You might also like
- Diseño de Circuitos Combinatorios y Secuenciales HidráulicosDocument8 pagesDiseño de Circuitos Combinatorios y Secuenciales HidráulicosroomelNo ratings yet
- Circuitos Combinatorios y Secuenciales de NeumáticaDocument145 pagesCircuitos Combinatorios y Secuenciales de NeumáticaDarcooNo ratings yet
- Aplicaciones Basicas DSP320F2812 PDFDocument222 pagesAplicaciones Basicas DSP320F2812 PDFGiovanni José Huacasi SupoNo ratings yet
- Comandos PicDocument49 pagesComandos PicEmilio Salazar HernandezNo ratings yet
- Notas Del PIC16F84Document132 pagesNotas Del PIC16F84Thecar DarkNo ratings yet
- Puertos de I/O Pic16f877Document30 pagesPuertos de I/O Pic16f877anon_376202896No ratings yet
- Proyecto de Arquitectura de ComputadorasDocument9 pagesProyecto de Arquitectura de ComputadorasfabriickdNo ratings yet
- Regulacion de Intensidad de Brillo Con Led PicDocument7 pagesRegulacion de Intensidad de Brillo Con Led PicDavid Shure Xiv100% (1)
- Cuestionario Levas EngranesDocument3 pagesCuestionario Levas EngranesDamián González0% (1)
- El Lenguaje Ensamblador Del PIC16F84A PDFDocument20 pagesEl Lenguaje Ensamblador Del PIC16F84A PDFregistrogsNo ratings yet
- Clase07b-Espacio de EstadoDocument43 pagesClase07b-Espacio de Estadogiosue neNo ratings yet
- Practica de Laboratorio Nro 2 Sistemas Digitales IIDocument4 pagesPractica de Laboratorio Nro 2 Sistemas Digitales IIiriebinghimanNo ratings yet
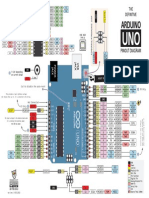
- Arduino Pinout y Conexiones BasicasDocument46 pagesArduino Pinout y Conexiones BasicasjeruvaNo ratings yet
- Curso de Programación Del DSP TMS320F2812 de La Pagina WebDocument40 pagesCurso de Programación Del DSP TMS320F2812 de La Pagina WebiriebinghimanNo ratings yet
- Examen Teórico Máquians y MecanismosDocument15 pagesExamen Teórico Máquians y MecanismosDani CRNo ratings yet
- Analisis de Velocidad, Mecanismo 4 BarrasDocument5 pagesAnalisis de Velocidad, Mecanismo 4 BarrasmcluissNo ratings yet
- Ejemplo Resuelto Comp Ens Adores LGRDocument3 pagesEjemplo Resuelto Comp Ens Adores LGRFreddy Israel Peñaloza Rangel0% (1)
- Practica Encender Led en EnsambladorDocument4 pagesPractica Encender Led en EnsambladorDavid Alejandro ReyesNo ratings yet
- Rubrica Foro N1Document1 pageRubrica Foro N1Gianni741852No ratings yet
- Servomotores LinealesDocument7 pagesServomotores LinealesAmanda HernandezNo ratings yet
- RectificadoresDocument3 pagesRectificadoresWilvertein C ChambiNo ratings yet
- Analisis Topologicos de MecanismosDocument38 pagesAnalisis Topologicos de MecanismosKarlin SmithNo ratings yet
- Series de FourierDocument20 pagesSeries de FourierDavid CristhianNo ratings yet
- Transmisión de PotenciaDocument3 pagesTransmisión de PotenciaLuis Omar Fajardo MelendezNo ratings yet
- Filtrado de Audio en MatlabDocument12 pagesFiltrado de Audio en MatlabEricsson ViaNo ratings yet
- AssemblerDocument4 pagesAssemblerArtur RoNo ratings yet
- Matlab Guia de Trabajos Practicos UNSEDocument40 pagesMatlab Guia de Trabajos Practicos UNSESebastian TrejoNo ratings yet
- SERVOSISTEMASDocument5 pagesSERVOSISTEMASCarlos VNo ratings yet
- Filtros Fir PDFDocument11 pagesFiltros Fir PDFCarlos NarváezNo ratings yet
- Mecánica y Teoría de Mecanismos, Práctica 1Document7 pagesMecánica y Teoría de Mecanismos, Práctica 1Josep BadiaNo ratings yet
- Pract 01Document9 pagesPract 01Rafael MarquezNo ratings yet
- Planificación de TrayectoriasDocument5 pagesPlanificación de TrayectoriasCristhian Flores0% (1)
- Transmisión de PotenciaDocument7 pagesTransmisión de PotenciaRmn JcboNo ratings yet
- Remachadora de 2 CilindrosDocument1 pageRemachadora de 2 CilindrosErnestoValdezNo ratings yet
- Historia Del Control de Clásico A Moderno, Concepto de Control y Diferencias Entre Control y Automatización.Document11 pagesHistoria Del Control de Clásico A Moderno, Concepto de Control y Diferencias Entre Control y Automatización.LogicTutosNo ratings yet
- Modeladoy SimulacionDocument36 pagesModeladoy Simulacionanblor71No ratings yet
- Practica 2 InformeDocument13 pagesPractica 2 InformeAbel CabaNo ratings yet
- Practica#7Document10 pagesPractica#7Alexiz CuNo ratings yet
- 01 - Repertorio de InstruccionesDocument11 pages01 - Repertorio de InstruccionesMack CartagenaNo ratings yet
- Diseño de Filtros Digitales Con FdatoolDocument9 pagesDiseño de Filtros Digitales Con FdatoolJose Vicente Avendaño AguileraNo ratings yet
- Explicación de Ejercicios Pág 163Document4 pagesExplicación de Ejercicios Pág 163georgey_jungleNo ratings yet
- Implementación de Filtros Digitales Por Medio de Fpga's para El Procesamiento de Señales Biomédicas PDFDocument94 pagesImplementación de Filtros Digitales Por Medio de Fpga's para El Procesamiento de Señales Biomédicas PDFING.R.HNo ratings yet
- Diseño de Elementos de Máquinas 4ta Edicion Robert L. Mott EspDocument475 pagesDiseño de Elementos de Máquinas 4ta Edicion Robert L. Mott EspBado MezaNo ratings yet
- Observador de Estados para Un Motor DCDocument9 pagesObservador de Estados para Un Motor DCJoseph Manuel Chamochumbi IndaraNo ratings yet
- Diagrama de Bloques de Una ComputadoraDocument21 pagesDiagrama de Bloques de Una Computadoramiguel angel choconta motavitaNo ratings yet
- Momento de InerciaDocument18 pagesMomento de InerciaEli HillNo ratings yet
- Programacion en LabviewDocument40 pagesProgramacion en Labviewrea_toby100% (1)
- Mecanismos de BarrasDocument18 pagesMecanismos de BarrasDaniel Camarillo100% (1)
- Divisor de FrecuenciaDocument7 pagesDivisor de FrecuenciaErnestoNo ratings yet
- Bloque 2. Ejercicios Metodos Numericos PDFDocument2 pagesBloque 2. Ejercicios Metodos Numericos PDFNiko MartinezNo ratings yet
- Diseño Logico Secuencial Con VHDLDocument43 pagesDiseño Logico Secuencial Con VHDLENIC-AITCG100% (1)
- Practica 8 ControlDocument11 pagesPractica 8 Controljorge hernandezNo ratings yet
- Practica 4Document9 pagesPractica 4Wendy LopezNo ratings yet
- Análisis y Síntesis de MecanismosDocument114 pagesAnálisis y Síntesis de MecanismosOstrogradski Sacks Alembert92% (12)
- Mecanismos IVDocument47 pagesMecanismos IVdanherzNo ratings yet
- Análisis y Síntesis de Mecanismos ResumenDocument17 pagesAnálisis y Síntesis de Mecanismos ResumenGAM TZ- Tutos y Covers100% (1)
- Mecanismos IVDocument48 pagesMecanismos IVMarthiitaa PerezNo ratings yet
- Mecanismo - Wikipedia, La Enciclopedia LibreDocument4 pagesMecanismo - Wikipedia, La Enciclopedia LibreJose ChambillaNo ratings yet
- Investigación Aceleración de MecanismosDocument18 pagesInvestigación Aceleración de MecanismosJav RivNo ratings yet
- Lenguaje ColoresDocument4 pagesLenguaje Coloresdavid_voca3No ratings yet
- Capitulo 17 de TurbocargadoresDocument25 pagesCapitulo 17 de Turbocargadoresdavid_voca3No ratings yet
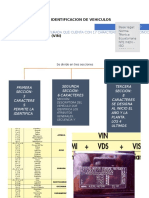
- El Numero de Identificacion de Vehiculos AutomotoresDocument3 pagesEl Numero de Identificacion de Vehiculos Automotoresdavid_voca3No ratings yet
- Motor de Combustion InternaDocument6 pagesMotor de Combustion Internadavid_voca3No ratings yet
- Ejemplos de Tipos de FabricaciónDocument5 pagesEjemplos de Tipos de Fabricacióndavid_voca3No ratings yet
- El Numero de Identificacion de Vehiculos AutomotoresDocument3 pagesEl Numero de Identificacion de Vehiculos Automotoresdavid_voca3No ratings yet
- Frenos de Disco (Enviar)Document6 pagesFrenos de Disco (Enviar)david_voca3No ratings yet
- La Formación Del AgrimensorDocument7 pagesLa Formación Del AgrimensorJosues BeatoNo ratings yet
- Practica Series de TiempoDocument4 pagesPractica Series de TiempoJose Franco SalazarNo ratings yet
- Especificacion FPS TahuapalcaDocument36 pagesEspecificacion FPS TahuapalcaZapata EmilianoNo ratings yet
- Práctica de Laboratorio # 5-Estudio de Instrumentos Ópticos-2012505Document4 pagesPráctica de Laboratorio # 5-Estudio de Instrumentos Ópticos-2012505RubenNo ratings yet
- Ficha TecnicaDocument5 pagesFicha TecnicaEduardo Chamo AtNo ratings yet
- El Taladro y Sus ComponentesDocument24 pagesEl Taladro y Sus Componentesluiscadulcey28No ratings yet
- Contaminacion Del AguaDocument65 pagesContaminacion Del AguayomiraNo ratings yet
- FedEx MD10 - Accidente Aéreo PDFDocument22 pagesFedEx MD10 - Accidente Aéreo PDFJOvaNo ratings yet
- Curso de C++ Con La ApiDocument90 pagesCurso de C++ Con La ApiCarlos VillamizarNo ratings yet
- 13 - Presentacion Resortes 2020 F PDFDocument38 pages13 - Presentacion Resortes 2020 F PDFCristian FWNo ratings yet
- Proyecto TesisDocument8 pagesProyecto TesisLulu LuluNo ratings yet
- 1906 01780Document7 pages1906 01780Fernando DíazNo ratings yet
- Rutina de Mantenimiento para DesfibriladorDocument2 pagesRutina de Mantenimiento para DesfibriladorGustavo Calle67% (3)
- Perforacion Diamantina PDFDocument57 pagesPerforacion Diamantina PDFBrndnNo ratings yet
- Calculo BOCATOMA - Diana Chevarria CarazasDocument96 pagesCalculo BOCATOMA - Diana Chevarria CarazasDiana ChevarriaNo ratings yet
- Plasmon de ResonanciaDocument12 pagesPlasmon de Resonanciajorge antonio palafoxNo ratings yet
- Ficha IsieDocument16 pagesFicha IsieLUIS ALBERTO COCA LAZONo ratings yet
- Práctica 8 - Motor Asincrónico Con CargaDocument8 pagesPráctica 8 - Motor Asincrónico Con CargaCamilo VelandiaNo ratings yet
- PTS-CT-34 - Operación Grúa RT PDFDocument20 pagesPTS-CT-34 - Operación Grúa RT PDFNazareth GodoyNo ratings yet
- 001 Informe de Adicional de Obra y Deductivo CuchosDocument5 pages001 Informe de Adicional de Obra y Deductivo CuchosLuis Angel Montes ChavezNo ratings yet
- Fabula El Perro y El ReflejoDocument5 pagesFabula El Perro y El ReflejoDavidNo ratings yet
- Od-410 25 60 0mi1554Document156 pagesOd-410 25 60 0mi1554alejandrogm_95278No ratings yet
- Analisis de Precios UnitariosDocument70 pagesAnalisis de Precios Unitariosjoaquin rodriguez oreNo ratings yet
- Procedimiento de Bloqueo y TarjeteoDocument19 pagesProcedimiento de Bloqueo y TarjeteotomassagredoNo ratings yet
- Nota Circuitos 2 Unidad 1 Analisis de Redes de CA en Estado Estacionario ElectricaDocument46 pagesNota Circuitos 2 Unidad 1 Analisis de Redes de CA en Estado Estacionario ElectricaRuben AguirreNo ratings yet
- Formato Ieee EcciDocument2 pagesFormato Ieee Ecciandres felipe martinezNo ratings yet
- Atego 1016Document36 pagesAtego 1016Edwin Yamith Ibarra Suárez100% (3)
- Reglamento ANDE (Texto)Document41 pagesReglamento ANDE (Texto)Luna PalaciosNo ratings yet
- Qué Es La RAMDocument2 pagesQué Es La RAMpacogo8338No ratings yet
- Ventilador Evita 4 DragerDocument204 pagesVentilador Evita 4 Dragersanti31221100% (1)