You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
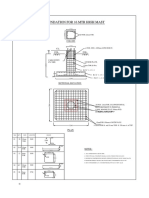
- High Mast Foundation Layout - DiagramDocument8 pagesHigh Mast Foundation Layout - DiagramTanveer Ahmad89% (9)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Notes On Structural Analysis of Composite Shell StructuresDocument86 pagesNotes On Structural Analysis of Composite Shell Structureskhayat100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Site and Temporary WorksDocument11 pagesSite and Temporary Worksbaluku samuelNo ratings yet
- Concrete BasicsDocument27 pagesConcrete BasicsPradeepLokhandeNo ratings yet
- BCM-V U2 Part-B 19-07-2021Document55 pagesBCM-V U2 Part-B 19-07-2021hyperloop707 designNo ratings yet
- Site PlanningDocument69 pagesSite PlanningSAKET TYAGI100% (1)
- Development About Composite Homogenization in Static and in Dynamic - Application To UD Composite MaterialsDocument57 pagesDevelopment About Composite Homogenization in Static and in Dynamic - Application To UD Composite MaterialskhayatNo ratings yet
- Mobile Crane or Boom Truck Checklist Rev4Document2 pagesMobile Crane or Boom Truck Checklist Rev4maomontes100% (2)
- Project Work-2 For - Interior Design and Retail ClientDocument59 pagesProject Work-2 For - Interior Design and Retail ClientGursharan SinghNo ratings yet
- 1716,1734,1751,1769 - Highrise and Earthquake Resistant ConstructionDocument34 pages1716,1734,1751,1769 - Highrise and Earthquake Resistant ConstructionFAB RAHINo ratings yet
- Tier 1 Bridge Heavy Load Assessment Criteria - 2013 (Main Road)Document85 pagesTier 1 Bridge Heavy Load Assessment Criteria - 2013 (Main Road)yyanan1118No ratings yet
- Notes On DynamicsDocument214 pagesNotes On Dynamicskhayat100% (1)
- Barringer4e 05 ModDocument9 pagesBarringer4e 05 ModkhayatNo ratings yet
- FEM TerminologyDocument15 pagesFEM TerminologykhayatNo ratings yet
- Barringer4e 03 ModDocument36 pagesBarringer4e 03 ModkhayatNo ratings yet
- The SNL100-01 Blade - Carbon Design Studies For The Sandia 100m BladeDocument26 pagesThe SNL100-01 Blade - Carbon Design Studies For The Sandia 100m BladekhayatNo ratings yet
- Lec3 - Composite Lamina Stiffness AnalysisDocument21 pagesLec3 - Composite Lamina Stiffness AnalysiskhayatNo ratings yet
- Barringer4e 02 ModDocument14 pagesBarringer4e 02 ModkhayatNo ratings yet
- Composites Handouts 2008-1Document91 pagesComposites Handouts 2008-1khayatNo ratings yet
- Yield Criteria: Submitted byDocument5 pagesYield Criteria: Submitted bykhayatNo ratings yet
- System Identification: Black Box: Robert GreplDocument36 pagesSystem Identification: Black Box: Robert GreplkhayatNo ratings yet
- Crude Test: by Khazar HayatDocument27 pagesCrude Test: by Khazar HayatkhayatNo ratings yet
- Comparative Review Study On Elastic Properties Modelling For UD Composite MaterialsDocument19 pagesComparative Review Study On Elastic Properties Modelling For UD Composite MaterialskhayatNo ratings yet
- Sputnik Investigation PDFDocument71 pagesSputnik Investigation PDFkhayatNo ratings yet
- StratosDocument4 pagesStratosCelith Rossy Inga PeñaNo ratings yet
- Forged Steel Globe Valve 800 15NB To 50NBDocument1 pageForged Steel Globe Valve 800 15NB To 50NBpriyanka GNo ratings yet
- Methodology Dandeli UGDDocument2 pagesMethodology Dandeli UGDPrathyaksh ShettyNo ratings yet
- Installation Procedure EQOBRUSH For Heat Exchangers and CondensersDocument16 pagesInstallation Procedure EQOBRUSH For Heat Exchangers and CondensersWatco GroupNo ratings yet
- Plumbing (AutoRecovered)Document3 pagesPlumbing (AutoRecovered)nicsNo ratings yet
- The Second Industrial Revolution 1850 - 1914 - 5 JULY 2022Document41 pagesThe Second Industrial Revolution 1850 - 1914 - 5 JULY 2022Jason KDNo ratings yet
- 2014.03.27 Volume 2 Design ENDocument134 pages2014.03.27 Volume 2 Design ENSalman KaziNo ratings yet
- Shell Gadus S2 A320 2Document2 pagesShell Gadus S2 A320 2Raden ArdyNo ratings yet
- G K9FB6-40001 HoodDocument6 pagesG K9FB6-40001 HoodGustavo RodriguezNo ratings yet
- Interactive Var Dex Ros CA DoDocument412 pagesInteractive Var Dex Ros CA Dorafa1425No ratings yet
- Ghansali Pumping Water Supply SchemeDocument43 pagesGhansali Pumping Water Supply SchemeProject ManagerStructuresNo ratings yet
- Studies On Chemical Resistance of Low Water/cement Ratio ConcretesDocument10 pagesStudies On Chemical Resistance of Low Water/cement Ratio ConcretesMaziar MehravarNo ratings yet
- Feasibility Study of Application of Residential Rainwater Harvesting: A Water-Energy Nexus ApproachDocument5 pagesFeasibility Study of Application of Residential Rainwater Harvesting: A Water-Energy Nexus ApproachSujan MaharjanNo ratings yet
- Bryant Ba13na0600ng Article 1470385911092 en SsDocument18 pagesBryant Ba13na0600ng Article 1470385911092 en SsFany RsNo ratings yet
- VE5C VE Commodore Hard Lid ManualDocument13 pagesVE5C VE Commodore Hard Lid ManualmathewNo ratings yet
- Course DescriptionsDocument28 pagesCourse DescriptionsRoberto HoffmanNo ratings yet
- Calculating Design Loads For Residential Structures: Pdhonline Course S199 (4 PDH)Document34 pagesCalculating Design Loads For Residential Structures: Pdhonline Course S199 (4 PDH)Vincent De GuzmanNo ratings yet
- Toda Hut: Vernacular ArchitectureDocument9 pagesToda Hut: Vernacular ArchitectureKrittikaNo ratings yet
- Caterpillar Disassembly and Assembly Transmission 950g and 962g Wheel LoaderDocument20 pagesCaterpillar Disassembly and Assembly Transmission 950g and 962g Wheel Loaderpatrick100% (40)
- CGAT Catalog0303Document2 pagesCGAT Catalog0303Chinith HengNo ratings yet
- FDS Lab03Document7 pagesFDS Lab03Mack99tsNo ratings yet