You might also like
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Sliding Window Sum Algorithms For Deep Neural NetworksDocument8 pagesSliding Window Sum Algorithms For Deep Neural NetworksJames MorenoNo ratings yet
- A Review of Cybersecurity As An Effective Tool For Fighting Identity Theft Across The United StatesDocument12 pagesA Review of Cybersecurity As An Effective Tool For Fighting Identity Theft Across The United StatesJames MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- A New Method To Explore The Integer Partition ProblemDocument9 pagesA New Method To Explore The Integer Partition ProblemJames MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- Improving User Experience With Online Learning Using Analytical Comparasions Between Instructors & Students of Qatar UniversityDocument26 pagesImproving User Experience With Online Learning Using Analytical Comparasions Between Instructors & Students of Qatar UniversityJames MorenoNo ratings yet
- Investigating The Future of Engineer of 2020' Attributes: Moving From Access To Engagement & Sense of BelongingDocument11 pagesInvestigating The Future of Engineer of 2020' Attributes: Moving From Access To Engagement & Sense of BelongingJames MorenoNo ratings yet
- International Journal of Game Theory and Technology (IJGTT)Document2 pagesInternational Journal of Game Theory and Technology (IJGTT)CS & ITNo ratings yet
- Advancesin Vision Computing:An International Journal (AVC) : Call For PapersDocument2 pagesAdvancesin Vision Computing:An International Journal (AVC) : Call For PapersAnonymous zsOsFoNo ratings yet
- Advancesin Vision Computing:An International Journal (AVC) : Call For PapersDocument2 pagesAdvancesin Vision Computing:An International Journal (AVC) : Call For PapersAnonymous zsOsFoNo ratings yet
- Scope & Topics: ISSN: 0976-9404 (Online) 2229-3949 (Print)Document2 pagesScope & Topics: ISSN: 0976-9404 (Online) 2229-3949 (Print)ijgcaNo ratings yet
- International Journal On Cybernetics & Informatics (IJCI)Document2 pagesInternational Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Call For Papers-International Journal On Cybernetics & Informatics (IJCI)Document2 pagesCall For Papers-International Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- Call For Papers - InformaticsEngineering, anInternationalJournal (IEIJ)Document2 pagesCall For Papers - InformaticsEngineering, anInternationalJournal (IEIJ)Anonymous w6iqRPANo ratings yet
- International Journal On Cybernetics & Informatics (IJCI)Document2 pagesInternational Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- Teaching and Learning With Ict Tools: Issues and ChallengesDocument8 pagesTeaching and Learning With Ict Tools: Issues and ChallengesJames MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- International Journal On Cybernetics & Informatics (IJCI)Document2 pagesInternational Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cybernetics & Informatics (IJCI)Document2 pagesInternational Journal On Cybernetics & Informatics (IJCI)James MorenoNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- International Journal On Cloud Computing: Services and Architecture (IJCCSA)Document2 pagesInternational Journal On Cloud Computing: Services and Architecture (IJCCSA)Anonymous roqsSNZNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Expert Systems and Probabilistic Network Models PDFDocument2 pagesExpert Systems and Probabilistic Network Models PDFArthur0% (1)
- Interactive Rendering Using The Render Cache: AbstractDocument13 pagesInteractive Rendering Using The Render Cache: Abstractanjaiah_19945No ratings yet
- DEM & Terrain AnalysisDocument7 pagesDEM & Terrain AnalysisadhiefatmaragaNo ratings yet
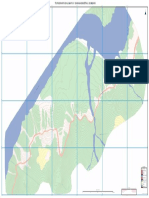
- Sunsari Landslide Topo Map PDFDocument1 pageSunsari Landslide Topo Map PDFTriChandra MaharjanNo ratings yet
- GDC09 Valient Rendering Technology of Killzone 2 Extended Presenter Notes PDFDocument8 pagesGDC09 Valient Rendering Technology of Killzone 2 Extended Presenter Notes PDFdagushNo ratings yet
- 50 Top Design Engineering Software Tools and Apps - PannamDocument43 pages50 Top Design Engineering Software Tools and Apps - PannamAgniva DuttaNo ratings yet
- Chapter 1 - Perspective DrawingDocument23 pagesChapter 1 - Perspective Drawingpriyanga_priya12100% (4)
- QUIZ 25047 ReynaldiDocument19 pagesQUIZ 25047 ReynaldiReynaldi Ferliez SullivanNo ratings yet
- PIX4D Simply PowerfulDocument43 pagesPIX4D Simply PowerfulJUAN BAQUERONo ratings yet
- Section 7Document19 pagesSection 7dogudoguNo ratings yet
- Sales Forecast (Monte Carlo Simulation)Document102 pagesSales Forecast (Monte Carlo Simulation)Sourav SharmaNo ratings yet
- DBMSDocument373 pagesDBMSTushar PatelNo ratings yet
- Introduction To GPSSDocument25 pagesIntroduction To GPSSTej ShahiNo ratings yet
- Chapter 3: Proposed Solution Modelling: Context DiagramDocument2 pagesChapter 3: Proposed Solution Modelling: Context DiagramDave Jimwel ManzanoNo ratings yet
- Discrete Event Simulation ModelingDocument116 pagesDiscrete Event Simulation ModelingSamrat MukhopadhyayNo ratings yet
- Data ValidationDocument32 pagesData ValidationManoj ChaudharyNo ratings yet
- BIM - 4th - Dimension PDFDocument49 pagesBIM - 4th - Dimension PDFrmnrajanNo ratings yet
- Mis Documentation FormatDocument2 pagesMis Documentation FormatScribdlerNo ratings yet
- Normalisation Seminar ReportDocument29 pagesNormalisation Seminar ReportMohit DasNo ratings yet
- OOAD-Ali BahramiDocument122 pagesOOAD-Ali BahramiAndrew Walls75% (8)
- Chapter 2 - Database Requirements and ER ModelingDocument74 pagesChapter 2 - Database Requirements and ER ModelingFadi AyoubNo ratings yet
- Create and Insert CommandsDocument20 pagesCreate and Insert Commandsapi-92498388No ratings yet
- AvdavDocument13 pagesAvdavTudor Adrian 『 』No ratings yet
- Revit Basic Structure ModelingDocument8 pagesRevit Basic Structure ModelingSony JsdNo ratings yet
- Introduction To Computer Graphics: Torsten Möller TASC 8021 778-782-2215 WWW - Cs.sfu - Ca/ TorstenDocument29 pagesIntroduction To Computer Graphics: Torsten Möller TASC 8021 778-782-2215 WWW - Cs.sfu - Ca/ TorstenDhrubajyoti SinghaNo ratings yet
- Lab Report: SimulinkDocument2 pagesLab Report: SimulinkM Luqman FarooquiNo ratings yet
- Sta116 Scheme of Work and Assessment For Online ClassDocument2 pagesSta116 Scheme of Work and Assessment For Online ClassRashidNo ratings yet
- S-Object Oriented Analysis and DesignDocument115 pagesS-Object Oriented Analysis and DesignstudentscornersNo ratings yet
- IGES N STEP PDFDocument5 pagesIGES N STEP PDFAthira Sobhana RamachandranNo ratings yet
- Week 6Document13 pagesWeek 6UniCornNo ratings yet