You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Input, Output & Storage: Faculity of Computer & Mathematical ScienceDocument23 pagesInput, Output & Storage: Faculity of Computer & Mathematical ScienceAmirul AsyrafNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Dear MR Kilmer Form 5 SPM - Sample Answers - Teacher Nuha's English BlogDocument9 pagesDear MR Kilmer Form 5 SPM - Sample Answers - Teacher Nuha's English BlogAmirul Asyraf67% (3)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- CSTDocument111 pagesCSTAmirul AsyrafNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Bank Negara Kijang Emas Scholarship - CollegeLAHDocument3 pagesBank Negara Kijang Emas Scholarship - CollegeLAHAmirul AsyrafNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A.k.u.g.u.r.u.: SPM Sample EssayDocument5 pagesA.k.u.g.u.r.u.: SPM Sample EssayAmirul AsyrafNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 4:30AM-6:00AM Sunday Monday Tuesday Wednesday Thursday 3:00AM-6:00AM 3:00PM-6:00PM Friday SaturdayDocument1 page4:30AM-6:00AM Sunday Monday Tuesday Wednesday Thursday 3:00AM-6:00AM 3:00PM-6:00PM Friday SaturdayAmirul AsyrafNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Essay StoryDocument6 pagesEssay StoryAmirul AsyrafNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- How To Write A Thesis StatementDocument17 pagesHow To Write A Thesis StatementAmirul AsyrafNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Tips For JPA Scholarship Application Interview - MR Sai MunDocument13 pagesTips For JPA Scholarship Application Interview - MR Sai MunAmirul AsyrafNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Speech/Talk: SuggestionsDocument18 pagesSpeech/Talk: SuggestionsAmirul AsyrafNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Malaysia's No 12Document2 pagesMalaysia's No 12Amirul AsyrafNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grammar SPMDocument15 pagesGrammar SPMAmirul AsyrafNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Sl1m 9.0 Acceptance Form-1Document2 pagesSl1m 9.0 Acceptance Form-1Amirul AsyrafNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- More Next Blog Create Blog Sign In: Tajuk-Tajuk Penting Kertas 3 (Eksperimen)Document4 pagesMore Next Blog Create Blog Sign In: Tajuk-Tajuk Penting Kertas 3 (Eksperimen)Amirul AsyrafNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Final Quiz 2 4Document4 pagesFinal Quiz 2 4Erick GarciaNo ratings yet
- GATE 2020 Online Test Series:: Civil EngineeringDocument6 pagesGATE 2020 Online Test Series:: Civil EngineeringAvinash JhaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Mca - Took FromDocument6 pagesMca - Took Fromvijayendiran_g100% (2)
- HW04 Columbia Modern Algebra 1Document2 pagesHW04 Columbia Modern Algebra 1Cecilia WangNo ratings yet
- Eu 2Document15 pagesEu 2Ayush BhadauriaNo ratings yet
- How To Solve Fractions: Solving Quadratic EquationsDocument7 pagesHow To Solve Fractions: Solving Quadratic Equationsapi-126876773No ratings yet
- Conditional Chart PDFDocument1 pageConditional Chart PDFeduardo menesesNo ratings yet
- Summer Vacation Task HSD-2020-21 Viii & XDocument5 pagesSummer Vacation Task HSD-2020-21 Viii & XHimansu dasNo ratings yet
- Data Mininig ProjectDocument28 pagesData Mininig ProjectKarthikeyan Manimaran67% (3)
- R12 Oracle Hrms Implement and Use Fastformula: DurationDocument2 pagesR12 Oracle Hrms Implement and Use Fastformula: DurationAlochiousDassNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
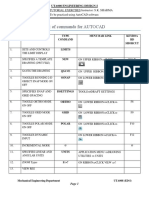
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 pagesList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelNo ratings yet
- Factorial Program in C Using FunctionDocument4 pagesFactorial Program in C Using FunctionInd KanakNo ratings yet
- Jaime Sandoval Real EstateDocument3 pagesJaime Sandoval Real EstateJaime R. SandovalNo ratings yet
- Diagnostics of Subsynchronous Vibrations in Rotating Machinery - Methodologies To Identify Potential InstabilityDocument99 pagesDiagnostics of Subsynchronous Vibrations in Rotating Machinery - Methodologies To Identify Potential InstabilityMuhammad afzalNo ratings yet
- PPAP ChecklistDocument4 pagesPPAP ChecklistHirbod HirmandNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Phys 31 Module 4Document42 pagesPhys 31 Module 4Coyzz de GuzmanNo ratings yet
- Elementary Quantitative Methods QMI1500 Semesters 1 and 2: Tutorial Letter 101/3/2021Document26 pagesElementary Quantitative Methods QMI1500 Semesters 1 and 2: Tutorial Letter 101/3/2021natashasiphokazi2015No ratings yet
- AEE 23april 430to630pmDocument26 pagesAEE 23april 430to630pmShikha SoniNo ratings yet
- Topic 68 Stress Testing and Other Risk Management ToolsDocument4 pagesTopic 68 Stress Testing and Other Risk Management ToolsSoumava PalNo ratings yet
- A K 2 0 0 e R R o R M e S S A G e e X P L A N A T I o N SDocument142 pagesA K 2 0 0 e R R o R M e S S A G e e X P L A N A T I o N SYatno GomiNo ratings yet
- House Price Estimates Based On Machine Learning AlgorithmDocument5 pagesHouse Price Estimates Based On Machine Learning AlgorithmEditor IJTSRDNo ratings yet
- How To Calculate P90 (Or Other PXX) PV Energy Yield Estimates - SolargisDocument8 pagesHow To Calculate P90 (Or Other PXX) PV Energy Yield Estimates - SolargisgoyalmanojNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Abstract Classes Versus Interfaces: C# (And Other Languages) Polymorphism Explained To Young PadawansDocument4 pagesAbstract Classes Versus Interfaces: C# (And Other Languages) Polymorphism Explained To Young Padawanssridevishinas100% (1)
- Aristo Zenon Ve Stadyum ParadoksuDocument21 pagesAristo Zenon Ve Stadyum Paradoksuaysel alagozNo ratings yet
- Interpreting Validity Indexes For Diagnostic TestsDocument10 pagesInterpreting Validity Indexes For Diagnostic TestsJudson BorgesNo ratings yet
- JFo - 3 - 4 ConvertDocument32 pagesJFo - 3 - 4 ConvertKaltuma OmarNo ratings yet
- Deterministic Phase Retrieval: A Green's Function SolutionDocument8 pagesDeterministic Phase Retrieval: A Green's Function Solutionlednakashim100% (1)
- Minevent 2006 PDFDocument12 pagesMinevent 2006 PDFJosé Manuel Berrospi CruzNo ratings yet
- Comparative Study of RP-HPLC and UV Spectrophotometric Techniques For The Simultaneous Determination of Amoxicillin and Cloxacillin in CapsulesDocument6 pagesComparative Study of RP-HPLC and UV Spectrophotometric Techniques For The Simultaneous Determination of Amoxicillin and Cloxacillin in Capsulesiabureid7460No ratings yet
- Research Process, Phases and 10 Step ModelDocument5 pagesResearch Process, Phases and 10 Step ModelJ.B ChoNo ratings yet