You might also like
- On Dyn Simulation PDFDocument44 pagesOn Dyn Simulation PDFMahendra BhaduNo ratings yet
- System Monitoring AND Control: Unit 7Document18 pagesSystem Monitoring AND Control: Unit 7vishal100% (1)
- Load SeddingDocument97 pagesLoad SeddingSe SamnangNo ratings yet
- Power Flow AnalysisDocument140 pagesPower Flow Analysisdbharanidharan3334100% (1)
- Optimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationDocument12 pagesOptimal Placement of SVC and Statcom For Voltage Stability Enhancement Under Contingency Using Cat Swarm OptimizationIJAET JournalNo ratings yet
- Representative Static Load Models For TransientDocument10 pagesRepresentative Static Load Models For TransientNirmal mehtaNo ratings yet
- Understanding Off Nominal Tap RatioDocument9 pagesUnderstanding Off Nominal Tap RatioShyamkant VasekarNo ratings yet
- Unsymmetrical Fault AnalysisDocument15 pagesUnsymmetrical Fault Analysiszeemred085100% (1)
- Siemenspti Software Psse Brochure 2017Document8 pagesSiemenspti Software Psse Brochure 2017sajuaanalsaNo ratings yet
- Full Text Analysis of Power Flow of Nigerian 330kv Grid SystemDocument8 pagesFull Text Analysis of Power Flow of Nigerian 330kv Grid SystemOgunranti RasaqNo ratings yet
- Lecture 2a. Introduction To Fault AnalysisDocument54 pagesLecture 2a. Introduction To Fault Analysiswakolesha Tadeo100% (2)
- PSSE PV AnalysisDocument19 pagesPSSE PV AnalysisHoàng Thuỳ LinhNo ratings yet
- Static Var Compensators: by Prof. C. RadhakrishnaDocument30 pagesStatic Var Compensators: by Prof. C. RadhakrishnaathbeljoeNo ratings yet
- (2 2) Short Circuit CalculationDocument38 pages(2 2) Short Circuit CalculationElectro Tractrix100% (1)
- PRM DesignGuideComplete v1Document257 pagesPRM DesignGuideComplete v1Sunil SinghNo ratings yet
- Dynamic Load Modeling - PSSE - Gyawali - S - T - 2020Document96 pagesDynamic Load Modeling - PSSE - Gyawali - S - T - 2020wenbin shuNo ratings yet
- Parallel Con - For TransformersDocument6 pagesParallel Con - For Transformersmahmoud shalabiNo ratings yet
- Model CONS Con Value Con DescriptionDocument4 pagesModel CONS Con Value Con DescriptionIBA PUNo ratings yet
- PSSE Fault Intro InstructionsDocument6 pagesPSSE Fault Intro InstructionsCarlos RodasNo ratings yet
- Power System Security: Viren B. PandyaDocument23 pagesPower System Security: Viren B. PandyavirenpandyaNo ratings yet
- Parallel Operation of TransformersDocument10 pagesParallel Operation of TransformersMMK29100% (1)
- Eee 205-W1Document24 pagesEee 205-W1mahamudul hasan100% (1)
- Power System Analysis QuestionsDocument5 pagesPower System Analysis QuestionsMusaddiq MuhammadNo ratings yet
- Power System Analysis Lab 5Document13 pagesPower System Analysis Lab 5divanteNo ratings yet
- Contingency Analysis of Power Systems PDFDocument4 pagesContingency Analysis of Power Systems PDFbenitogaldos19gmail.comNo ratings yet
- W-2-Day-3-C - Angle StabilityDocument17 pagesW-2-Day-3-C - Angle StabilityKASHIFNo ratings yet
- Study of Power System Security in Indian Utility 62 Bus SystemDocument10 pagesStudy of Power System Security in Indian Utility 62 Bus SystempjNo ratings yet
- System StabilityDocument32 pagesSystem Stabilityelectron teslaNo ratings yet
- Power System Security: Contingency AnalysisDocument24 pagesPower System Security: Contingency AnalysiscdkNo ratings yet
- W 2 Day 1A PV Curve - 2Document9 pagesW 2 Day 1A PV Curve - 2hung nguyenNo ratings yet
- Ground Fault LocationDocument8 pagesGround Fault Locationzbyszko201234No ratings yet
- Programacion Atp-EmtpDocument9 pagesProgramacion Atp-EmtpGennaroNo ratings yet
- Power System EquivalentsDocument6 pagesPower System Equivalentsdallisrinivas14No ratings yet
- Detailed Modeling of CIGRÉ HVDC BenchmarkDocument18 pagesDetailed Modeling of CIGRÉ HVDC Benchmarkpeloduro1010No ratings yet
- Switchgear Battery Sizing by HandDocument4 pagesSwitchgear Battery Sizing by HandNia KurniawatiNo ratings yet
- Role of Power System StabilizerDocument3 pagesRole of Power System StabilizerAbdel-Rahman Saifedin ArandasNo ratings yet
- Load Flow AnalysisDocument12 pagesLoad Flow AnalysisHendra Dwi RamadhanNo ratings yet
- Superimposed Components Based Sub-Cycle Protection of Transmission LinesDocument6 pagesSuperimposed Components Based Sub-Cycle Protection of Transmission LinesFabien CallodNo ratings yet
- Micom Agile P841: Grid SolutionsDocument8 pagesMicom Agile P841: Grid SolutionsTaQuangDucNo ratings yet
- Voltage ControlDocument25 pagesVoltage Controlbenson215100% (1)
- EirGrid Simulation RequirementsDocument52 pagesEirGrid Simulation Requirementstongai chigariro100% (1)
- NERC Protection System Protection Fundamentals Public 060210Document55 pagesNERC Protection System Protection Fundamentals Public 060210srinivasaphanikiranNo ratings yet
- Analysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude ControlDocument8 pagesAnalysis of An Ac To DC Voltage Source Converter Using PWM With Phase and Amplitude Controleubis_machado4370No ratings yet
- Protection System VPH UV OV of 062310Document55 pagesProtection System VPH UV OV of 062310cesarchiletNo ratings yet
- W-1-Day-4-D - Symmetrical ComponentsDocument18 pagesW-1-Day-4-D - Symmetrical ComponentsKASHIF100% (1)
- Chapter 7 Lecture PowerPointDocument33 pagesChapter 7 Lecture PowerPointkyrwel100% (1)
- Short Circuit Lecture Using EDSA-ETAP-PSSE-MatlabDocument38 pagesShort Circuit Lecture Using EDSA-ETAP-PSSE-MatlabTed LopezNo ratings yet
- Brazilian Experience With System Protection SchemesDocument9 pagesBrazilian Experience With System Protection SchemesJorge LeaoNo ratings yet
- BSTP Dyn Istanbul 20110518Document25 pagesBSTP Dyn Istanbul 20110518osubasic799100% (1)
- Poweremt: Protection System Analysis and Testing Using Electro-Magnetic Transients SimulationDocument48 pagesPoweremt: Protection System Analysis and Testing Using Electro-Magnetic Transients Simulationdebajyoti ghoshNo ratings yet
- 3-Power Flow SolutionDocument36 pages3-Power Flow SolutionRajesh Prasad100% (1)
- Multilin: Synchronism Check EquipmentDocument26 pagesMultilin: Synchronism Check EquipmentĐức Nguyễn XuânNo ratings yet
- Transient Stability Improvement of SMIB With Unified Power Flow ControllerDocument78 pagesTransient Stability Improvement of SMIB With Unified Power Flow ControllerRagesh OdungattuNo ratings yet
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- Testing of Distance Protection Relays: NtroductionDocument15 pagesTesting of Distance Protection Relays: NtroductionPetrit KastratiNo ratings yet
- Over MatlabDocument8 pagesOver MatlabPriyesh GuptaNo ratings yet
- Siemens Digsi 5 EngineeringDocument144 pagesSiemens Digsi 5 EngineeringYM6BNo ratings yet
- Transmission Line Protection: Benefits of Line Current DifferentialDocument17 pagesTransmission Line Protection: Benefits of Line Current DifferentialYM6BNo ratings yet
- Microscada Pro Sys 600C 2.93: Product GuideDocument44 pagesMicroscada Pro Sys 600C 2.93: Product GuideYM6BNo ratings yet
- Virtual Power Plant For Grid Services Using Iec61850Document11 pagesVirtual Power Plant For Grid Services Using Iec61850YM6B100% (1)
- Flyer - PCS-915ID Distributed Busbar ProtectionDocument3 pagesFlyer - PCS-915ID Distributed Busbar ProtectionYM6BNo ratings yet
- Flyer - PCS-902 Line Distance ProtectionDocument3 pagesFlyer - PCS-902 Line Distance ProtectionYM6BNo ratings yet
- SCADA of The Future: Kelly DoranDocument32 pagesSCADA of The Future: Kelly DoranYM6BNo ratings yet
- Alstom Mobile Substations BrochureDocument7 pagesAlstom Mobile Substations BrochureYM6BNo ratings yet
- 461 - Telecommunication Service ProvisioningDocument188 pages461 - Telecommunication Service ProvisioningYM6BNo ratings yet
- Bab 2 - Coal Handling PlantDocument10 pagesBab 2 - Coal Handling PlantmasgrahaNo ratings yet
- Iso 10245-2-2014 PDFDocument16 pagesIso 10245-2-2014 PDFalejandroNo ratings yet
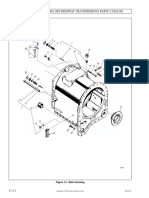
- Allison 5000/6000 Series Off-Highway Transmissions Parts CatalogDocument3 pagesAllison 5000/6000 Series Off-Highway Transmissions Parts CatalogMaya OlmecaNo ratings yet
- Amazon Product Review - Ipynb - ColaboratoryDocument7 pagesAmazon Product Review - Ipynb - ColaboratoryThomas ShelbyNo ratings yet
- pdf24 - Converted 4Document18 pagespdf24 - Converted 4Sai VamshiNo ratings yet
- Safety Culture in Nuclear InstalationsDocument98 pagesSafety Culture in Nuclear InstalationschrissbansNo ratings yet
- Ahnlab Monthly Security Report Security Trend - November 2012 Special Feature: Malicious Code AnalysisDocument32 pagesAhnlab Monthly Security Report Security Trend - November 2012 Special Feature: Malicious Code AnalysisChirri CorpNo ratings yet
- Week3 Modulation BasicsDocument30 pagesWeek3 Modulation BasicsAbdulrahman AlsomaliNo ratings yet
- Construction Planning and SchedulingDocument11 pagesConstruction Planning and SchedulingAWAKSEORANGNo ratings yet
- Applied Information Processing Systems 2022Document588 pagesApplied Information Processing Systems 2022Med KH100% (1)
- SRAN13.1&15.0 NSA Networking Based On EPC-20180905Document24 pagesSRAN13.1&15.0 NSA Networking Based On EPC-20180905Mohammed Babar Ahmed100% (2)
- Network Design CookbookDocument412 pagesNetwork Design Cookbookanon_73609093763% (8)
- Engineering Iot Combine PDF Nptel IotDocument185 pagesEngineering Iot Combine PDF Nptel IotAshishNo ratings yet
- Rate Monotonic Scheduling: Group - 12Document19 pagesRate Monotonic Scheduling: Group - 12Brajmohan kr SinghNo ratings yet
- Proposal - Axis BankDocument51 pagesProposal - Axis BankRahul S DevNo ratings yet
- Ag ExtensionDocument101 pagesAg ExtensionWaren LlorenNo ratings yet
- Course Outline: ABE 105 - AB Power EngineeringDocument2 pagesCourse Outline: ABE 105 - AB Power EngineeringKaren Joy BabidaNo ratings yet
- Ge12ti Co Gen-GDocument2 pagesGe12ti Co Gen-GTilok DasNo ratings yet
- Nursing Information System Team Information TechnologyDocument8 pagesNursing Information System Team Information TechnologyCzarina Mae Quinones TadeoNo ratings yet
- Lc1f2254 Datasheet WW En-WwDocument3 pagesLc1f2254 Datasheet WW En-Wwramiz razaNo ratings yet
- Compare ISO 9001 AS9100cDocument1 pageCompare ISO 9001 AS9100cViswanathan Srk100% (1)
- AaiPe NeoBankingDocument17 pagesAaiPe NeoBankingPuneet SethiNo ratings yet
- As 2159 2009 Piling Design and InstallationDocument9 pagesAs 2159 2009 Piling Design and InstallationKinson LowNo ratings yet
- TutorialsDocument17 pagesTutorialsnandini chinthalaNo ratings yet
- Sustainable Finance Esg Integration SolutionDocument5 pagesSustainable Finance Esg Integration SolutionRISHABH RAJ JAINNo ratings yet
- A Levels Computing 9691 Revision Notes PDFDocument14 pagesA Levels Computing 9691 Revision Notes PDFmelina_elinaNo ratings yet
- 1 Question Bank For Unit 1Document11 pages1 Question Bank For Unit 1Ajay KareNo ratings yet
- Nokia TDM Migration White Paper enDocument28 pagesNokia TDM Migration White Paper enHarshitShuklaNo ratings yet
- A Comparative Study On Mobile Platforms (Android vs. IOS) : Smt. Annapurna, K.V.S. Pavan Teja, Dr. Y. Satyanarayana MurtyDocument7 pagesA Comparative Study On Mobile Platforms (Android vs. IOS) : Smt. Annapurna, K.V.S. Pavan Teja, Dr. Y. Satyanarayana MurtyAravindhNo ratings yet
- PROJECT NAME: Construction of 380/33kV SWPC 3A BSP: S.No. Item Description Name of Supplier FAT RemarksDocument2 pagesPROJECT NAME: Construction of 380/33kV SWPC 3A BSP: S.No. Item Description Name of Supplier FAT RemarksshahzebNo ratings yet