You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Facilitate Learning Session: Prepared By: Wilmer J. DirectoDocument31 pagesFacilitate Learning Session: Prepared By: Wilmer J. DirectoJohn Wilner DirectoNo ratings yet
- Pshs Dance Syllabus 2019-2020Document4 pagesPshs Dance Syllabus 2019-2020api-235310103No ratings yet
- Python Iteration and LoopsDocument53 pagesPython Iteration and LoopsQuan ZhouNo ratings yet
- Competency-Based HR ManagementDocument35 pagesCompetency-Based HR ManagementFarhan Nurhadiana100% (1)
- Manual de Genetica Medica (2007)Document519 pagesManual de Genetica Medica (2007)Mara PitrezNo ratings yet
- 1.yontef, G. (1993) .Awareness, Dialogueandprocess - Essaysongestalttherapy - NY - TheGestaltJournal Press. Chapter6 - Gestalt Therapy - Clinical Phenomenology pp181-201.Document12 pages1.yontef, G. (1993) .Awareness, Dialogueandprocess - Essaysongestalttherapy - NY - TheGestaltJournal Press. Chapter6 - Gestalt Therapy - Clinical Phenomenology pp181-201.nikos kasiktsisNo ratings yet
- CMOS Analog Design Lecture Notes Rev 1.5L - 02!06!11Document371 pagesCMOS Analog Design Lecture Notes Rev 1.5L - 02!06!11Anonymous uspYoqENo ratings yet
- CMOS Analog Design Lecture Notes Rev 1.5L - 02!06!11Document371 pagesCMOS Analog Design Lecture Notes Rev 1.5L - 02!06!11Anonymous uspYoqENo ratings yet
- Task 2. Critical AnalysisDocument8 pagesTask 2. Critical AnalysisHulk Hijau100% (1)
- Chapter 1 Lesson 1 - The Importance of Research in Daily LifeDocument12 pagesChapter 1 Lesson 1 - The Importance of Research in Daily LifeRomeo LicarteNo ratings yet
- Subchannel and Power Allocation in OFDMA-Based Cognitive Radio NetworksDocument5 pagesSubchannel and Power Allocation in OFDMA-Based Cognitive Radio NetworksAnonymous uspYoqENo ratings yet
- Adaptive Subcarrier and Bit Allocation For Downlink OFDMA System With Proportional FairnessDocument16 pagesAdaptive Subcarrier and Bit Allocation For Downlink OFDMA System With Proportional FairnessJohn BergNo ratings yet
- Subchannel and Power Allocation For OFDMA-based Mobile Cognitive Radio NetworksDocument6 pagesSubchannel and Power Allocation For OFDMA-based Mobile Cognitive Radio NetworksAnonymous uspYoqENo ratings yet
- Imp - 2-3-1402058090-Network-IJCNWMC-ITERATIVE WATER FILLING - Samiksha - 1 - 1Document10 pagesImp - 2-3-1402058090-Network-IJCNWMC-ITERATIVE WATER FILLING - Samiksha - 1 - 1Anonymous uspYoqENo ratings yet
- Joint Pricing and Resource Allocation For OFDMA-Based Cognitive Radio SystemsDocument5 pagesJoint Pricing and Resource Allocation For OFDMA-Based Cognitive Radio SystemsAnonymous uspYoqENo ratings yet
- WWRF SIG1 Panel E3Document7 pagesWWRF SIG1 Panel E3Anonymous uspYoqENo ratings yet
- New Algorithm For Joint Subchannel and Power Allocation in Multi-Cell OFDMA-based Cognitive Radio NetworksDocument8 pagesNew Algorithm For Joint Subchannel and Power Allocation in Multi-Cell OFDMA-based Cognitive Radio NetworksAnonymous uspYoqENo ratings yet
- How To Get Started With PythonDocument8 pagesHow To Get Started With PythonAnonymous uspYoqENo ratings yet
- Intercarrier On OfdmDocument8 pagesIntercarrier On OfdmAnonymous uspYoqENo ratings yet
- Gnss Ofdm PDFDocument4 pagesGnss Ofdm PDFAnonymous uspYoqENo ratings yet
- How To Get Started With PythonDocument8 pagesHow To Get Started With PythonAnonymous uspYoqENo ratings yet
- Intercarrier On OfdmDocument8 pagesIntercarrier On OfdmAnonymous uspYoqENo ratings yet
- Python Lesson 1Document45 pagesPython Lesson 1DM TimaneNo ratings yet
- Circuit Simulation Project: Name of The ParticipantDocument5 pagesCircuit Simulation Project: Name of The ParticipantAnonymous uspYoqENo ratings yet
- Installation Sheet Spoken Tutorial Team Iit Bombay 1 The Procedure To Install Esim in Ubuntu Linux 16.04 or 14.04Document2 pagesInstallation Sheet Spoken Tutorial Team Iit Bombay 1 The Procedure To Install Esim in Ubuntu Linux 16.04 or 14.04Anonymous uspYoqENo ratings yet
- ECE3111 BJTTransistorsDocument103 pagesECE3111 BJTTransistorsAnonymous uspYoqENo ratings yet
- Dams in India PDFDocument11 pagesDams in India PDFRagaviNo ratings yet
- Cognitive Multi-Antenna T PDFDocument4 pagesCognitive Multi-Antenna T PDFAnonymous uspYoqENo ratings yet
- Cochlear RadioDocument4 pagesCochlear RadioAnonymous uspYoqENo ratings yet
- (Kevin Gurney) An Introduction To Neural Networks (B-Ok - Xyz)Document22 pages(Kevin Gurney) An Introduction To Neural Networks (B-Ok - Xyz)Anonymous uspYoqENo ratings yet
- Electronic Circuit AnalysisDocument23 pagesElectronic Circuit AnalysisAnonymous uspYoqENo ratings yet
- The Future of SDR: OMG WorkshopDocument13 pagesThe Future of SDR: OMG WorkshopAnonymous uspYoqENo ratings yet
- Design IssuesDocument12 pagesDesign IssuesAnonymous uspYoqENo ratings yet
- 5 Paragraph Essay WritingDocument3 pages5 Paragraph Essay WritingSJ AhmedNo ratings yet
- Written Communication ImportanceDocument3 pagesWritten Communication ImportanceAbdul Rehman100% (1)
- At L La Grade 8 Past PerfectDocument4 pagesAt L La Grade 8 Past PerfectJoseane de Lima MartinsNo ratings yet
- Writing Aims and ObjectivesDocument3 pagesWriting Aims and ObjectivesMohd Hanis 'Ady' IzdiharNo ratings yet
- Sales PromotionDocument12 pagesSales PromotionnandhinislvrjNo ratings yet
- CE536syllabus F2020Document5 pagesCE536syllabus F2020Pablo123No ratings yet
- HR Interview QuestionsDocument22 pagesHR Interview QuestionsShamshu ShaikNo ratings yet
- Social Science Blue PrintDocument2 pagesSocial Science Blue PrintMATWAR SINGH RAWATNo ratings yet
- How To Pass The Paper of English Language of BA Exam of Punjab UniversityDocument3 pagesHow To Pass The Paper of English Language of BA Exam of Punjab UniversitymyounisgNo ratings yet
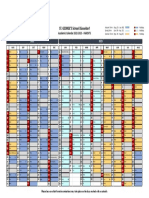
- Academic Calendar 22-23 - SGSD - PARENTS - FINALDocument1 pageAcademic Calendar 22-23 - SGSD - PARENTS - FINALfloraNo ratings yet
- General Knowledge Solved Mcqs Practice TestDocument84 pagesGeneral Knowledge Solved Mcqs Practice TestUmber Ismail82% (11)
- Kavya Latha ResumeDocument2 pagesKavya Latha ResumeKavya LathaNo ratings yet
- Etools: Using Kialo in The ClassroomDocument6 pagesEtools: Using Kialo in The ClassroombibliotecaebsbaiaoNo ratings yet
- Features of Academic LanguageDocument54 pagesFeatures of Academic LanguageAlec Palcon JovenNo ratings yet
- Investing in The 21 Century Skilled Filipino WorkforceDocument72 pagesInvesting in The 21 Century Skilled Filipino WorkforceRhemz Guino-oNo ratings yet
- Group Project BY: Fatima Ahmed Fagih, Sharifah Yahya Muharish and Taghred Mohmed MnoerDocument12 pagesGroup Project BY: Fatima Ahmed Fagih, Sharifah Yahya Muharish and Taghred Mohmed Mnoerتغريد محمدNo ratings yet
- Ecom 3 PART2 CHAP 4Document41 pagesEcom 3 PART2 CHAP 4Ulfat Raza KhanNo ratings yet
- Quantitative ResearchDocument10 pagesQuantitative ResearchAixa Dee MadialisNo ratings yet
- Epic Fails in Global Branding: Intercultural CommunicationDocument9 pagesEpic Fails in Global Branding: Intercultural Communicationrose ynqueNo ratings yet
- Understanding & Predicting E-Commerce Adoption: An Extension of The Theory of Planned BehaviorDocument13 pagesUnderstanding & Predicting E-Commerce Adoption: An Extension of The Theory of Planned BehaviorANISANo ratings yet
- Letter, Rationale and QuestionnaireDocument3 pagesLetter, Rationale and QuestionnaireLordannie John LanzoNo ratings yet
- Final Exam Gen Bio 1Document4 pagesFinal Exam Gen Bio 1Joderon NimesNo ratings yet
- Module 3: Communication in The Multicultural World: Central Luzon State UniversityDocument11 pagesModule 3: Communication in The Multicultural World: Central Luzon State UniversityJam CamaligNo ratings yet