You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- HSK Vocabulary Flashcard Level 1 PDFDocument7 pagesHSK Vocabulary Flashcard Level 1 PDFmbodlaNo ratings yet
- HSK Vocabulary Flashcard Level 5FDocument7 pagesHSK Vocabulary Flashcard Level 5FmbodlaNo ratings yet
- Lì Liang Lì Fāng Lì Jí: HSK Vocab ReviewDocument7 pagesLì Liang Lì Fāng Lì Jí: HSK Vocab ReviewmbodlaNo ratings yet
- Lì Liang Lì Fāng Lì Jí: HSK Vocab ReviewDocument7 pagesLì Liang Lì Fāng Lì Jí: HSK Vocab ReviewmbodlaNo ratings yet
- Zhěn Duàn Zhěn Tou Zhèn Zhèn Dòng: HSK Vocab ReviewDocument5 pagesZhěn Duàn Zhěn Tou Zhèn Zhèn Dòng: HSK Vocab ReviewmbodlaNo ratings yet
- Lì Liang Lì Fāng Lì Jí: HSK Vocab ReviewDocument7 pagesLì Liang Lì Fāng Lì Jí: HSK Vocab ReviewmbodlaNo ratings yet
- HSK Vocabulary Flashcard Level 5HDocument7 pagesHSK Vocabulary Flashcard Level 5HmbodlaNo ratings yet
- Shuō Fú Sī Chóu Sī Háo: HSK Vocab ReviewDocument8 pagesShuō Fú Sī Chóu Sī Háo: HSK Vocab ReviewmbodlaNo ratings yet
- HSK Vocabulary Flashcard Level 5D PDFDocument7 pagesHSK Vocabulary Flashcard Level 5D PDFmbodlaNo ratings yet
- Lì Liang Lì Fāng Lì Jí: HSK Vocab ReviewDocument7 pagesLì Liang Lì Fāng Lì Jí: HSK Vocab ReviewmbodlaNo ratings yet
- HSK Vocab Review: Level 5 - Word 151 300Document7 pagesHSK Vocab Review: Level 5 - Word 151 300mbodlaNo ratings yet
- Gǎi Shàn Gǎi Zhèng Gài Gài Kuò Gài Niàn: HSK Vocab ReviewDocument8 pagesGǎi Shàn Gǎi Zhèng Gài Gài Kuò Gài Niàn: HSK Vocab ReviewmbodlaNo ratings yet
- HSK Vocab Review: Level 5 - Word 1 150Document8 pagesHSK Vocab Review: Level 5 - Word 1 150mbodlaNo ratings yet
- Prefixes Suffixes RootsDocument10 pagesPrefixes Suffixes Rootsjordy745No ratings yet
- Liabliity-Form Updated For EME MukshpuriDocument1 pageLiabliity-Form Updated For EME MukshpurimbodlaNo ratings yet
- MSC FormDocument4 pagesMSC FormmbodlaNo ratings yet
- Few Core Concepts For OHT2Document2 pagesFew Core Concepts For OHT2mbodlaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Interpreting The Venus CycleDocument2 pagesInterpreting The Venus Cyclemurx2100% (1)
- Dramix: Dramix Economic Concrete Reinforcement For Safe Floors On PilesDocument9 pagesDramix: Dramix Economic Concrete Reinforcement For Safe Floors On PilesMohammad IqbalNo ratings yet
- Comparing Registers: MIPS vs. ARM AssemblyDocument12 pagesComparing Registers: MIPS vs. ARM Assemblyshruti chouhanNo ratings yet
- Elasticity and Damping of Avm-2055 Rubber Mounting Pads: Theoretical Determination and Experimental VerificationDocument7 pagesElasticity and Damping of Avm-2055 Rubber Mounting Pads: Theoretical Determination and Experimental VerificationAnanya MishraNo ratings yet
- Proc.-02 GTAW - PAWDocument37 pagesProc.-02 GTAW - PAWRaghu vamshiNo ratings yet
- Equinoxes and Solstices: UttarayanamDocument2 pagesEquinoxes and Solstices: UttarayanamRahul SharmaNo ratings yet
- DLL - English 5 - Q3 - W8Document8 pagesDLL - English 5 - Q3 - W8Merlyn S. Al-osNo ratings yet
- CP2405 Assignment 1 Ontology DesignDocument8 pagesCP2405 Assignment 1 Ontology DesignFredrick Oduor OmondiNo ratings yet
- (English) Time and The Brain - The Illusion of Now - Hinze Hogendoorn - TEDxUtrechtUniversity (DownSub - Com)Document14 pages(English) Time and The Brain - The Illusion of Now - Hinze Hogendoorn - TEDxUtrechtUniversity (DownSub - Com)Диана ТатарчукNo ratings yet
- ECM 206 Site VisitDocument36 pagesECM 206 Site VisitAZUAN BIN AHMAD FAUZI100% (2)
- Surge CounterDocument2 pagesSurge CounterJavier CuzcoNo ratings yet
- De Cuong On Thi HK2 Tieng Anh 10Document5 pagesDe Cuong On Thi HK2 Tieng Anh 10hoangtouri2512No ratings yet
- PTS Controller: Over Fuel Dispensers and ATG Systems For Petrol StationsDocument161 pagesPTS Controller: Over Fuel Dispensers and ATG Systems For Petrol StationsdawitNo ratings yet
- Antennas and Wave Propagation - Nov - 2015Document8 pagesAntennas and Wave Propagation - Nov - 2015Jyothi SamanthulaNo ratings yet
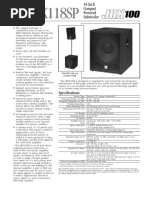
- JRX118SP SpecsheetDocument2 pagesJRX118SP SpecsheetLuisNo ratings yet
- SCCA2103 Leadership CommunicationDocument6 pagesSCCA2103 Leadership CommunicationsarahNo ratings yet
- Bantilan Maureen Lhee RDocument8 pagesBantilan Maureen Lhee RAlexa Anne Louise BercillaNo ratings yet
- NA BR 1177 EN Dematic AutoStore SubsystemDocument8 pagesNA BR 1177 EN Dematic AutoStore SubsystemDaniel Garnando KristianNo ratings yet
- STIGA - Vue Eclatée Moteur BRIGGS & STRATTONDocument32 pagesSTIGA - Vue Eclatée Moteur BRIGGS & STRATTONregis.petitjeanNo ratings yet
- Sample Question Paper Computer GraphicsDocument4 pagesSample Question Paper Computer Graphicsrohit sanjay shindeNo ratings yet
- Pipeline Construction InspecDocument48 pagesPipeline Construction InspecAliDadKhan100% (2)
- Qüestionari KPSI.: ActivitiesDocument2 pagesQüestionari KPSI.: ActivitiesfrancisNo ratings yet
- APAVE Tiger CP - UK - FINAL2Document1 pageAPAVE Tiger CP - UK - FINAL2AdrewhassTechnicaNo ratings yet
- FINAL THESIS DOC LastDocument114 pagesFINAL THESIS DOC LastMulat ShierawNo ratings yet
- Design Data 610 3450 9.5 1650 2 3300 2 1650 120Document3 pagesDesign Data 610 3450 9.5 1650 2 3300 2 1650 120miteshpatel191100% (1)
- Thing in Itself Kantian: AnstoßDocument1 pageThing in Itself Kantian: Anstoßwhynotbequiet23No ratings yet
- Wind Load On StructuesDocument14 pagesWind Load On StructuesNasri Ahmed mohammedNo ratings yet
- Hydraulics Laboratory ManualDocument37 pagesHydraulics Laboratory ManualHarold Taylor100% (2)
- Laws of ThermoDocument13 pagesLaws of ThermofabyunaaaNo ratings yet
- Climate Transition Finance Handbook Related Questions: 9 December 2020Document4 pagesClimate Transition Finance Handbook Related Questions: 9 December 2020glenlcyNo ratings yet