You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Voltage Regulation of alternator-EMF, MMF - ZPF-Expt-7Document7 pagesVoltage Regulation of alternator-EMF, MMF - ZPF-Expt-7Gingka HaganeNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- EECS Lab Manual For IV ECE R2013Document66 pagesEECS Lab Manual For IV ECE R2013keshav315No ratings yet
- Dcservo NewkitDocument11 pagesDcservo NewkitNikita MalikNo ratings yet
- Ac Servo MotorDocument14 pagesAc Servo MotorJeyanthNo ratings yet
- Lab Manual: Ee 2305 Electrical Machines Lab IiDocument38 pagesLab Manual: Ee 2305 Electrical Machines Lab IiskrtamilNo ratings yet
- Lab Manual PDFDocument82 pagesLab Manual PDFManasa Sathyanarayana SNo ratings yet
- Control System Lab ManualDocument52 pagesControl System Lab ManualMohammad Umar RehmanNo ratings yet
- Lab ManualDocument56 pagesLab ManualNishant AgrawalNo ratings yet
- Machine Manual PDFDocument35 pagesMachine Manual PDFh1169104No ratings yet
- Performance Evaluation of A Newly Constructed Three Phase Flexible Inverter For Speed Control of A Brushless DC MotorDocument11 pagesPerformance Evaluation of A Newly Constructed Three Phase Flexible Inverter For Speed Control of A Brushless DC MotorAJER JOURNALNo ratings yet
- MECHDocument36 pagesMECHPalak AriwalaNo ratings yet
- ED LAB ManualDocument31 pagesED LAB Manualmanoj kumar100% (1)
- Rotating Electrical Machine Lab: B.E. 5 SemesterDocument33 pagesRotating Electrical Machine Lab: B.E. 5 SemesterSuma Rani GNo ratings yet
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocument21 pagesElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNo ratings yet
- ElecDocument31 pagesElecdeepanshumehalawat07No ratings yet
- Short Shunt (2007)Document7 pagesShort Shunt (2007)Jeffrey NambatacNo ratings yet
- (EM 2) - Lab Manual 4th SemDocument43 pages(EM 2) - Lab Manual 4th SemTime LapserNo ratings yet
- EM Lab For ECEDocument24 pagesEM Lab For ECEAnbalagan GuruNo ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FBalraj SinghNo ratings yet
- ELP332 SecCyc 23-24 1Document15 pagesELP332 SecCyc 23-24 1satyamsinghgour2002No ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FDheeraj KumarNo ratings yet
- Electrical Drive - LAB-ManualDocument31 pagesElectrical Drive - LAB-Manualanil patelNo ratings yet
- (P1) Modul DC Motor Speed Control SystemDocument13 pages(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726No ratings yet
- V-I Characteristics of SCRDocument27 pagesV-I Characteristics of SCRPuneeth PuniNo ratings yet
- Benn Machine Lab ManualDocument14 pagesBenn Machine Lab ManualRahatullah Khan100% (1)
- Ps Lab ManualDocument132 pagesPs Lab ManualRamkrishnaNo ratings yet
- Variable Frequency Drive: Abstract-The DC To AC Converters Is Known AsDocument4 pagesVariable Frequency Drive: Abstract-The DC To AC Converters Is Known AsDiego AragónNo ratings yet
- Lab Info. - Synchronous Machine ExperimentsDocument3 pagesLab Info. - Synchronous Machine ExperimentsmikeNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Induction MatlabDocument12 pagesInduction Matlabgrido002No ratings yet
- DC Shunt Motor Speed ControlDocument7 pagesDC Shunt Motor Speed Controleric wahomeNo ratings yet
- DC Machines Lab ManualDocument153 pagesDC Machines Lab ManualdaluNo ratings yet
- DC Machines Lab ManualDocument72 pagesDC Machines Lab ManualPuneeth PuniNo ratings yet
- ECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationDocument6 pagesECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationAnimesh GhoshNo ratings yet
- PE304 - Buck ConverterDocument4 pagesPE304 - Buck ConverterBenjamin SebastianNo ratings yet
- Induction1 PDFDocument2 pagesInduction1 PDFAkhilrajscribdNo ratings yet
- Ee2257 LMDocument104 pagesEe2257 LMthamizmaniNo ratings yet
- Ed File SID 266Document31 pagesEd File SID 266Siddartha AggarwalNo ratings yet
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDocument63 pagesJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNo ratings yet
- Me 2209 Electrical Engineering Lab ManualDocument45 pagesMe 2209 Electrical Engineering Lab ManualSai Karthi100% (1)
- CTRL Sys Lab ManualDocument46 pagesCTRL Sys Lab Manualabixek100% (2)
- Welcome: Electrical Machines Testing DepartmentDocument58 pagesWelcome: Electrical Machines Testing DepartmentMani KandanNo ratings yet
- Experiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkDocument2 pagesExperiment No Object:-Requirement:-: S.N. Apparatus Type Range Qty. RemarkAkhilesh Kumar MishraNo ratings yet
- DC-DC Converters: Experiment 8Document11 pagesDC-DC Converters: Experiment 8Muhammad Sohaib ShahidNo ratings yet
- Electromechanical Energy Conversion Lab ManualDocument61 pagesElectromechanical Energy Conversion Lab Manualprathyush srinivasanNo ratings yet
- Manual EEE2003Document64 pagesManual EEE2003rishanNo ratings yet
- Lm555 555c TimerDocument12 pagesLm555 555c TimerAlexis Orellana VediaNo ratings yet
- Buck Boost Ec2404Document65 pagesBuck Boost Ec2404Sai ChandhraNo ratings yet
- Ed Lab ManualDocument27 pagesEd Lab ManualBonnieNo ratings yet
- 2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control MethodDocument4 pages2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control Methodbhavesh1863100% (1)
- Exp-7 3-Ph Vsi Fed PWM InvDocument5 pagesExp-7 3-Ph Vsi Fed PWM Invaman srivastavaNo ratings yet
- Control Systems Lab ManualDocument67 pagesControl Systems Lab ManualRockstar Rich100% (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Advanced Multilevel Converters and Applications in Grid IntegrationFrom EverandAdvanced Multilevel Converters and Applications in Grid IntegrationAli Iftekhar MaswoodNo ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- MP Electrical Drives Lab ManualDocument37 pagesMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- 23 Solar IntroDocument42 pages23 Solar IntroSoumiya SrinivasanNo ratings yet
- Transmission Line Simulator ExpDocument4 pagesTransmission Line Simulator ExpSoumiya SrinivasanNo ratings yet
- Exp No: 4 Application of Op-Amp As Comparator AimDocument3 pagesExp No: 4 Application of Op-Amp As Comparator AimSoumiya SrinivasanNo ratings yet
- Final Version - Impulse Testing and Insulation Deterioration in Electric MotorsDocument6 pagesFinal Version - Impulse Testing and Insulation Deterioration in Electric MotorsJoseph ChamiNo ratings yet
- Grade 7 LPDocument5 pagesGrade 7 LPMelfe John CerezoNo ratings yet
- Welding Tools and EquipmentsDocument9 pagesWelding Tools and EquipmentsMarko futeNo ratings yet
- Dual Axis Solar Tracker Final Project ReportDocument48 pagesDual Axis Solar Tracker Final Project ReportAsingwire Bonus80% (5)
- DTK-120HW, DTK-MRJ11, DTK-2LVLP: Surge ProtectorsDocument1 pageDTK-120HW, DTK-MRJ11, DTK-2LVLP: Surge Protectorsethan8888No ratings yet
- Edited Light - Particle or A Wave ArticleDocument5 pagesEdited Light - Particle or A Wave Articleapi-253993915No ratings yet
- A173 enDocument12 pagesA173 enRaj BrothersNo ratings yet
- Applications of 8086Document38 pagesApplications of 8086Ajay PeterNo ratings yet
- Max Allowable Pressure of Pipes and Pipellines CER 04022013 1 (V. S. Kumar Unprotected)Document106 pagesMax Allowable Pressure of Pipes and Pipellines CER 04022013 1 (V. S. Kumar Unprotected)Vashish Ramrecha100% (1)
- Internship Report WaterDocument54 pagesInternship Report WaterEphrem Gizachew100% (1)
- Detroit Diesel Firing OrdersDocument1 pageDetroit Diesel Firing OrdersRami Dal100% (1)
- Downhole Gas SeparatorDocument7 pagesDownhole Gas SeparatorleoarzuzaNo ratings yet
- Lesson 2 Commercial Refrigeration and Airconditioning TypesDocument41 pagesLesson 2 Commercial Refrigeration and Airconditioning TypesEddie AbugNo ratings yet
- CG Drive SGDocument1 pageCG Drive SGmanchem sreeram sanjay67% (3)
- 04 Mobilization PlanDocument9 pages04 Mobilization PlanMohd Khaidir100% (1)
- JFR Ratings Available PDFDocument1 pageJFR Ratings Available PDFMarcosNo ratings yet
- Commander GP: General Purpose AC Variable Speed Drive (0.75 To 110 KW)Document6 pagesCommander GP: General Purpose AC Variable Speed Drive (0.75 To 110 KW)carlosorizabaNo ratings yet
- 07 Pegasus Ibms v5.2Document4 pages07 Pegasus Ibms v5.2h2odavidNo ratings yet
- Minisplit Lennox r22 R410a 10seer PDFDocument4 pagesMinisplit Lennox r22 R410a 10seer PDFJulian Andres Moreno0% (1)
- JEE Main 2019 Detailed Analysis January Attempt Shift - 2 (09th January, 2019)Document8 pagesJEE Main 2019 Detailed Analysis January Attempt Shift - 2 (09th January, 2019)Resonance Eduventures100% (2)
- Laporan Praktik Mesin ListrikDocument4 pagesLaporan Praktik Mesin ListrikFatimah azzahraNo ratings yet
- ZF AVS Automatic Gearbox ManualDocument67 pagesZF AVS Automatic Gearbox Manualdaniel_ting_191% (22)
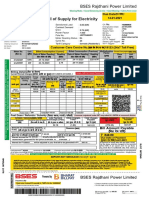
- Bill of Supply For Electricity: BSES Rajdhani Power LimitedDocument2 pagesBill of Supply For Electricity: BSES Rajdhani Power LimitedVikasNo ratings yet
- Manual Micromotor NSK EX-203 PDFDocument2 pagesManual Micromotor NSK EX-203 PDFangie50% (2)
- Bucyrus HD495Document8 pagesBucyrus HD495Ivan100% (1)
- c2Document145 pagesc2sathish kumarNo ratings yet
- Astm F714Document10 pagesAstm F714santiago barrionuevoNo ratings yet
- Troubleshooting and Service Manual 120V-240VDocument48 pagesTroubleshooting and Service Manual 120V-240Vkloberg123No ratings yet
- 1025936797Document184 pages1025936797Wilson AgudeloNo ratings yet
- Planetophysical Function of Vacuum Domains (Dmitriev, Dyatlov)Document15 pagesPlanetophysical Function of Vacuum Domains (Dmitriev, Dyatlov)THE NIKOLA TESLA INSTITUTE100% (1)