You might also like
- Design a PWM Wave Generator and Vary the Duty CycleDocument7 pagesDesign a PWM Wave Generator and Vary the Duty CycleJafar SadiqNo ratings yet
- Synchronous Buck Converter LAB-2: Power Electronics (ECEN405)Document5 pagesSynchronous Buck Converter LAB-2: Power Electronics (ECEN405)Jafar SadiqNo ratings yet
- Abcde Fghiÿ Bfihf: FFQRRST Z (Q/) ) Z (Q/) )Document3 pagesAbcde Fghiÿ Bfihf: FFQRRST Z (Q/) ) Z (Q/) )Jafar SadiqNo ratings yet
- Daily SunnahDocument234 pagesDaily SunnahJafar SadiqNo ratings yet
- NI-North Island Site DataDocument60 pagesNI-North Island Site DataJafar SadiqNo ratings yet
- SOP - Essay GuidelinesDocument2 pagesSOP - Essay GuidelinesJafar SadiqNo ratings yet
- OR SS3 20190805 - OffersDocument3 pagesOR SS3 20190805 - OffersJafar SadiqNo ratings yet
- Assignment-1: Power System AnalysisDocument6 pagesAssignment-1: Power System AnalysisJafar SadiqNo ratings yet
- Feerule GudgaonDocument55 pagesFeerule GudgaonJafar SadiqNo ratings yet
- Risk 1: Inherent Schedule Flaws: The Top Five Software Project RisksDocument4 pagesRisk 1: Inherent Schedule Flaws: The Top Five Software Project RisksJafar Sadiq100% (1)
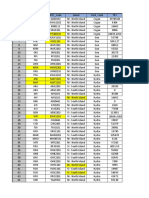
- SI NZ Power Station DataDocument490 pagesSI NZ Power Station DataJafar SadiqNo ratings yet
- SI NZ Power Station DataDocument490 pagesSI NZ Power Station DataJafar SadiqNo ratings yet
- Campus To Corporate - Issue 3 - Batch 2Document16 pagesCampus To Corporate - Issue 3 - Batch 2Jafar SadiqNo ratings yet
- AP Transco Sub Engineer Question Paper SET-ADocument16 pagesAP Transco Sub Engineer Question Paper SET-AVanitha Pillai KNo ratings yet
- Campus To Corporate - Issue 2 Batch 2 PDFDocument6 pagesCampus To Corporate - Issue 2 Batch 2 PDFJafar SadiqNo ratings yet
- Campus To Corporate - Issue 1 Batch 2Document5 pagesCampus To Corporate - Issue 1 Batch 2Jafar SadiqNo ratings yet
- Repor Mid Semt PDFDocument34 pagesRepor Mid Semt PDFJafar SadiqNo ratings yet
- Campus To Corporate - Issue 2 Batch 2 PDFDocument6 pagesCampus To Corporate - Issue 2 Batch 2 PDFJafar SadiqNo ratings yet
- OperationalDocument4 pagesOperationalJafar SadiqNo ratings yet
- Direct Recording: B.Vineeth. B130942EEDocument5 pagesDirect Recording: B.Vineeth. B130942EEJafar SadiqNo ratings yet
- Bowling Skills 2011 PDFDocument27 pagesBowling Skills 2011 PDFJafar SadiqNo ratings yet
- Cocubes Exambrochure PDFDocument4 pagesCocubes Exambrochure PDFJafar SadiqNo ratings yet
- Lesson7 SteamPowerPlantDocument33 pagesLesson7 SteamPowerPlantJafar SadiqNo ratings yet
- Abstract PDFDocument1 pageAbstract PDFJafar SadiqNo ratings yet
- Department of Electronics and CommunicationDocument1 pageDepartment of Electronics and CommunicationJafar SadiqNo ratings yet
- Welcome: Lets Gear Up For An Amazing Project !!!!!!Document13 pagesWelcome: Lets Gear Up For An Amazing Project !!!!!!Jafar SadiqNo ratings yet
- 15 Jun 1996 Male GEN No: Communication Address GATE Exam DetailsDocument1 page15 Jun 1996 Male GEN No: Communication Address GATE Exam DetailsJafar SadiqNo ratings yet
- Business Analyst Interview Questions and Answers PDFDocument5 pagesBusiness Analyst Interview Questions and Answers PDFPraveen GY75% (4)
- Speed Control of DC Motor Using DTMFDocument1 pageSpeed Control of DC Motor Using DTMFJafar SadiqNo ratings yet
- Section I - Switchgear & Substation ApparatusDocument194 pagesSection I - Switchgear & Substation Apparatushardeep08No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- CRSP ManualDocument140 pagesCRSP ManualCarlos Andrés Buenahora BallesterosNo ratings yet
- The Properties of WaterDocument6 pagesThe Properties of WaterannisyaNo ratings yet
- Tli R3.0 PDFDocument6,465 pagesTli R3.0 PDFz_sadiq25% (4)
- Pco2Document55 pagesPco2camdentownNo ratings yet
- Fisher Poistioner CatalogueDocument12 pagesFisher Poistioner CatalogueUsama IqbalNo ratings yet
- GuidewireClaimCenter Performance TestPlanDocument18 pagesGuidewireClaimCenter Performance TestPlanshanthan117No ratings yet
- Internship Report-1Document64 pagesInternship Report-1VIJAY SPNo ratings yet
- Digital Logic DesignDocument4 pagesDigital Logic DesignkiranNo ratings yet
- Vernier, Dial, and Electronic Digital Calipers: Session 3Document40 pagesVernier, Dial, and Electronic Digital Calipers: Session 3Emman Bosito100% (1)
- BPUT Colleges ListDocument7 pagesBPUT Colleges ListhirenNo ratings yet
- Shop Manual WA380-3LE SN A50001Document758 pagesShop Manual WA380-3LE SN A50001Eliecer godoy100% (2)
- Adobe Photoshop: The EditingDocument10 pagesAdobe Photoshop: The EditingMer Cjielo BalloonsNo ratings yet
- Schedule of Floor Finishes: Code Description Area (SQM) FF101 FF102Document5 pagesSchedule of Floor Finishes: Code Description Area (SQM) FF101 FF102Camille ArielNo ratings yet
- Revit Domoty 1Document1 pageRevit Domoty 1SAN RAKSANo ratings yet
- Engineering QuotesDocument10 pagesEngineering QuotesGendakenNo ratings yet
- Complex Instruction Set ComputerDocument17 pagesComplex Instruction Set ComputerkangkanpaulNo ratings yet
- Calibration of A Pressure GaugeDocument6 pagesCalibration of A Pressure GaugeThapelo100% (2)
- TF Section - MICET 2016Document21 pagesTF Section - MICET 2016Eddie D SouzaNo ratings yet
- Yasnac Mx-3 Fault Finding GuideDocument70 pagesYasnac Mx-3 Fault Finding Guidechidambaram kasi100% (1)
- Zw3d2022 Lite Vs Cadbro 2022Document4 pagesZw3d2022 Lite Vs Cadbro 2022Carlos LimaNo ratings yet
- Indian Standards As On 17.01.2004 LatestDocument19 pagesIndian Standards As On 17.01.2004 LatestSaravana KumarNo ratings yet
- Fall Protection Marking GuidelinesDocument2 pagesFall Protection Marking GuidelinescuervohijoguachoNo ratings yet
- Isolation of Caffeine from TeaDocument6 pagesIsolation of Caffeine from TeaDaisy Joyce Seroje BuslonNo ratings yet
- Construction of Multistoried Boys Hostel by Kanwarjot SinghDocument22 pagesConstruction of Multistoried Boys Hostel by Kanwarjot SinghvipinNo ratings yet
- Manage Payment Process Profiles - 1Document1 pageManage Payment Process Profiles - 1I'm RangaNo ratings yet
- (1)Document119 pages(1)Virginia Rosales OlmosNo ratings yet
- Shiela S. Portillo Ang Specification 09112021Document9 pagesShiela S. Portillo Ang Specification 09112021JR De LeonNo ratings yet
- Presentation FileDocument10 pagesPresentation FileInnoVentureCommunityNo ratings yet
- Cutting A GemDocument18 pagesCutting A Gemmobsivac100% (1)
- Goodyear Brochure Bandas-48Document1 pageGoodyear Brochure Bandas-48DavidNo ratings yet