Professional Documents
Culture Documents
Box Jenkins
Uploaded by
Vsqz KellyCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Box Jenkins
Uploaded by
Vsqz KellyCopyright:
Available Formats
MODELOS ARIMA
Mayo 2001
Prof. Rafael de Arce
Prof. Ramn Maha
Dpto. Economa Aplicada
U.D.I. Econometra e Informtica
ADE Econometra II. Modelos de Series Temporales
Pgina 2
___________________________________________________________________________________
INTRODUCCIN
En 1970, Box y Jenkins desarrollaron un cuerpo metodolgico destinado a identificar, estimar y
diagnosticar modelos dinmicos de series temporales en los que la variable tiempo juega un papel
fundamental. Una parte importante de esta metodologa est pensada para liberar al investigador
econmetra de la tarea de especificacin de los modelos dejando que los propios datos temporales de
la variable a estudiar nos indiquen las caractersticas de la estructura probabilstica subyacente. En
parte, los procedimientos que vamos a analizar se contraponen a la "forma tradicional" de identificar y
especificar un modelo apoyndonos en las teoras subyacentes al fenmeno analizado aunque,
convenientemente utilizados, los conceptos y procedimientos que examinaremos constituyen una
herramienta til para ampliar y complementar los conocimientos economtricos bsicos.
Se comenzar analizando los modelos en los que una variable es explicada utilizando
exclusivamente una "exgena": su propio pasado. Podemos decir que la consideracin exclusiva de los
valores pasados de una determinada variable para explicar su evolucin presente y futura supone, al
mismo tiempo, una ventaja y un inconveniente:
- la ventaja radica en el hecho de no necesitar distintas series de datos (distintas variables)
referidas al mismo perodo de tiempo (caracterstica comn a todos los modelos univariantes) y, al
mismo tiempo, ahorrarnos la identificacin y especificacin del modelo en el sentido de la econometra
tradicional,
- el inconveniente es que, al renunciar a la inclusin de un conjunto ms amplio de variables
explicativas, no atendemos a las relaciones que sin duda existen entre casi todas las variables
econmicas perdiendo capacidad de anlisis al tiempo que renunciamos, implcitamente, al estudio
terico previo del fenmeno y a su indudable utilidad.
Dentro de estos modelos univariantes se desarrollarn suficientemente los conocidos con el
nombre de ARIMA. Posteriormente se complementar esta perspectiva univariante aadindose a la
especificacin una o ms variables exgenas al modelo "tradicional" aproximndonos al estudio de los
conocidos como modelos de transferencia.
Como es habitual en economa, definiremos una estructura que nos permita, por sus
caractersticas, cumplir el fin ltimo de prediccin: proceso estocstico estacionario. Diremos cuales
son las condiciones que ha de cumplir esta funcin para que podamos calcularla y definiremos el
proceso estocstico estacionario lineal y discreto. Posteriormente, analizaremos los modelos ms
simples (que emplean menos retardos) conforme a una serie de funciones caractersticas (covarianza,
autocorrelacin total y autocorrelacin parcial), describiendo sus condiciones y planteando estructuras
tericas que luego puedan ser identificables con series temporales reales.
DEFINICIN Y CONCEPTOS BSICOS DE LOS MODELOS ARIMA
Proceso estocstico y estacionariedad
Los modelos autorregresivos o de medias mviles que ms tarde conceptualizaremos
necesitan para su comprensin de la introduccin del concepto de proceso estocstico.
Un proceso estocstico es una sucesin de variables aleatorias Yt ordenadas,pudiendo tomar t
cualquier valor entre - y . Por ejemplo, la siguiente sucesin de variables aleatorias puede ser
considerada como proceso estocstico:
Pgina 3
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
Y -5 , y -4 , y -3 , y -2 ,........ y 3 , y 4
El subndice t no tiene, en principio, ninguna interpretacin a priori, aunque si hablamos de
proceso estocstico en el contexto del anlisis de series temporales este subndice representar el paso
del tiempo.
Cada una de las variables Yt que configuran un proceso estocstico tendrn su propia funcin
de distribucin con sus correspondientes momentos. As mismo, cada par de esas variables tendrn su
correpondiente funcin de distribucin conjunta y sus funciones de distribucin marginales. Esto
mismo ocurrir, ya no para cada par de variables, sino para conjuntos ms amplios de las mismas. De
esta forma, para caracterizar un proceso estocstico deberamos especificar las funciones de
distribucin conjunta de cualquier conjunto de variables:
( Y t 1 ,Y t 2 ,Y t 3 ,....Y t m )
cualesquiera que fueran los valores de (t1, t2,....tm) y cualquiera que fuera el valor de m; por ejemplo:
y1 , y 2 , y 3 ( t 1 = 1 y m = 3)
Y 3 , y 4 , y 5 , y 6 ( t 1 = 3 y m = 4)
Habitualmente, conocer esas funciones de distribucin resulta complejo de forma que, para
caracterizar un proceso estocstico, basta con especificar la media y la varianza para cada yt y la
covarianza para variables referidas a distintos valores de t:
E[ Y t ] = t
2
2
t = Var( y t ) = E[ y t - t ]
t = Cov(Y y ,Y s ) = E[( y t - t )( y s - s )]
Las distribuciones de probabilidad podran no estar completamente caracterizadas en algunas
de las variables, los momentos podran no coincidir incluso no existir para alguna de las variables
aleatorias, lo mismo puede ocurrir con las distribuciones conjuntas o marginales. Sin embargo, de todos
los tipos de procesos estocsticos posibles, nos interesan especialmente dos de ellos a los que la
estadstica ha dado nombres precisos:
- ruido blanco es una sucesin de variables aleatorias (proceso estocstico) con esperanza
(media) cero, varianza constante e independientes para distintos valores de t (covarianza nula).
- proceso estocstico estacionario.
ADE Econometra II. Modelos de Series Temporales
Pgina 4
___________________________________________________________________________________
Decimos que un proceso estocstico es estacionario si las funciones de distribucin conjuntas
son invariantes con respecto a un desplazamiento en el tiempo (variacin de t). Es decir, considerando
que t, t+1, t+2, ...., t+k reflejan perodos sucesivos:
F( Y t ,Y t +1 ,.....Y t +k ) = F( Y t+m ,Y t +1+m ,.....,Y t +k+m )
para cualquier t, k y m; por ejemplo:
F( y1 , y 2 ,......, y 6 ) = F( y 10 ,Y 11 ,..... y15 )
donde t = 1 ,k = 5 , m = 9
F( y3 ,Y 4 ,Y 5 ) = F( y7 ,Y 8 ,Y 9 )
donde t = 3 ,k = 2 , m = 4
Esta definicin de estacionariedad se conoce como estacionariedad en sentido estricto o
fuerte y puede relajarse sustancialmente utilizando la denominada estacionariedad en sentido
amplio o dbil. Decimos que un proceso estocstico es dbilmente estacionario si:
- Las esperanzas matemticas de las variables aleatorias no dependen del tiempo, son
constantes:
E[ Y t ] = E[ Y t +m ] m
- Las varianzas tampoco dependen del tiempo y son finitas:
Var[ Y t ] = Var[ Y t +m ] m
- Las covarianzas entre dos variables aleatorias del proceso correspondientes a perodos
distintos de tiempo (distintos valores de t) slamente dependen del lapso de tiempo
transcurrido entre ellas:
Cov(Y t ,Y s ) = Cov(Y t +m ,Y s+m ) m
De esta ltima condicin se desprende que, si un fenmeno es estacionario, sus variables
pueden estar relacionadas linealmente entre si, pero de forma que la relacin entre dos variables slo
depende de la distancia temporal k transcurrida entre ellas.
Lgicamente, la estacionariedad en sentido estricto grantiza la estacionariedad en sentido
amplio pero no al revs.
ADE Econometra II. Modelos de Series Temporales
Pgina 5
___________________________________________________________________________________
Una vez introducido el concepto genrico de proceso estocstico puede decirse que una serie
temporal cualquiera es, en realidad, una muestra, una realizacin concreta con unos valores concretos
de un proceso estocstico terico, real. El anlisis de series que vamos a estudiar tratar, a partir de
los datos de una serie temporal, inferir las caractersticas de la estructura probabilstica subyacente,
del verdadero proceso estocstico.
Modelos autorregresivos
La palabra ARIMA significa Modelos Autorregresivos Integrados de Medias Mviles.
Definimos un modelo como autorregresivo si la variable endgena de un perodo t es
explicada por las observaciones de ella misma correspondientes a perodos anteriores aadindose,
como en los modelos estructurales, un trmino de error. En el caso de procesos estacionarios con
distribucion normal, la teora estadstica de los procesos estocsticos dice que, bajo determinadas
condiciones previas, toda Yt puede expresarse como una combinancin lineal de sus valores pasados
(parte sistemtica) ms un trmino de error (innovacin).
Los modelos aotorregresivos se abrevian con la palabra AR tras la que se indica el orden del
modelo: AR(1), AR(2),....etc. El orden del modelo expresa el nmero de observaciones retasadas de
la series temporal analizada que intervienen en la ecuacin. As, por ejemplo, un modelo AR(1) tendra
la siguiente expresin:
Y t = 0 +1 Y t -1 + at
El trmino de error de los modelos de este tipo se denomina generalmente ruido blanco
cuando cumple las tres hiptesis bsicas tradicionales mencionadas al principio del texto:
- media nula
- varianza constante
- covarianza nula entre errores correspondientes a observaciones diferentes
La expresin genrica de un modelo autorregresivo, no ya de un AR(1) sino de un AR(p)
sera la siguiente:
Y t = 0 +1 Y t -1 + 2 Y t - 2 + ......+ p Y t - p + at
pudindose escribir de forma abreviada como:
p (L)Y t = 0 + at
donde p(L) es lo que se conoce como operador polinomial de retardos:
p (L) = 1 - 1 L - 2 L2 - ...... - p L p
Pgina 6
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
y donde, a su vez, el trmino L es lo que se conoce como operador retardo tal que, aplicado al valor de
una variable en t, d como resultado el valor de esa misma variable en t-1:
LYt=Yt-1
y aplicado sucesivamente p veces retarda el valor en p perodos
Lp Yt=Yt-p
Normalmente, se suele trabajar con modelos autorregresivos de rdenes bajos: AR(1) o
AR(2), o bien con rdenes coincidentes con la periodicidad de los datos de la serie analizada (si es
trimestral AR(4), si es mensual AR(12)....).
Modelo de medias mviles
Un modelo de los denominados de medias mviles es aquel que explica el valor de una
determinada variable en un perodo t en funcin de un trmino independiente y una sucesin de
errores correspondientes a perodos precedentes, ponderados convenientemente. Estos modelos se
denotan normalmente con las siglas MA, seguidos, como en el caso de los modelos autorregresivos,
del orden entre parntesis. As, un modelo con q trminos de error MA(q) respondera a la siguiente
expresin:
Y t = + at + 1 a t -1 + 2 a t -2 + ....+ q at -q
que de nuevo puede abreviarse utilizando el polinomio de retardos (como en en caso de los modelos
AR):
Y t = q (L) at +
Al igual que en el caso de los modelos autorregresivos, el orden de los modelos de medias
mviles suele ser bajo MA(1), MA(2) o corresponderse con la periodicidad de los datos analizados
MA(4), para series trimestrales, o MA(12) para series mensuales.
Interpretacin de un modelo de medias mviles
As como un modelo autorregresivo es intuitivamente sencillo de comprender, la formulacin
de un modelo de medias mviles resulta sorprendente para el no iniciado. Qu significa que una
variable aleatoria se explique en funcin de los errores cometidos en perodos precedentes?, De
dnde proceden esos errores?, Cul es la justificacin de un modelo de este tipo?.
En realidad, un modelo de medias mviles puede obtenerse a partir de un modelo
autorregresivo sin ms que realizar sucesivas sustituciones.
Efectivamente, un modelo AR(1), sin trmino independiente, tiene la expresin:
Pgina 7
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
Y t = Y t -1 + a t
si consideramos t-1 en lugar de t el modelo sera en este caso:
Y t -1 = Y t - 2 + at -1
y sustituyendo queda:
Y t = a t + a t -1 + Y t -2
2
si ahora sustituimos yt-2 por su expresin autorregresiva y as sucesivamente llegamos a un modelo del
tipo:
Y t = a t + a t -1 + at -2 + a t -3 + .... + a t - j + ....
2
que es la expresin, sin trmino independiente, de un modelo de medias mviles como el planteado
anteriormente. En realidad, de forma estricta, el paso de un modelo a otro debera realizarse al
contrario (de un MA a un AR) utilizando el teorema general de descomposicin de Wold.
Condiciones y races unitarias para los modelos AR y MA
Hemos dicho anteriormente que, bajo condiciones generales, todo proceso estocstico
estacionario se prestaba a una especificacin tipo AR(p) y en consecuencia poda expresarse tambin
como un MA(q). Es ahora el momento de especificar lo que antes hemos llamado "condiciones
generales" y examinar en que casos es posible la realizacin de un proceso AR MA para
representar un proceso estocstico estacionario.
Para que un proceso estocstico estacionario admita una formulacin del tipo que aqu
estudia remos han de cumplirse dos condiciones accesorias:
el proceso no debe ser anticipante (hiptesis de recursividad temporal); lo que quiere decir
que los valores de una variable en un momento t no dependern de los que esta misma tome en t+j,
siendo jota cualquier valor superior a cero.
el proceso ha de ser invertible; lo que supone que la correlacin entre una variable y su pasado
va reducindose a medida que nos alejamos ms en el tiempo del momento para el que estamos
considerando dicha correlacin (proceso ergdico). La explicacin intuitiva de esta situacin
derivara de que si el especificramos una variable en funcin de ciertos coeficientes que nos
determinen su correlacin con los valores pasados de ella misma, los valores de dichos coeficientes
deberan ser necesariamente inferiores a uno, porque sino el proceso de infinitos nmeros sera
"explosivo".
Pgina 8
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
La estacionariedad de las series temporales en la realidad
Queda clara que la aproximacin a los procesos estocsticos con modelos AR o MA est
restringida, en trminos generales, a aquellos procesos estocsticos que cumplan, al menos de forma
dbil, la restriccin de estacionariedad. Cuando, en la realidad, queremos inferir a partir de una serie
temporal (muestra) la estructura del proceso estocstico mediante modelos AR MA, debemos cubrir
dos etapas:
- asegurarnos de que la serie temporal, como muestra del proceso estocstico, es estacionaria
y, si no lo es,
- transformar la serie temporal original de forma que la nueva serie transformada si lo sea.
a) cmo verificamos si la serie a analizar es estacionaria en media? cmo lograr
que lo sea? Filtrado de la serie original
Para resolver la primera cuestin existen diversos mtodos de aproximacin y, de entre ellos,
destacamos Podramos subdividir la serie temporal en varios perodos de, aproximadamente, la misma
longitud, y calcular su media. El proceso sera estacionario en el caso en que dichos estadsticos
fueran prcticamente iguales para todos los subperodos analizados. En la mayora de los casos, un
simple grfico sirve para observar si existe o no una clara tendencia y, por tanto, si la serie es
estacionaria o no.
Habitualmente, cuando una serie muestra tendencia, se subdivide dicha serie en dos
componentes: una primera, la estimacin de dicha tendencia, y, la segunda, el residuo o error que se
comete cuando se utiliza dicha tendencia como valor estimado de la serie original.
y t = Tt + rt
Una vez estimada la tendencia, aproximada con una regresin lineal, parablica, exponencial
... que sea ms conveniente; trabajaremos con la serie del residuo, que entonces no mostrara
tendencia y podremos decir que es estacionaria en media. Es sobre este residuo sobre el que
llevaremos a cabo todo el proceso descrito como metodologa de identificacin ARIMA, sumando
finalmente el valor de la tendencia estimada si queremos dar resultados de estimacin de la serie
original. Es decir:
1.- la identificacin del proceso ARIMA se har sobre esta serie del residuo rt = yt Tt , estimada
previamente la tendencia del modo ms adecuado.
2.- Para obtener valores estimados de la serie original, sumaremos el componente tendencial al valor
estimado del residuo mediante el modelo ARIMA y t = Tt + rt .
A este procedimiento se le conoce con el nombre de filtrado de la tendencia de la serie. Por supuesto,
existen muy variadas formas de aplicar un filtro, siendo la que aqu hemos enunciado la ms sencilla.
b) Cmo se comprueba si una serie es estacionaria en varianza? Orden de
integracin
Sin duda alguna, el test ms habitual a la hora de determinar la estacionariedad de una serie
temporal, consiste en la aplicacin del conocido como test de DickeyFuller (Test DF) o Dickey-Fuller
Pgina 9
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
Ampliado (Test ADF). ste es un contraste de No estacionariedad ya que la hiptesis nula es
precisamente la presencia de una raz unitaria en el proceso generador de datos de la serie analizada.
Vamos a suponer inicialmente, como modelo de partida para el anlisis de una determinada
serie yt, el de un proceso estacionario autorregresivo de orden uno:
y t = a1 yt 1 + t
(Ec. 1)
frente a este modelo se plantea, como hiptesis nula H0, el modelo alternativo de un paseo
aleatorio no estacionario del tipo1:
y t = y t 1 + t
se trata por tanto de contrastar si el coeficiente a1 es igual a la unidad o distinto de ella.
Sin embargo, para contrastar la nulidad del coeficiente a1, no podemos utilizar el
contraste t habitual sobre una estimacin por MCO del primer modelo. La razn es que la
hiptesis nula que habitualmente se contrasta y, a partir de la cual se deriva la expresin y propiedades
del test t, es la de nulidad del parmetro (a1=0) de la (Ec.2), sin embargo, en nuestro caso,
necesitaramos contrastar H0: a1=1. Si la hiptesis nula fuera cierta, la varianza de yt no sera
estacionaria sino que crecera con los valores de t segn la expresin de la varianza de un paseo
aleatorio con deriva:
Var( y t ) = t 2
La estimacin de a1 en y t = a1 y t 1 + t ser siempre consistente sin embargo, su distribucin
variar segn los valores que tome la estimacin. Utilizando las palabras de Novales (1993), la
distribucin de probabilidad asinttica del estimador de MCO del modelo AR(1) presenta una
discontinuidad cuando a1=1 y, como sustituto, debern utilizarse las distribuciones derivadas de
forma emprica mediante un procedimiento de Montecarlo realizado por Dickey (1976). Ms
recientemente, MacKinnon (1991) realiz un nmero mayor de simulaciones que las tabuladas por
Dickey y Fuller. Adems, MacKinnon estim la superficie de respuesta usando los resultados de la
simulacin, lo que permite calcular los valores crticos del test DF para cualquier tamao muestral y
cualquier nmero de variables en el lado derecho de la ecuacin.
En la prctica, por cuestiones de sencillez operativa, el modelo utilizado para el contraste DF no es el
expuesto al comienzo del epgrafe sino otro, equivalente al anterior, que se obtiene restando a uno y
otro lado el trmino yt-1:
y t = y t 1 + t yt = t en un proceso de este tipo, sustituyendo recursivamente se obtiene:
t
t
y t = y 0 + i , proceso con media constante E[ y t ] = E y 0 + i = E[ y 0 ] = y 0 y varianza
i =1
i =1
t
V [ y t ] = E[ y t E [ y t ]] = E y 0 + i y 0 = E i =
estocstica:
i =1
i =1
2
2
2
2
= E 1 + 2 ..... + 1 2 + 1 3 + ..... = E 1 + 2 .... + t2 = t2
2
Pgina 10
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
y t y t 1 = a0 + a1 y t 1 yt 1 + t
y t = a0 + ( a1 1) y t 1 + t
y t = a0 + yt 1 + t
(Ec. 2)
por tanto, la hiptesis nula inicial para la (Ec. 2), se transforma ahora en H0: =0 frente a H1:
<0. Decir que es nulo es lo mismo que decir que a1=1, o sea, que existe una raz unitaria, decir que
es menor que cero equivale a decir que a1 es menor que la unidad (proceso autorregresivo
estacionario) 2.
El procedimiento bsico para la aplicacin simple del test DF es, a partir de aqu,
aparentemente sencillo. Se estima el modelo propuesto y se calcula el valor estimado de la t del
parmetro analizado. Una vez calculado se compara con el valor emprico de referencia obtenido con
las tablas de Dickey y Fuller o de MacKinnon. Si el valor estimado para es inferior en valor absoluto
al tabulado dado un determinado nivel de confianza, admitiremos la hiptesis nula, o sea, la presencia
de una raz unitaria.
El modelo expuesto hasta el momento es el ms simple posible, pero cabe que el modelo ms
adecuado a la realidad incluya otros trminos, como una constante y/o una tendencia. Dolado et al.
(1990) y Perron (1990) propusieron, entre otros autores, seguir un proceso en etapas a fin de
garantizar el xito en la eleccin del modelo de referencia en el mayor nmero de ocasiones:
En primer lugar se estimara el modelo menos restringido (con trmino constante y
tendencia determinista).
Dado que el principal error de esta tctica inicial consistira en la escasa potencia del
contraste para el rechazo de la hiptesis nula por inclusin de variables irrelevantes, si los
valores crticos indican rechazo (ausencia de raz unitaria), terminaramos el
procedimiento.
En el caso de no rechazarse la hiptesis nula de presencia de una raz unitaria, es decir, en
el caso en que admitamos la presencia de una raz unitaria (H0: =0) pasaramos ahora a
examinar la significatividad del parmetro tendencial determinista a2. Dado que, en este
punto, estaramos bajo la hiptesis ya admitida de que =0, utilizaramos el valor de
referencia de e incluso, para mayor seguridad, tambin el contraste conjunto 3
(a2==0).
Si el trmino tendencial resulta significativo (a2 0) contrastaremos de nuevo la presencia
de una raz unitaria (H0: =0) pero utilizando entonces las tablas de una normal
estandarizada. Sea cual sea el resultado del test con las nuevas tablas finalizaramos aqu
el contraste admitiendo o rechazando la presencia de una raz unitaria.
Si el trmino tendencial es no significativo, deber replantearse el modelo inicialmente
estimado pasndose a examinar otro con trmino constante pero sin esta tendencia
determinista. Con este modelo se vuelve a analizar la presencia de una raz unitaria (=0).
En el caso en que, nuevamente, se sostenga la presencia de una raz unitaria, se
contrastar entonces la adecuacin del trmino independiente a0 bien con el contraste ,
bien con 1. Si el trmino independiente resulta significativo usamos de nuevo las tablas de
No se considera el caso de procesos autorregresivos explosivos en que a1>1
Pgina 11
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
una normal para contrastar la presencia de la raz unitaria, concluyendo de nuevo aqu el
contraste.
-
Slo si entonces la constante a0 es no significativa se utiliza el modelo ms simple como
modelo de referencia contrastndose, de nuevo, la presencia de raz unitaria. En este caso,
no tiene cabida el uso de la distribucin normal estandarizada.
Est claro que lo expuesto hasta este momento permite contrastar la presencia de una o ms races
unitarias en una determinada serie temporal para la que se supone un proceso AR(1). Sin embargo,
muchas serie temporales se ajustan ms adecuadamente a procesos autorregresivos de orden superior
AR(2) o AR(3). No parece, por tanto, muy correcto, contrastar la presencia de una o ms races
unitarias utilizando siempre la estructura de un modelo AR(1) ya que las races unitaria s pueden
aparecer tambin en estructuras ms complejas. Este problema da lugar a lo que se conoce como test
de races unitarias de Dickey-Fuller Ampliado (DFA): si se quiere contrastar la presencia de una raz
unitaria en una serie que sigue un proceso AR(p), deber aplicarse el procedimiento expuesto para el
caso simple AR(1), pero suponiendo ahora del modelo:
p
y t = a 0 + y t 1 + i y t i +1 + t
i= 2
donde:
p
= 1 ai
i =1
y:
p
i = a j
j =1
MODELO ARIMA(p,d,q) SARIMA(P,D,Q)
En su forma ms general el modelo ARIMA(p,d,q) ARIMA(P,D,Q,) S podra escribirse como:
Y T = 1 Y T -1 +2 Y T - 2 + ...+ Ps+ p +Ds+d Y T - Ps- p - sD -d +
+ +U T +1 U T -1 + ...+ Qs+q U T - sQ -q
Entendiendo que puede haber ms de un proceso generador de la serie (en la parte regular y
en la estacional) y escribiendo una combinacin de los modelos MA(q) y AR(p) que han precisado de
una serie de diferenciaciones "d" en la parte regular o "D" en la parte estacional para que fueran
estacionarios.
FUNCIONES DE UN PROCESO ESTOCSTICO ESTACIONARIO
Definido un proceso estocstico como estacionario (ya sea de forma dbil o fuerte), ya se ha
comentado que si cumple las condiciones en sentido estricto, tambin cumple las condiciones en
sentido dbil. Siendo as, el proceso estara perfectamente definido si conocieramos su media
constante (), su varianza constante () y la covarianza entre cada par de momentos diferentes en el
Pgina 12
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
tiempo. Dicho sto:
La funcin de autocovarianza vendr definida por los distintos valores que tomara dicha
covarianza cuando cambiamos el lapso temporal entre las observaciones de la serie que manejamos.
Analticamente, se podra expresar como:
j = cov( yt , y t - j ) = E[( yt - )( y t - j - )]
donde, evidentemente, cuando el valor de "j" es cero, tendramos la varianza de la funcin:
0 = cov( yt , y t -0 ) = E( y t - )2 = 2
La funcin de autocorrelacin se define igualmente como:
j =
cov( y t , yt - j )
var( y t ) var( yt - j )
como nos encontramos ante un proceso definido como estacionario, la varianza es constante,
por lo que podemos escribir:
j =
j
0
La funcin de autocorrelacin de un proceso estocstico estacionario manifiesta las siguientes
propiedades:
1.- _ 0 = 1
2.- |_j| 1, ya que |j| 0
Esto asegura que el comportamiento de la funcin no sea explosivo.
3.- _ j = _-j (simetra)
dado que si un proceso es estacionario, la covarianza de dos variables aleatorias separadas por
el mismo lapso de tiempo es la misma.
4.-
lim
j infinity
j = 0 25 (proceso ergdico).
Esta ltima propiedad, que define al proceso como "ergdico", es la que posibilita inferir
valores de una serie en funcin de la informacin que sobre ella nos da su propio pasado, logrando
estimadores consistentes. Slo si se da esta propiedad, la prdida de informacin al no considerar la
influencia de los infinitos valores obtenidos en el pasado es cada vez ms escasa e, incluirlos, aadira
poca informacin para la definicin del proceso generador de datos que se intenta reproducir para
aplicar al futuro.
Adems de las dos funciones anteriores, se puede definir una tercera conocida como funcin
de autocorrelacin parcial, con el fin de tener en cuenta los valores de correlacin entre dos
variables aleatorias separadas entre si "j" perodos y en funcin de los valores intermedios entre ellas.
Es decir:
Pgina 13
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
j = corr( y t , yt - j | y t -1 , y t - 2 ,..., y t - j +1 )
Si planteamos las mejores predicciones de yt e yt-j como los resultantes de plantear Mnimos
Cuadrados Ordinarios (MCO) siendo el primero de ellos del siguiente modo:
y t = 1 y t -1 + 2 yt -2 + ...+ j -1 y t - j +1
Se puede escribir la funcin de autocorrelacin parcial, si la media es nula, como:
j=
cov[( yt - y t )( y t - j - y t - j )]
var( y t - y t ) var( y t - j - y t - j )
Pudiendo demostrarse que:
j=
j - 1 j - 1 - j - 2 - ... - j -1 1
1 - 1 1 - 2 2 - ... - j -1 j -1
APLICACIN DE ESTAS FUNCIONES A MUESTRAS CONCRETAS
En este apartado se pretender especificar estimaciones de los valores que caracterizan el
proceso estacionario del tipo que se est describiendo ya no para el proceso estocstico general, sino
para una manifestacin concreta de ste traslucida en una serie temporal. Habr que estimar la media
(), para lo que usaremos la media muestral; la varianza (0) y la funcin de autocovarianza (j), para
lo que emplearemos la frmula de la covarianza muestral) y la funcin de autocorrelacin ( j).
Media muestral.
Como ya se ha dicho, el estimador =E(yt) ser la media muestral:
y=
1 T
yt
T t =1
dicho estimador cumplir dos propiedades:
a)
Insesgadez.- la esperanza de la media de la serie ser igual a
Esto se demuestra ya que:
E( y ) =
b)
1 T
1
e( y y ) = _T _ =
T t =1
T
Consistencia.- es decir, la varianza se anula cuando ampliamos la muestra a la poblacin
Pgina 14
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
siendo el estimador insesgado, propiedad que se cumplir siempre que se d la siguiente condicin, que
no desarrollamos:
Funcin de autocovarianza muestral.
El estimador de j se obtendr segn la siguiente expresin:
Cj=
1 T
( y t - y )( yt - j - y )
T - j t
= j+1
que, a pesar de ser sesgado, dicho sesgo ser determinable y cada vez ms reducido segn se
aumente la muestra.
Funcin de autocorrelacin muestral.
Para su clculo se recurrir al cociente de funciones de autocovarianza del siguiente modo:
rj=
j
0
Cj
C0
El estimador para la funcin de autocorrelacin parcial a emplear se calcular segn el
mtodo recursivo de Durbin del siguiente modo:
11 = r 1
j
j+1 , j +1 =
r j +1 - ji r j +1 -i
i=1
j
1 - ji ri
i =1
ji ,i = ji - j+1 , j+1 j, j +1-i /i = 1...j
ADE Econometra II. Modelos de Series Temporales
Pgina 15
___________________________________________________________________________________
Empleando estas frmulas para los primeros casos, podremos escribir:
11 = r1
r 2 - 11 r 1
22 =
1 - 11 r1
21 = 11 - 22 r 1
r3 - 21 r 2 - 22 r 1
=
33
1 - 21 r1 - 22 r 2
31 = 21 - 33 22
32 = 22 - 33 21
PROCESO ESTOCSTICO ESTACIONARIO LINEAL DISCRETO
Vamos a definir un nuevo caso especial de un proceso estocstico que nos permita luego
intentar encontrar algo parecido en la realidad y que sea fcilmente identificable.
Se conoce por proceso estocstico estacionario lineal y discreto a aquel que puede expresarse
como:
y t = + a t + 1 a t -1 + 2 a t - 2 + ....
donde:
- es lineal porque puede escribirse como combinacin lineal de los errores.
- at es ruido blanco (esperanza y covarianza nulas y varianza constante).
- es discreto porque los lapsos temporales considerados son uniformes (no hay saltos temporales
distintos entre las variables consideradas).
El siguiente paso ser especificar las condiciones que nos aseguran que este proceso es
estacionario, es decir que tiene media y varianza constantes y que su covarianza slo vara cuando lo
hace el espacio temporal que separa las observaciones empleadas para calcularla. Para ver estas
condiciones, calcularemos los momentos de primer y segundo orden asegurando la estacionariedad en
sentido dbil.
Media constante:
Pgina 16
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
E( yt ) = E( + a t + 1 at -1 + ....) = + i E( at )
i=0
/ = 1 y = k <
0
i=1
Es decir la media ser constante en la medida en que exista la segunda parte del sumando que,
al quedar multiplicada por la esperanza del "ruido blanco" ser finalmente cero, y la media quedar
igual a .
Varianza constante:
0 = E( y t - )2 = E( - 2 + a t + 1 a t -1 + 2 a t - 2 + .... )2 =
= E( a 2t + 12 at2-1 + 22 a 2t -2 + ...+ 2 1 at at -1 + 2 2 at at - 2 + ...) =
= 2a (1 + 12 + 22 + ...+ 0 + 0)) =
= 2a 2i
/ =1
0
i =0
Siendo entonces condicin necesaria para que la varianza exista que el ltimo sumatorio sea
calculable (converja).
Covarianza constante:
j = E[( yt - )( y t - j - )] =
E[( a t + 1 at -1 + 2 a t -2 + ...)( a t - j + 1 a t - j -1 + 2 at - j - 2 + ...)] =
= j E( a 2t - j + 1 j +1 E( at2- j -1 + 2 j+2 E( a 2t - j - 2 ) + ... =
a ( j + 1 j +1 + 2 j +2 + ....= a i i + j
2
i =0
Luego el proceso ser estacionario en la medida en que se cumplan estas tres condiciones:
Pgina 17
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
E( a ) / = 1 y = k <
i
i=0
i=1
< / = 1
2
i
i=0
i+ j
<
i=0
Ventajas:
Una vez definido este proceso particular, vamos a ver resumidamente sus ventajas respecto a
no contar con l.
En principio, si quisieramos definir un proceso estocstico en general, tendramos, al menos,
que definir sus momentos de primer y segundo orden, para lo cual sera necesario estimar T varianzas,
T esperanzas y (T2 -T)/2 covarianzas, lo que nos es imposible si slo contamos con T datos.
Si el proceso fuera estacionario, ya slo tendramos que estimar una esperanza y una varianza
(media y una varianza constantes) y (T-1) covaria nzas (cov(yt,yt-1), cov(yt,yt-2), ...); en total 1+1+(T1)=T+1 parmetros, lo que tampoco es posible. Si estamos ante un proceso estocstico estacionario
lineal discreto, slo necesitaremos contar con:
T > p+ q + 2
siendo "p" y "q" los rdenes de los retardos de los modelos autorregresivos y de medias mviles que ya
hemos definido anteriormente.
MODELOS MA(1)
Una vez tenemos definidas las ventajas de contar con un proceso estocstico estacionario
lineal y discreto, y que podemos calcular las funciones de autocovarianza y autocorrelacin, puede
resultar interesante ver que valores toman stas en aquellos casos sencillos que luego nos permitan
comprobar si series econmicas generales pueden tener un comportamiento similar, simplemente
acudiendo a la comparacin de sus correlogramas (de la funcin de autocorrelacin total y parcial).
El primer caso a analizar ser el modelo de medias mviles de orden uno, que se define como:
y t = + a t + 1 a t -1
Este modelo tambin se puede escribir en funcin del operador retardo, ya comentado, del
siguiente modo:
Pgina 18
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
yt = +(L) a t
/ (L) = 1 - 1 L
Se dice que un modelo MA(q) es invertible en la medida en que se pueda escribir como un
proceso autorregresivo de orden infinito. Para que esta circunstancia pueda darse, ser condicin
necesaria que las races de:
1 - (L) = 0
caigan fuera del crculo unitario, lo que se cumplir siempre que ||<1
Esta situacin proviene de la conversi n del modelo de medias mviles en modelo
autorregresivo. Si escribimos el MA(1) como:
y t = + a t + 1 a t -1
Podemos hacer sucesivas sustituciones hasta llegar al modelo autorregresivo:
a t -1 = yt -1 - - 1 at -2
y t = + ( y t -1 - - 1 a t - 2 ) + a t
y t = + at + 1 y t -1 - 1 - 12 y t.2 - .... =
= 1 yt -1 + 21 yt -2 + ...+ (1 +1 +12 + 31 + ...+ n1 -1 ) + at - 1n at -n
si n :
y t = yt -1 + 12 y t - 2 + ... +
1
+ at
1 -1
donde es necesario que ||<1 para que la progresin geomtrica que se produce sobre los
parmetros sea calculable y no explosiva.
El siguiente paso, una vez definida la condicin de invertibilidad, es definir las funciones que se
han descrito para los procesos estocsticos en general para el caso del modelo MA(1).
ADE Econometra II. Modelos de Series Temporales
Pgina 19
___________________________________________________________________________________
Esperanza:
E( yt ) = E( + at + 1 a t -1 ) = E( ) + E( at ) +1 E( at -1 ) =
Varianza:
var( yt ) = E( y t - )2 = E( + a t +1 at - 1 - )2
E( a 2t +12 a 2t -1 + 2 1 at a t -1 ) =
= 2a + 21 2a + 0 =
Funcin de autocovarianza:
1 = cov( y t , y t -1 ) = E(( y t - )( y t -1 - )) =
E(( at + 1 a t -1 )( a t -1 + 1 a t - 2 )) =
E( at a t -1 + 1 a t a t -2 + 1 a t -1 a t -1 + 21 a t -1 a t - 2 =
2
1 E( at -1 ) = 1 2a
j = cov( y t , y t - j ) = E(( y t - )( y t - j - )) =
E(( at + 1 a t -1 )( a t - j + 1 a t - j -1 )) =
= E( at a t - j + 1 a t -1 a t - j + 1 a t at - j -1 + 21 a t -1 a t - j -1 )
E( aT a t - j + 1 a t -1 a t - j + 1 a t at - j -1 + 21 a t -1 a t - j -1 ) = 0 = j
Luego la funcin de autocovarianza se anula para valores de "j" mayores que uno y es una
fracci n de la varianza del error para el valor de j=1.
Pgina 20
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
Funcin de autocorrelacin:
Calculada como cociente entre la funcin de autocovarianza y la varianza, tal y como ya se
vio antes, tendramos:
j =
j
0
1 = 1 2a
j = 0
/j > 1
La funcin de autocorrelacin parcial se calculara siguiendo la siguiente expresin, que no
demostramos:
1 (1 - 1 )
jj =
1 - 21 ( j+1)
j
Definidas las funciones caractersticas de los procesos estocsticos para el caso concreto del
MA(1), podemos enunciar las siguientes particularidades de este tipo de proceso:
1.2.3.4.-
Siempre es estacionario.
Para ser invertible, es necesario que ||<1.
La j slo tiene un punto significativo. El modelo "olvida" la correlacin con perodos distintos
al inmediatamente anterior y el correlograma slo tendr un punto significativo.
La funcin de autocorrelacin parcial no se anula, pero tendr un comportamiento
amortiguado hacia cero.
MODELOS AR(1)
Definido el modelo AR(1) como:
y t = 0 + 1 yt -1 + a t
que tambin puede escribirse como:
(L) y t = 0 + at
(L) = 1 - 1 L
a diferencia de los modelos de medias mviles, los autorregresivos no son estacionarios por
definicin y, para que lo sean, ha de cumplirse que las races de la siguiente ecuacin sean mayores
que uno:
Pgina 21
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
(L) = 1 - 1 L = 0
lo que nos permitira escribirlo como un modelo de medias mviles y, en definitiva, esto supone que los
coeficientes | | han de ser menores que 1.
Pasamos a describir las funciones definidas:
Esperanza matemtica:
E( yt ) = E(1 y t -1 + 0 + a t ) =
= 1 E( y t -1 + 0 + 0
donde, como el proceso es estacionario, las esperanzas E(yt)=E(yt-1)=...=E(yt-j)= y puedo escribir:
E( yt ) = = 1 + 0
=
0
1 - 1
Varianza:
Para hacer los clculos con mayor facilidad es conveniente poner el modelo autorregresivo en
desviaciones a la media, sin que ello suponga ningn cambio en ste (se puede hacer la prueba
escribiendo el modelo en desviaciones y llegando al modelo normal).
El modelo en desviaciones a la media lo definiremos como:
~
y t = 1 ~y t - 1 + at
donde:
~
y t - j = y t- j - = y t j - 0
1 - 1
Pgina 22
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
Para calcular la varianza, escribimos el momento de segundo orden:
var( y t ) = 0 = E( 1 ~y t -1 + at )2
E( 21 y 2t -1 + at2 + 2 1 ~y t - 1 at ) =
21 E( ~
y t -1 )2 + E( a t )2 + 2 1 E( ~y t -1 at )
dado que el proceso es estacionario:
E( ~y t )2 = E( ~y t -1 )2 = 0
E( at )2 = 2a
como el proceso en desviaciones a la media se puede escribir como un proceso de medias
mviles y por lo que hemos visto anteriormente, podramos escribir:
E( at ~
y t -h ) = 2a /h = 0 y 0 si h > 0
Por todo lo cual:
0 = 21 0 + 2a
0 =
2a
1 - 12
Pgina 23
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
Funcin de autocovarianza:
1 = cov( ~
y t ~y t -1 ) = E( ~y t -1 ( 1 ~
y t -1 + a t )) =
= 1 0 = 1 a 2
1 - 1
2
2 = cov( ~y t ~
y t -2 ) = E( ~y t -2 ( 1 ~y t -1 + a t )) =
2
1 = 12 0 = 21 a 2
1 - 1
Lo que generalizando, se podra escribir como:
j = a 2 1j
1 - 1
2
Funcin de autocorrelacin total
j = 1j /j 1
Funcin de autocorrelacin parcial
jj = 1 /j = 1 y 0 si j > 1
Definidas todas estas funciones, podemos caracterizar el proceso autorregresivo del siguiente
modo:
1.2.3.4.-
Siempre es invertible (est directamente invertido).
Para ser estacionario, ha de cumplirse que | |<1.
La funcin de autocorrelacin total no se anula, pero se va amortiguando hacia cero.
La funcin de autocorrelacin parcial se anula para retardos superiores a uno.
Pgina 24
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
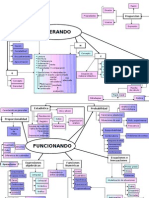
FAC
FAP
MA(q)
Se anula para retardos superiores a q
Decrecimiento rpido sin llegar a
anularse
AR(p)
Decrecimiento rpido sin llegar a
anularse
Se anula para retardos superiores a p
ARMA(
p,q)
Decrecimiento rpido sin llegar a
anularse
Decrecimiento rpido sin llegar a
anularse
IDENTIFICACIN DEL MODELO
Aunque podramos seguir definiendo las caractersticas de otros procesos ARIMA de rdenes
mayores, no tiene mayor inters una vez se ha entendido el procedimiento y s interesa precisar la
forma que adoptaran los correlogramas de estas funciones porque, fruto de su comparacin con los
que obtendremos con nuestras series de inters, podremos asociar a nuestra serie temporal de estudio
un proceso ARIMA que identifique su proceso generador de datos, tanto a pasado como a futuro.
Los correlogramas o funciones de autocorrela cin total y parcial estn disponibles en el libro
de Pulido,A(1989): "Prediccin Econmica y Empresarial" Editorial Pirmide.
De forma muy poco acadmica, el proceso de identificacin consistir en calcular las
funciones de autocorrelacin total y parcial de nuestra serie (una vez estamos seguros de que sta
cumple las condiciones que definen un proceso estocstico estacionario) y comparar sus
correlogramas con los correspondientes a los modelos tericos AR(p),MA(q) o ARMA(p,q).
En principio, si el proceso est bien identificado, procederemos a su estimacin y, si
analizamos los correlogramas de los residuos obtenidos en la estimacin, sern "ruido blanco". Si sto
no es as, habr que realizar una nueva estimacin incorporando la estructura ms parecida al modelo
terico que podamos intuir con la comparacin con los modelos tericos.
Para saber cuando estamos ante un "ruido blanco", se pueden hacer las siguientes
comprobaciones:
-
Media nula
Puede observarse en el grfico de residuos si el error se mueve en torno al valor cero o bien
calcularse el cociente entre la media y la varianza muestral de los residuos. Si ese ratio es inferior a 2,
podemos concluir (con un =0,05) que la media no es significativamente distinta de cero.
-
Varianza constante
Observando el grfico de los residuos puede analizarse la constancia de la varianza del error.
En caso de heterocedasticidad y es recomendable una transformacin logartmica en la serie original.
-
Incorrelacin
Deben observarse los coeficientes de autocorrelacin muestral de los residuos y comprobar
que ninguno de ellos supera el valor de las bandas de significatividad al 5% (1,96(1/T)).El valor Tes
una aproximacin de la varianza asinttica pero resulta slo adecuada para valores grandes de "j". Se
aconseja,por tanto, utilizar distinta amplitud de bandas como por ejemplo (1/T) para los trminos ms
cercanos a cero.
Pgina 25
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
El estudio de las funciones de autocorrelacin muestral y autocorrelacin parcial muestral de
los residuos, pueden servirnos fcilmente para el replanteamiento del modelo inicial.
El contraste de la "Q" de Box-Pierce analiza la hiptesis nula de que:
H0: 1(a)= 2(a)= 3(a)=.......... M(a)=0
suponiendo que la expresin:
M
Q = T r 2j (a )t
j=1
o la alternativa propuesta por Ljung-Box:
M
*
-1
Q = T(T + 2) (T - j ) r 2j (a )t
j=1
se distribuye como una chi-cuadrado con M-k grados de libertad. Otros contrastes alternativos
son los de Vandaele (1983), que analiza las autocorrelaciones muestrales de los residuos
transformados mediante una diferencia regular y el de Pea (1983).
BREVE RESEA SOBRE LA ESTIMACIN DE LOS MODELOS ARIMA
Se analizar a continuacin el proceso de estimacin de los modelos ARMA(p,q) x
ARMA(P,Q), centrando los desarrollos en el caso especfico de un modelo sin componente estacional,
es decir, un ARMA(p,q) ARIMA (p,d,q):
(1 - 1 L - 2 L2 - ...... - p L p ) wt = + (1 - 1 L - 2 L 2 - ...... - q Lq ) at
donde se entiende por Wt la serie ya en diferencias y donde, como siempre, at se supone un
ruido blanco con media cero y varianza constante (2u).
Definida esta funcin genrica, el objetivo principal es estimar el vector formado por los
parmetros correspondientes a la parte autorregresiva j y de medias mviles j (incluido, si fuera
necesario, el trmino independiente) as como la varianza residual.
Problemas iniciales: los valores iniciales y la no linealidad.
La naturaleza del modelo implica que la variable a explicar se hace depender de valores
pasados de la misma y errores cometidos en la estimacin de dichos valores pasados. De esta forma
el planteamiento de minimizacin de los errores como procedimiento de estimacin lleva
necesariamente aparejada la necesidad de conocer valores pasados de la variable endgena y
Pgina 26
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
de los errores ya que la expresin del error, por ejemplo para un perodo "t" sera:
a t = wt - 1 W t -1 - ... - p wt - p - +1 u t -1 - ... - q at -q
Al conjunto de valores iniciales requeridos de la variable endgena desde "t-1" a "t-p" y de los
errores desde "t-1" a "t-q" los notaremos por los vectores:
0
W = ( W t -1 ,W t -2 ,.....,W t - p )
a 0 = ( at -1 , at - 2 ,....., at - q )
El procedimiento de estimacin que lleva implcita la especificacin a priori de unos valores
iniciales se denomina "enfoque condicional", mientras que aquel en el que se estiman simultneamente
los valores iniciales y los parmetros se denomina "enfoque exacto".
Adems de este primer problema, se seala el de la no linealidad del modelo cuando este
incluye medias mviles, lo que puede comprobarse fcilmente a partir de una transformacin de la
especificacin de un modelo sencillo [por ejemplo MA(1)]:
Y t = a t - 1 a t -1 a t = Y t +1 at - 1
para t = 1 a1 = Y 1 +1 a0
para t = 2 a 2 = Y 2 + 1 a1 =
= Y 2 + 1 ( y 1 +1 a0 ) =
= Y 2 +1 Y 1 +12 a 0
Partiendo de esta expresin, se observa como al minimizar:
T
t=1
(3)
3
El trmino " T " hace referencia a los valores disponibles de la serie una vez tomadas diferencias tanto en la
componente regular (d) como en la estacional (D):
Pgina 27
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
en el proceso de estimacin, esta expresin no ser lineal. Por ello, una primera conclusin es
que sea cual sea el mtodo de estimacin utilizado (Mnimos cuadrados o Mxima verosimilitud)
debern aplicarse algoritmos de resolucin no lineales.
PREDICTOR PTIMO.
"La prediccin es el fin ltimo y primordial del anlisis univariante de series temporales"4
Una vez identificado y estimado el modelo ARIMA, se plantea su utilizacin para conseguir la
mejor prediccin de los valores a futuro de una serie a partir de su propia historia. El primer
interrogante que surge se referir a la determinacin del PREDICTOR PTIMO para este fin.
Intuitivamente, el mejor predictor posible ser "el que menos se equivoca" o, en trminos
estadsticos, aquel que minimiza el error cuadrtico medio respecto a otro potencial predictor
alternativo. Esto se puede expresar:
E[( Y T +l - Y T (l) )2 | I T ] E[( Y T +l - Y *T (l) )2 | I T ]
donde YT (l) sera el valor de prediccin de la serie para el perodo (T+l), condicionado a los
valores histricos de YT (YT = YT-1,YT-2, ...).
Se demuestra que el predictor elegido es ptimo cuando su valor esperado es igual al valor
real de prediccin condicionado a la informacin existente en el perodo T respecto a la serie que nos
ocupa; es decir:
Y T (l) = E[ Y T +l | I T ]
El error cuadrtico medio de un predictor arbitrario siempre es mayor que aquel cuyo valor
coincide con la esperanza del valor real en el perodo que estemos considerando. Esta propiedad ser
fundamental para el posterior desarrollo de la prediccin puntual.
PREDICCIN PUNTUAL
Partiendo de un modelo ARIMA sobre el que se han realizado una serie de diferenciaciones
para lograr una serie estacionaria, el planteamiento de la prediccin se hace sobre los valores reales de
la serie, por entender que es de stos de los que se quiere obtener valores a futuro. Esta circunstacia
deber ser tomada en cuenta a la hora de interpretar los subndices que acompaan a las frmulas de
este apartado.
La aparicin de rdenes autorregresivos superiores a "p" ser debida a dos circunstancias:
traslacin del modelo a perodos fuera del espacio temporal conocido y aplicacin de las expresiones
T= N - d - sD
4
TRIVEZ,F.J. y AZNAR,A.: "Mtodos de prediccin en economa" Volumen II, Anlisis de series temporales"
Pgs.240-267. Editorial Ariel, 1993.
ADE Econometra II. Modelos de Series Temporales
Pgina 28
___________________________________________________________________________________
obtenidas para WT = (1 - L)d YT directamente a los valores de la serie sin transformar (sustituir WT
por su valor en cada caso).
En su forma ms general el modelo ARIMA(p,d,q) ARIMA(P,D,Q,) S podra escribirse como:
Y T = 1 Y T -1 +2 Y T - 2 + ...+ Ps+ p +Ds+d Y T - Ps- p - sD -d +
+ + aT + 1 a T -1 + ...+ Qs+q a T - sQ -q
El desarrollo terico se hace para un modelo sin parte estacional, sin que ello suponga prdida
de generalidad en los resultados. El modelo podra escribirse entonces como:
*p (L)W t = +*q (L) at
como sabemos que WT = (1 - L)d YT , la expresin anterior se puede reescribir como:
*p (L) Y t = +*q (L) a t
donde:
(L) Y T = 1 - 1 L - 2 L2 + ...+ p +d L p +d +
(L) = 1 - 1 L + ...+ q Lq
El modelo ARIMA correspondiente sera:
Y T = 1 Y T -1 +2 Y T - 2 + ...+ p +d Y T - p - d +
+ + aT +1 a T - 1+...+ q a T - q
En la medida en que aparece la perturbacin aleatoria en la definicin de cada valor de
prediccin de la serie YT , el modelo es susceptible de ser escrito como funcin infinita de los valores
de la perturbacin aleatoria del perodo considerado y de los anteriores (no habra ms que despejar el
valor de la perturbacin aleatoria de la expresin general de un modelo ARIMA).
Para hacer prediccin hay que tener en cuenta dos supuestos inciales:
1.-
Los parmetros de las funciones presentadas son conocidos.
2.-
Las perturbaciones aleatorias se conocen en el perodo muestral y tiene carcter de
Pgina 29
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
ruido blanco para los perodos de prediccin.
Teniendo en cuenta ambos supuestos, se puede especificar un modelo ARIMA para definir el
valor de prediccin en funcin de la serie en "p" perodos anteriores (por la parte autorregresiva) y de
los "q" errores cometidos al estimar la serie en los "q" perodos previos (por la parte de las medias
mviles). Dado que son los valores reales aquellos sobre los que es verdaderamente interesante hacer
prediccin, se plantea la ecuacin de prediccin de un perodo (T+l) como:
Y(l) = 1 Y T (l - 1) +2 Y T + l -1 Y T (l) + ... +
+ l +1 Y T -l + ...+ p +d Y T +l - p -d + - l aT - l +1 a T -1 - ... - q aT +l -q
Es conveniente remarcar tres aspectos de la prediccin siguiendo esta formulacin:
- Los valores de prediccin se calculan de forma secuencial. Para hacer posible la aplicacin
de la parte autorregresiva del modelo en perodos distintos al primero de prediccin, se toma el valor
predicho en el inmediatamente anterior (YT (l-1)).
- Por la condicin necesaria para estar ante el predictor ptimo (el valor esperado de la serie
en el perodo de prediccin es igual al predicho si es ptimo), se demuestra que las perturbaciones
aleatorias empleadas en la prediccin son slo las de perodos anteriores, es decir:
aT+ j j 0
ya que se ha supuesto que en el perodo de prediccin, las perturbaciones aleatorias tienen
esperanza nula.
Para realizar las sucesivas predicciones de YT (l) tenemos que contar con unos valores para
aT , aT-1, ...aT+l-q . Como tales se tomarn:
a T + j = Y T + j - Y T + j - l (l) j 0
Las predicciones ARIMA son adaptativas y los resultados obtenidos para (T+l), con la
informacin disponible hasta el perodo T, son los mismos que las que obtendramos para el mismo
perodo tomando como base informativa hasta T-1, y aadiendo un trmino de error.
CARACTERSTICAS DE LAS PREDICCIONES REALIZADAS CON MODELOS
ARIMA
- Modelos AR(p): la prediccin tiende a (media del proceso) a medida que aumenta el
horizonte temporal de la prediccin.
- Modelos MA(q): dada la memoria limitada que caracteriza a estos procesos, la prediccin es
Pgina 30
ADE Econometra II. Modelos de Series Temporales
___________________________________________________________________________________
igual a (media del proceso) cuando el horizonte temporal de la prediccin es mayor que el orden del
proceso (q).
- Modelos ARMA(p,q): a partir de "q" perodos futuros la prediccin tie nde a (media del
proceso) a medida que aumenta el horizonte temporal de la prediccin.
- Modelos ARI(p,d) e IMA(d,q): la prediccin ya no tiende a sino que ser una lnea recta
que parte de Y(1) 88con pendiente igual a la media del proceso wT (serie resultante de las
transformaciones necesarias para hacerla estacionaria).
SELECCIN DE MODELOS
Si entendemos que una prediccin es mejor que otra cuando comete menor error, los criterios
de seleccin de modelos seran el error cuadrtico medio (ECM), error absoluto medio (EAM) y
error absoluto porcentual medio (EAPM). Estos indicadores se calcularan a perodo histrico, es
decir, se calcularan los valores que el modelo ofrece para las H ltimas observaciones y se
compararan con el valor real, del siguiente modo:
1
ECM(H) =
H
EAM(H) =
EAPM(H) =
1
H
2
T -H
l=1
1
H
1
(l)= [ y
H
| eT - H (l) |=
l =1
T - H +l
- y T - H (l) ] 2
l =1
1
H
| y
1
| eT -H (l) |
* 100 =
y T - H +l
H
l= 1
T -H +l
- y T - H (l) |
l =1
| yT -H +l - y T - H (l) |
* 100
yT - H +l
l =1
El problema es que estos indicadores no tienen en cuenta la estructura estocstica del modelo,
no informan sobre alguna caracterstica estocstic a supuesta sobre el perodo extramuestral.
ADE Econometra II. Modelos de Series Temporales
Pgina 31
___________________________________________________________________________________
ALGUNAS REFERENCIAS
AZNAR, A. Y TRIVEZ, F.J.(1993): Mtodos de Prediccin en Economa II. Anlisis de series
temporales
Editorial Ariel Economa, Barcelona 1993.
ESPASA, A. Y CANCELO, J.R. (1993): Mtodos cuantitativos para el anlisis de la coyuntura
Econmica
Alianza Editorial, Madrid 1993.
PULIDO, A. Y PREZ GARCA, J. (2001): Modelos Economtricos
Editorial Pirmide, Madrid 2001.
Enders, W. (1995). Applied Econometric Times Series.
John Wiley & Sons, Inc. United States.
Maha Casado, R (1999): Procedimientos de anlisis de la estacionariedad: Integracin y races
unitarias. Documento de trabajo Instituto de Prediccin Econmica LR Klein 99/1 (disponible en
http://www.uam.es/klein, documentos de trabajo.
You might also like
- Tabla Figuras Geometricas 5Document7 pagesTabla Figuras Geometricas 5ANGEL BLANCO100% (1)
- Pentominos para Aprender GeometríaDocument12 pagesPentominos para Aprender GeometríaManuel Lara100% (1)
- 3.metodo SimplexDocument22 pages3.metodo SimplexMadeley UgarteNo ratings yet
- Elementos Geométricos Que Integran El Alineamiento VerticalDocument6 pagesElementos Geométricos Que Integran El Alineamiento VerticalJonathan Bryan VargasNo ratings yet
- Cap 9Document18 pagesCap 9Vsqz KellyNo ratings yet
- Capitulo 07Document44 pagesCapitulo 07Priscilla Zavaleta RuizNo ratings yet
- ApuntesDocument80 pagesApuntesVsqz KellyNo ratings yet
- Lectura Descomposicic3b3n Multiplicativa y Mc3a9todos de Suavizamiento 12 Feb 2013Document41 pagesLectura Descomposicic3b3n Multiplicativa y Mc3a9todos de Suavizamiento 12 Feb 2013Vsqz KellyNo ratings yet
- 1 - 3 Andrés Pueyo, A (2008)Document69 pages1 - 3 Andrés Pueyo, A (2008)Vsqz KellyNo ratings yet
- Convocatoria FISCALIZADORES DE LOCAL DE VOTACIÓNDocument4 pagesConvocatoria FISCALIZADORES DE LOCAL DE VOTACIÓNEscuela Educacion UpaoNo ratings yet
- 01 FORMULAS PROPOSICIONALES-Parte2Document24 pages01 FORMULAS PROPOSICIONALES-Parte2Luis Fernando Huanca VargasNo ratings yet
- Plan + Taller Matemã¡tico 4Document35 pagesPlan + Taller Matemã¡tico 4Angelica GarciaNo ratings yet
- Geometria PrimeroDocument12 pagesGeometria PrimeroHugo Ricardo Flores EncarnacionNo ratings yet
- Algebra LinealDocument7 pagesAlgebra LinealLUIS ALBERTO BASTO ACOSTANo ratings yet
- Como Se Hace Curva de Lorenz y GiniDocument23 pagesComo Se Hace Curva de Lorenz y GiniEnzo Sandoval P83% (6)
- Práctica 1 (2022-I) - SoluciónDocument28 pagesPráctica 1 (2022-I) - SoluciónSARAITH BRIGHITE COCHACHI URETANo ratings yet
- Leyes de InecuacionesDocument5 pagesLeyes de Inecuacionesll_luiguiNo ratings yet
- Metodo Simplex y Metodo GraficoDocument7 pagesMetodo Simplex y Metodo GraficoBraulio SilvaNo ratings yet
- Salud Pública - Tasa y ProporciónDocument9 pagesSalud Pública - Tasa y ProporcióntarjadanamarthNo ratings yet
- Factorización Parte 2Document11 pagesFactorización Parte 2Joaquin Chila FNo ratings yet
- T1 Magnitudes Físicas 201920Document24 pagesT1 Magnitudes Físicas 201920asinNo ratings yet
- Examen de Becas Carrion Con ClavesDocument3 pagesExamen de Becas Carrion Con ClavesPre Universitaria Carrion100% (1)
- 00191Document12 pages00191DeskartesNo ratings yet
- Quiz integrales fraccionesDocument7 pagesQuiz integrales fraccionesLeydhi Tatiana Holguin VargasNo ratings yet
- Ejercicio 5Document8 pagesEjercicio 5carlos andres jaramilloNo ratings yet
- Act. 3 17-20 MayoDocument4 pagesAct. 3 17-20 MayoJesús Franco SerranoNo ratings yet
- Problemas Con Razones para Tercero de SecundariaDocument3 pagesProblemas Con Razones para Tercero de SecundariaFernandaRamirezNo ratings yet
- Práctica 6 - Gauss Jordan Descomposición LUDocument5 pagesPráctica 6 - Gauss Jordan Descomposición LUMayra Rivas VillaNo ratings yet
- Definiciones de MatrizDocument32 pagesDefiniciones de MatrizLUZ BETZABE QUISPE PEÑANo ratings yet
- Distribución Normal: guía completa sobre su representación, cálculo de probabilidades y ejemplosDocument16 pagesDistribución Normal: guía completa sobre su representación, cálculo de probabilidades y ejemplosRuben Dario Lopez GutierrezNo ratings yet
- Álgebra LinealDocument26 pagesÁlgebra LinealHersson D AlemanNo ratings yet
- Contenidos Tercer Ciclo EGBDocument4 pagesContenidos Tercer Ciclo EGBmarugifNo ratings yet
- Tarea1 Esneider JiménezDocument13 pagesTarea1 Esneider JiménezEsneider JimenezNo ratings yet
- Poblacion y MuestraDocument31 pagesPoblacion y Muestrarenzo inquilla chambillaNo ratings yet
- Señales SingularesDocument19 pagesSeñales Singularesrasel palaciosNo ratings yet
- 01 Precalculo SistemasNumericosDocument9 pages01 Precalculo SistemasNumericosbsarmiento65No ratings yet