You might also like
- Discrete Cosine Transform PDFDocument4 pagesDiscrete Cosine Transform PDFMohammad RofiiNo ratings yet
- Adaptive Fuzzy Control of Direct-Current Motor Dead-Zone SystemsDocument9 pagesAdaptive Fuzzy Control of Direct-Current Motor Dead-Zone SystemsVictor PassosNo ratings yet
- Collocation Solutions of A Weakly Singular Volterra Integral EquationDocument10 pagesCollocation Solutions of A Weakly Singular Volterra Integral EquationGaurav LathwalNo ratings yet
- Image Characterization by Fast Calculation of Low-Order: Legendre MomentsDocument6 pagesImage Characterization by Fast Calculation of Low-Order: Legendre MomentsPinku MeenaNo ratings yet
- Discrete Fourier Transform: e C T F DT e T F T CDocument9 pagesDiscrete Fourier Transform: e C T F DT e T F T CJohn Bofarull GuixNo ratings yet
- Discrete Fourier Transform: e C T F DT e T F T C C CDocument9 pagesDiscrete Fourier Transform: e C T F DT e T F T C C CZuraidi EpendiNo ratings yet
- Spectrum AnalysisDocument35 pagesSpectrum AnalysisdogueylerNo ratings yet
- Paper Morales PublicadoDocument8 pagesPaper Morales PublicadoLuis Javier Morales-MendozaNo ratings yet
- Vimn : Iscas'88Document4 pagesVimn : Iscas'88Bhagya RajNo ratings yet
- A New Predictor-Corrector Method For Optimal Power FlowDocument5 pagesA New Predictor-Corrector Method For Optimal Power FlowfpttmmNo ratings yet
- תרגילים היילרןDocument83 pagesתרגילים היילרןMatanAbutbulNo ratings yet
- HD 7 Modal Analysis Undamped MDOFDocument45 pagesHD 7 Modal Analysis Undamped MDOFa_oucharNo ratings yet
- Discrete Fourier TransformDocument16 pagesDiscrete Fourier TransformGopinathan SudheerNo ratings yet
- Using Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchDocument14 pagesUsing Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchFransiscus DheniNo ratings yet
- Fast Fourier Transform and Option PricingDocument7 pagesFast Fourier Transform and Option PricingALNo ratings yet
- Icedyn2011 UdDocument6 pagesIcedyn2011 UdpaulojorgepiresmoitaNo ratings yet
- Pre PrintDocument30 pagesPre Printgorot1No ratings yet
- Convergent Inversion Approximations For Polynomials in Bernstein FormDocument18 pagesConvergent Inversion Approximations For Polynomials in Bernstein FormMaiah DinglasanNo ratings yet
- Discrete Fourier TransformDocument11 pagesDiscrete Fourier TransformWesley MutaiNo ratings yet
- Corrientes de EddyDocument5 pagesCorrientes de EddyHarley Alejo MNo ratings yet
- Section1.4 FFT AlgorithmDocument11 pagesSection1.4 FFT AlgorithmGovardhan Reddy.GNo ratings yet
- Computing The Permanental Polynomial of C in Parallel: MatchDocument10 pagesComputing The Permanental Polynomial of C in Parallel: Matchdragance106No ratings yet
- Ca Array 9 16Document8 pagesCa Array 9 16Manjunath RamachandraNo ratings yet
- Global Iterative Solution Dielectric Spectroscopv Equations: Sylvie Remi VaillancourtDocument6 pagesGlobal Iterative Solution Dielectric Spectroscopv Equations: Sylvie Remi VaillancourtVia GshNo ratings yet
- Poisson FormulaDocument15 pagesPoisson FormulaRiki NurzamanNo ratings yet
- Adaptive Lecture04 2005Document28 pagesAdaptive Lecture04 2005Cuter HsuNo ratings yet
- Sequential Monte Carlo MethodsDocument6 pagesSequential Monte Carlo Methodsmemex1No ratings yet
- Computation of The Discrete Fourier Transform: 49 MinutesDocument8 pagesComputation of The Discrete Fourier Transform: 49 Minutesapi-127299018No ratings yet
- Hy Using A New Statistically Optimal (N975) Patch Near-Field Acoustical Holograp MethodDocument8 pagesHy Using A New Statistically Optimal (N975) Patch Near-Field Acoustical Holograp MethodWon-young SeoNo ratings yet
- Monte Carlo Simulation in Thermal Radiative Transfer: Method Review, Validation and Parameter SensitivityDocument8 pagesMonte Carlo Simulation in Thermal Radiative Transfer: Method Review, Validation and Parameter SensitivityAsepta Surya WardhanaNo ratings yet
- Mathematical and Computer Modelling: K. Maleknejad, Z. JafaribehbahaniDocument12 pagesMathematical and Computer Modelling: K. Maleknejad, Z. JafaribehbahanihungkgNo ratings yet
- On some equations concerning the Casimir Effect Between World-Branes in Heterotic M-Theory and the Casimir effect in spaces with nontrivial topology. Mathematical connections with some sectors of Number Theory.Document59 pagesOn some equations concerning the Casimir Effect Between World-Branes in Heterotic M-Theory and the Casimir effect in spaces with nontrivial topology. Mathematical connections with some sectors of Number Theory.Michele NardelliNo ratings yet
- Molecular Dynamics Simulations: Che 520 Fall 2009Document8 pagesMolecular Dynamics Simulations: Che 520 Fall 2009Fabio OkamotoNo ratings yet
- Analysis of Electromagnetic Transmission Through Dielectric Filled Apertures of Arbitrary Shape in A Thick Conducting ScreenDocument8 pagesAnalysis of Electromagnetic Transmission Through Dielectric Filled Apertures of Arbitrary Shape in A Thick Conducting ScreenmatozdNo ratings yet
- A Fast Wavelet Transform-Domain LMS AlgorithmDocument4 pagesA Fast Wavelet Transform-Domain LMS AlgorithmAzka PamungkasNo ratings yet
- RepositoryDocument17 pagesRepositoryarefinhasib07No ratings yet
- clecocq,+JCAA Vol.11 No.3 1983 pp.047Document6 pagesclecocq,+JCAA Vol.11 No.3 1983 pp.047zerjuniorNo ratings yet
- Dorcak Petras 2007 PDFDocument7 pagesDorcak Petras 2007 PDFVignesh RamakrishnanNo ratings yet
- Davide Cescato, Moritz Borgmann, Helmut Bölcskei, Jan Hansen, and Andreas BurgDocument5 pagesDavide Cescato, Moritz Borgmann, Helmut Bölcskei, Jan Hansen, and Andreas BurgKhurram ShahzadNo ratings yet
- Successive Linearization Solution of ADocument9 pagesSuccessive Linearization Solution of AAnonymous lVQ83F8mCNo ratings yet
- 1d-Fdtd Using MatlabDocument13 pages1d-Fdtd Using MatlabKristo ChvNo ratings yet
- Fundamentals and Literature Review of Fourier Transform in Power Quality IssuesDocument14 pagesFundamentals and Literature Review of Fourier Transform in Power Quality IssuesFrew FrewNo ratings yet
- Intermodulation Product Computing Techniques For Broadband Active Transmit SystemsDocument10 pagesIntermodulation Product Computing Techniques For Broadband Active Transmit SystemsNarci EdsonNo ratings yet
- EE3tp4 Exam 2014Document6 pagesEE3tp4 Exam 2014Chris AielloNo ratings yet
- Analytical Solutions To Two-Dimensional D@usion Type Problems in H-Regular GeometriesDocument14 pagesAnalytical Solutions To Two-Dimensional D@usion Type Problems in H-Regular GeometriesflausenNo ratings yet
- R DataDocument5 pagesR DataMubangaNo ratings yet
- Bifurcation in The Dynamical System With ClearancesDocument6 pagesBifurcation in The Dynamical System With Clearancesklomps_jrNo ratings yet
- ECE 410 Digital Signal Processing D. Munson University of IllinoisDocument12 pagesECE 410 Digital Signal Processing D. Munson University of IllinoisFreddy PesantezNo ratings yet
- Circuits With Time-Varying Parameters: (Modulators, Frequency-Changers and Parametric Amplifiers)Document9 pagesCircuits With Time-Varying Parameters: (Modulators, Frequency-Changers and Parametric Amplifiers)shirtquittersNo ratings yet
- 1 s2.0 S0377042797000344 MainDocument10 pages1 s2.0 S0377042797000344 MainJESUS ELVIS CASTAÑEDA CASTILLONo ratings yet
- General Forced Response: P T N B P T N A A T FDocument11 pagesGeneral Forced Response: P T N B P T N A A T FSathish Kumar SNo ratings yet
- Inverse Kinematics Problem (Ikp) of 6-Dof Manipulator by Locally Recurrent Neural Networks (LRNNS)Document5 pagesInverse Kinematics Problem (Ikp) of 6-Dof Manipulator by Locally Recurrent Neural Networks (LRNNS)yousif al mashhadanyNo ratings yet
- Jackson 9.10, 9.16Document13 pagesJackson 9.10, 9.16razarizvi1No ratings yet
- HD 8 Prop Damped Modal AnalysisDocument22 pagesHD 8 Prop Damped Modal AnalysisAnonymous lEBdswQXmx100% (1)
- Partition Function of 1-, 2-, and 3-D Monatomic Ideal Gas: A Simple and Comprehensive ReviewDocument4 pagesPartition Function of 1-, 2-, and 3-D Monatomic Ideal Gas: A Simple and Comprehensive ReviewiremdemirkanNo ratings yet
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)From EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Implementation of E-Governance To Improve The Civil Administration Service Quality in Public SectorDocument11 pagesImplementation of E-Governance To Improve The Civil Administration Service Quality in Public SectorChristie YohanaNo ratings yet
- DeliciousDoughnuts Eguide PDFDocument35 pagesDeliciousDoughnuts Eguide PDFSofi Cherny83% (6)
- Micro EvolutionDocument9 pagesMicro EvolutionBryan TanNo ratings yet
- What's New in CAESAR II: Piping and Equipment CodesDocument1 pageWhat's New in CAESAR II: Piping and Equipment CodeslnacerNo ratings yet
- Canoe Matlab 001Document58 pagesCanoe Matlab 001Coolboy RoadsterNo ratings yet
- Book 1518450482Document14 pagesBook 1518450482rajer13No ratings yet
- WarringFleets Complete PDFDocument26 pagesWarringFleets Complete PDFlingshu8100% (1)
- TriPac EVOLUTION Operators Manual 55711 19 OP Rev. 0-06-13Document68 pagesTriPac EVOLUTION Operators Manual 55711 19 OP Rev. 0-06-13Ariel Noya100% (1)
- Progressive Muscle RelaxationDocument4 pagesProgressive Muscle RelaxationEstéphany Rodrigues ZanonatoNo ratings yet
- Comparison Between CompetitorsDocument2 pagesComparison Between Competitorsritesh singhNo ratings yet
- Pathology of LiverDocument15 pagesPathology of Liverערין גבאריןNo ratings yet
- PMP Assesment TestDocument17 pagesPMP Assesment Testwilliam collinsNo ratings yet
- Workbook Group TheoryDocument62 pagesWorkbook Group TheoryLi NguyenNo ratings yet
- Evs ProjectDocument19 pagesEvs ProjectSaloni KariyaNo ratings yet
- Journal of Biology EducationDocument13 pagesJournal of Biology EducationFarah ArrumyNo ratings yet
- Mosfet Irfz44Document8 pagesMosfet Irfz44huynhsang1979No ratings yet
- Test 51Document7 pagesTest 51Nguyễn Hiền Giang AnhNo ratings yet
- Disassembly Procedures: 1 DELL U2422HB - U2422HXBDocument6 pagesDisassembly Procedures: 1 DELL U2422HB - U2422HXBIonela CristinaNo ratings yet
- Listen and Arrange The Sentences Based On What You Have Heard!Document3 pagesListen and Arrange The Sentences Based On What You Have Heard!Dewi Hauri Naura HaufanhazzaNo ratings yet
- Canon Powershot S50 Repair Manual (CHAPTER 4. PARTS CATALOG) PDFDocument13 pagesCanon Powershot S50 Repair Manual (CHAPTER 4. PARTS CATALOG) PDFRita CaselliNo ratings yet
- Notes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0MDocument1 pageNotes:: Reinforcement in Manhole Chamber With Depth To Obvert Greater Than 3.5M and Less Than 6.0Mسجى وليدNo ratings yet
- Cyber Briefing Series - Paper 2 - FinalDocument24 pagesCyber Briefing Series - Paper 2 - FinalMapacheYorkNo ratings yet
- Man As God Created Him, ThemDocument3 pagesMan As God Created Him, ThemBOEN YATORNo ratings yet
- Sakui, K., & Cowie, N. (2012) - The Dark Side of Motivation - Teachers' Perspectives On 'Unmotivation'. ELTJ, 66 (2), 205-213.Document9 pagesSakui, K., & Cowie, N. (2012) - The Dark Side of Motivation - Teachers' Perspectives On 'Unmotivation'. ELTJ, 66 (2), 205-213.Robert HutchinsonNo ratings yet
- 01 托福基础课程Document57 pages01 托福基础课程ZhaoNo ratings yet
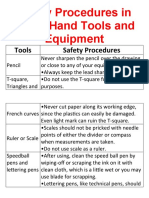
- Safety Procedures in Using Hand Tools and EquipmentDocument12 pagesSafety Procedures in Using Hand Tools and EquipmentJan IcejimenezNo ratings yet
- World Insurance Report 2017Document36 pagesWorld Insurance Report 2017deolah06No ratings yet
- ML Ass 2Document6 pagesML Ass 2Santhosh Kumar PNo ratings yet
- LM2576/LM2576HV Series Simple Switcher 3A Step-Down Voltage RegulatorDocument21 pagesLM2576/LM2576HV Series Simple Switcher 3A Step-Down Voltage RegulatorcgmannerheimNo ratings yet
- John L. Selzer - Merit and Degree in Webster's - The Duchess of MalfiDocument12 pagesJohn L. Selzer - Merit and Degree in Webster's - The Duchess of MalfiDivya AggarwalNo ratings yet