You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Strength of Materials 4th Edition by Pytel and SingerDocument5 pagesStrength of Materials 4th Edition by Pytel and SingerIan Jimbo Constantino82% (11)
- Design of Shear KeyDocument12 pagesDesign of Shear KeyMEP100% (2)
- Spreader Beam: ASME BTH-1: InputsDocument17 pagesSpreader Beam: ASME BTH-1: InputsGokul AmarnathNo ratings yet
- Mineral Exploration Drilling - Code of PracticeDocument68 pagesMineral Exploration Drilling - Code of Practicelaxman_mbm100% (1)
- Nonel ManualDocument56 pagesNonel Manuallaxman_mbmNo ratings yet
- Axial Flow Fans For Underground MinesDocument25 pagesAxial Flow Fans For Underground Mineslaxman_mbm100% (1)
- Slope StabilityDocument25 pagesSlope Stabilitylaxman_mbmNo ratings yet
- Coal Bed MethaneDocument40 pagesCoal Bed Methanelaxman_mbmNo ratings yet
- Computing Rock Mass Behavior by RQDDocument26 pagesComputing Rock Mass Behavior by RQDlaxman_mbmNo ratings yet
- Deep Sea Metallic Deposits and Their Mining TechniquesDocument36 pagesDeep Sea Metallic Deposits and Their Mining Techniqueslaxman_mbmNo ratings yet
- Deep Mine Ventilation Seinar - 1455619238949 - 1455619794245Document26 pagesDeep Mine Ventilation Seinar - 1455619238949 - 1455619794245laxman_mbmNo ratings yet
- Comparison of Shallow Foundation Design Using Eurocode 7 and Polish StandardDocument6 pagesComparison of Shallow Foundation Design Using Eurocode 7 and Polish StandardPTchongNo ratings yet
- Seismci Design Criteria For 5 Storey Building in PhilippinesDocument9 pagesSeismci Design Criteria For 5 Storey Building in PhilippinesdantevariasNo ratings yet
- UU Triaxial TestDocument11 pagesUU Triaxial Testprinces_anaNo ratings yet
- (Final) Gravity Dam Hand CalculationDocument5 pages(Final) Gravity Dam Hand CalculationYohannes TsegayeNo ratings yet
- Failure PDFDocument101 pagesFailure PDFManuel GasparNo ratings yet
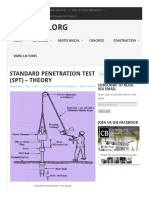
- Standard Penetration Test (SPT) - TheoryDocument5 pagesStandard Penetration Test (SPT) - Theorya769No ratings yet
- Long Exam 2: E.S. 13 - Mechanics of Deformable Bodies I 2 Semester, A.Y. 2010-2011Document2 pagesLong Exam 2: E.S. 13 - Mechanics of Deformable Bodies I 2 Semester, A.Y. 2010-2011Junhong BapNo ratings yet
- 3 D Truss Exercise 6.18-Static 3-1 Right ResultDocument16 pages3 D Truss Exercise 6.18-Static 3-1 Right Resultmahfuzul_haqueNo ratings yet
- Transverse and Stresses in Beam: Loading On BeamsDocument38 pagesTransverse and Stresses in Beam: Loading On BeamsDr. BIBIN CHIDAMBARANATHANNo ratings yet
- Design of Pier For Minor Bridge at Ch. 11+120Document69 pagesDesign of Pier For Minor Bridge at Ch. 11+120siddharth yadavNo ratings yet
- Steel Column Analysis-Code Check: Stress Code Check Per AISC 9th Edition Manual (ASD)Document1 pageSteel Column Analysis-Code Check: Stress Code Check Per AISC 9th Edition Manual (ASD)dante mortelNo ratings yet
- Appendix B: Aashto/Pci Standard ProductsDocument3 pagesAppendix B: Aashto/Pci Standard ProductsHossam MagdyNo ratings yet
- 6.9 Materials For Springs: ModelDocument3 pages6.9 Materials For Springs: ModelAli PuadNo ratings yet
- Studies of The Long Term Behaviour of GRE Pipe Under Bi-Axial StressDocument14 pagesStudies of The Long Term Behaviour of GRE Pipe Under Bi-Axial StressDuri DumaiNo ratings yet
- Seismic Haard Kosovo - MShemsiDocument12 pagesSeismic Haard Kosovo - MShemsitishebraNo ratings yet
- Marine Propulsion System Failures-A Review: Marine Science and EngineeringDocument14 pagesMarine Propulsion System Failures-A Review: Marine Science and EngineeringDavid NuñezNo ratings yet
- NX Nastran Advanced Nonlinear - Solution 601-701Document3 pagesNX Nastran Advanced Nonlinear - Solution 601-701Rubén GabrielNo ratings yet
- Epm 952 As TPDocument2 pagesEpm 952 As TPDaniel VillaflorNo ratings yet
- Bharat Khanal EditDocument15 pagesBharat Khanal Editnabin nitNo ratings yet
- 7 Linear ElasticityDocument153 pages7 Linear ElasticityRabindraSubediNo ratings yet
- Strain-Based Fatigue Data For Ti-6Al-4V ELI UnderDocument4 pagesStrain-Based Fatigue Data For Ti-6Al-4V ELI UnderAwan AJaNo ratings yet
- Structural Design Focusproblems1 2019Document14 pagesStructural Design Focusproblems1 2019Rommel RaferNo ratings yet
- Analysis On Stress State of Box-Girder Web Under PDocument9 pagesAnalysis On Stress State of Box-Girder Web Under PKinan FauzanNo ratings yet
- Dissertation Vinh 2010Document245 pagesDissertation Vinh 2010casanovavnNo ratings yet
- Design & Detailing of Water Retaining Structures & Pre Cast Water Tank Floor SystemDocument69 pagesDesign & Detailing of Water Retaining Structures & Pre Cast Water Tank Floor SystemAnonymous ciKyr0t94% (18)
- Yield CriterionDocument36 pagesYield CriterionravindrababugNo ratings yet
- STRUCTURAL ANALYSIS Report Janak Raj GhimireDocument60 pagesSTRUCTURAL ANALYSIS Report Janak Raj GhimireLilu ThapaNo ratings yet