You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Matlab Command FunctionsDocument17 pagesMatlab Command FunctionsbehroozfNo ratings yet
- Normalized Impedance and Admittance Coordinates: Name Title Dwg. NoDocument1 pageNormalized Impedance and Admittance Coordinates: Name Title Dwg. NoRadiah HamdahNo ratings yet
- Transmission Line Different Types of Transmission Line Transmission Line Per Unit Length Parameters Telegrapher Equation Power FlowDocument15 pagesTransmission Line Different Types of Transmission Line Transmission Line Per Unit Length Parameters Telegrapher Equation Power FlowdiptodevilNo ratings yet
- EEE 402 Exp4Document6 pagesEEE 402 Exp4diptodevilNo ratings yet
- Electrostatic ExamplesDocument36 pagesElectrostatic ExamplesdiptodevilNo ratings yet
- Naca 4314 Closed TrailDocument2 pagesNaca 4314 Closed TraildiptodevilNo ratings yet
- 2 A Ring of Charge PDFDocument3 pages2 A Ring of Charge PDFdiptodevilNo ratings yet
- TFE4120 Electromagnetics - Crash CourseDocument7 pagesTFE4120 Electromagnetics - Crash CoursediptodevilNo ratings yet
- 2 A Ring of ChargeDocument3 pages2 A Ring of ChargediptodevilNo ratings yet
- Problem 4.4: If The Line Charge Density Is Given by (MC/M), Find The Total Charge Distributed On The Y-Axis From yDocument1 pageProblem 4.4: If The Line Charge Density Is Given by (MC/M), Find The Total Charge Distributed On The Y-Axis From yEric KialNo ratings yet
- 4-1 10Document1 page4-1 10diptodevilNo ratings yet
- 4-1 13 PDFDocument1 page4-1 13 PDFdiptodevilNo ratings yet
- Coordinate Transformation Formula Sheet PDFDocument6 pagesCoordinate Transformation Formula Sheet PDFdiptodevilNo ratings yet
- Image Charge TheoryDocument4 pagesImage Charge TheoryEd DeldelNo ratings yet
- Problem 4.4: If The Line Charge Density Is Given by (MC/M), Find The Total Charge Distributed On The Y-Axis From yDocument1 pageProblem 4.4: If The Line Charge Density Is Given by (MC/M), Find The Total Charge Distributed On The Y-Axis From yEric KialNo ratings yet
- Co OrdinateDocument11 pagesCo OrdinatediptodevilNo ratings yet
- Field and VectoresDocument27 pagesField and VectoresMyameSirameNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- List of NavaidsDocument14 pagesList of Navaidstharesh nicholasNo ratings yet
- Aircraft Specification Sheet PDFDocument7 pagesAircraft Specification Sheet PDFThar LattNo ratings yet
- Albatros Leporelo L39 PDFDocument24 pagesAlbatros Leporelo L39 PDFEstevam Gomes de Azevedo100% (3)
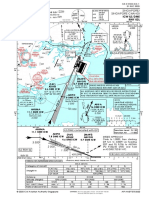
- Instrument Approach Chart - Icao: WSD34 500ft ALT GND Wsr6 200ft ALT GNDDocument1 pageInstrument Approach Chart - Icao: WSD34 500ft ALT GND Wsr6 200ft ALT GNDabang fayyadNo ratings yet
- A330 Rnav Gps ApproachDocument9 pagesA330 Rnav Gps ApproachAbdelmoneim TaynazNo ratings yet
- Pro Line II Generic Trainig CourseDocument11 pagesPro Line II Generic Trainig CourseLouie FeytNo ratings yet
- How To Fly IFRDocument306 pagesHow To Fly IFRbsilvasquadNo ratings yet
- ILS ManualDocument323 pagesILS ManualArGee Alarcón100% (3)
- Installation Manual: Distance Measuring EquipmentDocument62 pagesInstallation Manual: Distance Measuring Equipmentg-opvmNo ratings yet
- Ad 2. Aerodromes Vebs Ad 2.1 Aerodrome Location Indicator and NameDocument14 pagesAd 2. Aerodromes Vebs Ad 2.1 Aerodrome Location Indicator and Namevikram prakashNo ratings yet
- 03 DmeDocument35 pages03 DmeYadanaNo ratings yet
- VDADocument19 pagesVDAbkakourNo ratings yet
- 1753-Wask Ad 2-1 SD 2-6Document6 pages1753-Wask Ad 2-1 SD 2-6Danny SupriyadiNo ratings yet
- Take Off BriefDocument25 pagesTake Off BriefKhurram Naseem100% (1)
- CVFDR Parameters (SDS 31-32-10-4)Document28 pagesCVFDR Parameters (SDS 31-32-10-4)tangyuNo ratings yet
- Elenco Apparati AvioniciDocument53 pagesElenco Apparati AvioniciStrawichDaniel25% (4)
- "Azərbaycan Hava Yollari" CJSC National Aviation AcademyDocument7 pages"Azərbaycan Hava Yollari" CJSC National Aviation AcademyAvionics GroupNo ratings yet
- RADIONAVDocument7 pagesRADIONAVÁlvaro De La Cuadra VaqueroNo ratings yet
- Ace The Pilot Technical Interview Short Version For DublinDocument26 pagesAce The Pilot Technical Interview Short Version For DublinMaksat Kadyrov100% (6)
- TDFM 9300Document39 pagesTDFM 9300Jeane MarquesNo ratings yet
- Acn MCQDocument52 pagesAcn MCQBadal MachchharNo ratings yet
- Edlp Ils06Document1 pageEdlp Ils06Ggg RyfhNo ratings yet
- VHHXDocument20 pagesVHHXahNo ratings yet
- The Interscan LDBDocument2 pagesThe Interscan LDBgregNo ratings yet
- Aircraft Avionics & Autopilot System - : Midterm CoverageDocument75 pagesAircraft Avionics & Autopilot System - : Midterm CoverageSantos MaineNo ratings yet
- Epll ChartsDocument3 pagesEpll ChartsjazzmanPLNo ratings yet
- CAE Oxford Aviation Academy 030 Flight Performance Planning 2 Flight Planning and Monitoring ATPL Ground Training Series 2014 PDFDocument340 pagesCAE Oxford Aviation Academy 030 Flight Performance Planning 2 Flight Planning and Monitoring ATPL Ground Training Series 2014 PDFexpairtise100% (22)
- V5585 N229AR WAPL WIHH: This Flight Plan Has Been Calculated With The Latest Winds DataDocument28 pagesV5585 N229AR WAPL WIHH: This Flight Plan Has Been Calculated With The Latest Winds DataFendi Ingin PulangNo ratings yet
- AMAC Aerospace Mini Tech Spec PDFDocument16 pagesAMAC Aerospace Mini Tech Spec PDFFabio BurgosNo ratings yet
- Basic Guide To Advanced Navigation: (Principes de La Navigation Avancée) 2 EditionDocument88 pagesBasic Guide To Advanced Navigation: (Principes de La Navigation Avancée) 2 EditionSatish Kumar100% (6)