You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- British Maritime DoctrineDocument263 pagesBritish Maritime Doctrinerakibbn75% (4)
- Not One Inch EastwardDocument23 pagesNot One Inch EastwardTonyCalUSM100% (1)
- Bayonets - Bayonet CarriagesDocument137 pagesBayonets - Bayonet Carriagesgustavo12100% (3)
- Close Quarter Battle PresentationDocument23 pagesClose Quarter Battle PresentationAlberca Luffy Romar100% (3)
- Neutrosophic Crisp Bi-Topological SpacesDocument8 pagesNeutrosophic Crisp Bi-Topological SpacesMia AmaliaNo ratings yet
- Smarandache Curves According To Q-Frame in Euclidean 3-SpaceDocument2 pagesSmarandache Curves According To Q-Frame in Euclidean 3-SpaceMia AmaliaNo ratings yet
- Fundamental Homomorphism Theorems For Neutrosophic Extended Triplet GroupsDocument14 pagesFundamental Homomorphism Theorems For Neutrosophic Extended Triplet GroupsMia AmaliaNo ratings yet
- On Smarandache Curves of Involute-Evolute Curve According To Frenet Frame in Minkowski 3-SpaceDocument1 pageOn Smarandache Curves of Involute-Evolute Curve According To Frenet Frame in Minkowski 3-SpaceMia AmaliaNo ratings yet
- Different Methodologies in Treating UncertaintyDocument7 pagesDifferent Methodologies in Treating UncertaintyMia AmaliaNo ratings yet
- An Intelligent Medical Decision Support SystemDocument12 pagesAn Intelligent Medical Decision Support SystemMia AmaliaNo ratings yet
- General Problems of Science For PedestrianDocument34 pagesGeneral Problems of Science For PedestrianMia AmaliaNo ratings yet
- The Transfer of Management Knowledge To China: Building Learning Communities Rather Than Translating Western Textbooks?Document11 pagesThe Transfer of Management Knowledge To China: Building Learning Communities Rather Than Translating Western Textbooks?Mia AmaliaNo ratings yet
- TOPSIS Approach Using Interval Neutrosophic Sets For Personnel SelectionDocument8 pagesTOPSIS Approach Using Interval Neutrosophic Sets For Personnel SelectionMia AmaliaNo ratings yet
- OSRIC OA - Class, SamuraiDocument4 pagesOSRIC OA - Class, SamuraiJohnny BNo ratings yet
- Global WarmingDocument4 pagesGlobal WarmingAshutosh SarkarNo ratings yet
- Ironsworn Assets (Printed Deck)Document110 pagesIronsworn Assets (Printed Deck)Deris Khariza100% (1)
- Marketing Strategy of AlexanderDocument27 pagesMarketing Strategy of AlexanderDevayani MNo ratings yet
- My ResumeDocument6 pagesMy Resumemacrhey_machoNo ratings yet
- ملخص العلاقاتDocument14 pagesملخص العلاقاتRaghad BabNo ratings yet
- STP 9-94F13-SM-TGDocument124 pagesSTP 9-94F13-SM-TG"Rufus"No ratings yet
- Competitive Exams For Jobs After 10thDocument1 pageCompetitive Exams For Jobs After 10thharpal_abhNo ratings yet
- World War 1 and 2 WorksheetDocument3 pagesWorld War 1 and 2 Worksheetapi-262045802No ratings yet
- Pre Conference Final ProgDocument2 pagesPre Conference Final ProgkeithlyndNo ratings yet
- Pactul Ribentrop MolotovDocument7 pagesPactul Ribentrop MolotovTifui CatalinaNo ratings yet
- Aviation Classics 5 - English Electric LightningDocument132 pagesAviation Classics 5 - English Electric LightningCem Avci100% (2)
- Janavaranche Aajar Ani AushadheDocument6 pagesJanavaranche Aajar Ani AushadheHarsh GoyalNo ratings yet
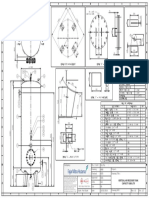
- Detail Ga Drawing Tangki 5000 LDocument1 pageDetail Ga Drawing Tangki 5000 LrodonganjayaNo ratings yet
- Star Wars BooksDocument10 pagesStar Wars BookssairvaNo ratings yet
- Outer Ring: Flash HiderDocument6 pagesOuter Ring: Flash HiderPhong LêNo ratings yet
- Chernivtsi Region: Bila Krynytsa (Hlybovytskyi District)Document8 pagesChernivtsi Region: Bila Krynytsa (Hlybovytskyi District)gabriella_popovichNo ratings yet
- Bodh Tatha Abhibyakti PDFDocument3 pagesBodh Tatha Abhibyakti PDFLàXsun ShrèsthàNo ratings yet
- ListeningDocument2 pagesListeningYaiza Almengló OrtegaNo ratings yet
- Movie AnalysisDocument1 pageMovie AnalysisKohlen SusonNo ratings yet
- UPSC Civil Services Examination: UPSC Notes (GS-I) Topic: Mauryan Administration (Ancient Indian History For UPSC)Document3 pagesUPSC Civil Services Examination: UPSC Notes (GS-I) Topic: Mauryan Administration (Ancient Indian History For UPSC)Gaurav SindhiyaNo ratings yet
- AlgebraforBeginners 10013204Document349 pagesAlgebraforBeginners 10013204Venu Gopal100% (1)
- Easy Selection XenoialaDocument274 pagesEasy Selection XenoialaFaylasoof100% (1)
- Antike II - Rules in Brief v2Document2 pagesAntike II - Rules in Brief v2Thomas YapNo ratings yet
- First Sino-Japanese War PDFDocument20 pagesFirst Sino-Japanese War PDFdzimmer60% (1)
- FM 7-8 Infantry Rifle Platoon and SquadDocument411 pagesFM 7-8 Infantry Rifle Platoon and SquadJared A. Lang75% (4)