesInteresting CircuitsdinhnhanNo ratings yet
- Control of BLDC MotorDocument55 pagesControl of BLDC MotorankitNo ratings yet
- SC Diy Tci TriggerDocument15 pagesSC Diy Tci TriggerElias CoronelNo ratings yet
- Magnetic LevitationDocument19 pagesMagnetic LevitationJayDon100% (1)
- Miniature Piezoelectric Mobile Robot Driven by StandingWaveDocument6 pagesMiniature Piezoelectric Mobile Robot Driven by StandingWaveHassan HaririNo ratings yet
- Max Thrust Provided by Iron Man's SuitDocument3 pagesMax Thrust Provided by Iron Man's SuitUtsav BansalNo ratings yet
- LVDTDocument8 pagesLVDTAnirban GhoshNo ratings yet
- 1 Electrical - and - Electronics - Measurment. McGraw Hill, 2013-413-651Document239 pages1 Electrical - and - Electronics - Measurment. McGraw Hill, 2013-413-651Andrea Acuña100% (1)
- Concise Manual of ElectricityDocument130 pagesConcise Manual of ElectricityBách HợpNo ratings yet
- HV Cable Test Report 1Document3 pagesHV Cable Test Report 1prabhumanoc100% (1)
- Victor VC830L ManualDocument3 pagesVictor VC830L ManualSidney Sant'Anna LeiteNo ratings yet
- Power Electronics - QB - Final - PECDocument52 pagesPower Electronics - QB - Final - PECmanoj kumarNo ratings yet
- LR25 Catalog Telemecanique LR2 Overload Relay Cross-RefDocument2 pagesLR25 Catalog Telemecanique LR2 Overload Relay Cross-RefShawn PhillipsNo ratings yet
- Electrolytic Capacitor DatasheetDocument2 pagesElectrolytic Capacitor DatasheetSwasthika LoganathanNo ratings yet
- Automatic Change-Over SwitchDocument7 pagesAutomatic Change-Over SwitchFaizan NazirNo ratings yet
- 75 CC 88Document7 pages75 CC 88Briliant ImronNo ratings yet
- CPE400 Lab8 ARCONADO DEVELLES 2 PDFDocument10 pagesCPE400 Lab8 ARCONADO DEVELLES 2 PDFKimNo ratings yet
- Sla4031 PDFDocument1 pageSla4031 PDFraveendraNo ratings yet
- Lab Experiment N 2, Diode Applications RectifiersDocument18 pagesLab Experiment N 2, Diode Applications RectifiersSeif-El-Islam BayNo ratings yet
- Multiple Choice QuestionsDocument39 pagesMultiple Choice QuestionsSunil Gadekar80% (20)
- Standard Power MOSFET: IRFP 254 V 250 V I 23 A R 0.14Document2 pagesStandard Power MOSFET: IRFP 254 V 250 V I 23 A R 0.14Fran Javi Vila DiazNo ratings yet
- EI2301-IE - Unit 1 - Part A and Part B - With Answers PDFDocument21 pagesEI2301-IE - Unit 1 - Part A and Part B - With Answers PDFsartpgitNo ratings yet
- Protecting Transmission Lines Terminated Into Transformers: Elmo Price and Roger Hedding, ABB IncDocument12 pagesProtecting Transmission Lines Terminated Into Transformers: Elmo Price and Roger Hedding, ABB IncproteccionesNo ratings yet
- Manual - GT1-3K-SS - LivoltekDocument52 pagesManual - GT1-3K-SS - LivoltekPatrick FerreiraNo ratings yet
- Block Diagram PDFDocument1 pageBlock Diagram PDFТатьяна ГарецNo ratings yet
- M0097147M0097147-00 SisDocument8 pagesM0097147M0097147-00 SisNicole SmithNo ratings yet
- Domestic Electrical WiringDocument4 pagesDomestic Electrical WiringSyed Showkath AliNo ratings yet
- 2391 Revision 2000 V6.0Document118 pages2391 Revision 2000 V6.0mpendleton100% (1)
- All BΩSS Pricing Guide (MS.DI.PG.01-0317) PDFDocument40 pagesAll BΩSS Pricing Guide (MS.DI.PG.01-0317) PDFMuhammad Wandiex0% (1)
- c37 11-1997 Ieee Standard Requirements For Electrical Control For High-Voltage Circuit Breakers Rated On A Symmetrical Current BasisDocument19 pagesc37 11-1997 Ieee Standard Requirements For Electrical Control For High-Voltage Circuit Breakers Rated On A Symmetrical Current BasisJavier SanchezNo ratings yet
- Accell AL Series Spec Sheet Dimmer Cooper Mlv-600vaDocument5 pagesAccell AL Series Spec Sheet Dimmer Cooper Mlv-600vawilpizarroNo ratings yet
- 1S27 - Arc Flash RelayDocument23 pages1S27 - Arc Flash RelayPaddyNo ratings yet
- SACI-Current Transformers PDFDocument34 pagesSACI-Current Transformers PDFshrikanth5singhNo ratings yet
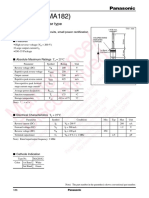
- MA182Document3 pagesMA182RegaNo ratings yet
- Control Nivel FinderDocument12 pagesControl Nivel FinderOscar DuranNo ratings yet
- SC PDFDocument22 pagesSC PDFRached DouahchuaNo ratings yet
- Sylvania Mariner II Series Commercial Pendant Spec Sheet 1970Document2 pagesSylvania Mariner II Series Commercial Pendant Spec Sheet 1970Alan MastersNo ratings yet
- TD Esc 02 de en 13 011 Rev005 List of Limit Values For E 101, E 115Document20 pagesTD Esc 02 de en 13 011 Rev005 List of Limit Values For E 101, E 115Felipe SilvaNo ratings yet