You might also like
- Grignard ReactionDocument1 pageGrignard ReactionSulaiman Al Shidhani100% (2)
- Applied Sciences: Elastoplastic Analysis of Frame Structures Using Radial Point Interpolation Meshless MethodsDocument27 pagesApplied Sciences: Elastoplastic Analysis of Frame Structures Using Radial Point Interpolation Meshless MethodsfelipaoNo ratings yet
- Smoothed Particle Hydrodynamics (SPH) : An Overview and Recent DevelopmentsDocument52 pagesSmoothed Particle Hydrodynamics (SPH) : An Overview and Recent DevelopmentsPac Agathe100% (1)
- Taylor-SPH: A Two-Steps Time Discretization Scheme Using The SPH Method For Shock Wave PropagationDocument13 pagesTaylor-SPH: A Two-Steps Time Discretization Scheme Using The SPH Method For Shock Wave PropagationIsabel H. CidNo ratings yet
- Computer Methods in Applied Mechanics - Applications of Point Interpolation Method For Spatial General Shells StructuresDocument15 pagesComputer Methods in Applied Mechanics - Applications of Point Interpolation Method For Spatial General Shells StructuresRichard LiuNo ratings yet
- ComputationalParticleMechanics AnisotropicMaterialPaper Watermarked PDFDocument22 pagesComputationalParticleMechanics AnisotropicMaterialPaper Watermarked PDFyagebu88No ratings yet
- Coupling of Mesh-Free Methods With Nite Elements: Basic Concepts and Test ResultsDocument35 pagesCoupling of Mesh-Free Methods With Nite Elements: Basic Concepts and Test ResultsRedouane RedaNo ratings yet
- Paper 1Document27 pagesPaper 1Disha GowdaNo ratings yet
- 2015 - Otero - Oller - Martinez - Salomon Numerical Homogenization For Composite MaterialsDocument12 pages2015 - Otero - Oller - Martinez - Salomon Numerical Homogenization For Composite MaterialsDiana Wagner WinterNo ratings yet
- SPH BasicsDocument27 pagesSPH BasicsSubash Gerrard DhakalNo ratings yet
- Material Nonlinear Analysis OnlyDocument34 pagesMaterial Nonlinear Analysis OnlynargissuhailNo ratings yet
- Meshless Methods: An Overview and Recent Developments: T. Belytschko Y. Krongauz D. Organ M. Fleming P. Krysl May 2, 1996Document79 pagesMeshless Methods: An Overview and Recent Developments: T. Belytschko Y. Krongauz D. Organ M. Fleming P. Krysl May 2, 1996Teodor PetrutNo ratings yet
- An Edge-Based Computationally-Efficient Formulation of Saint Venant-Kirchhoff Tetrahedral Finite ElementsDocument15 pagesAn Edge-Based Computationally-Efficient Formulation of Saint Venant-Kirchhoff Tetrahedral Finite ElementsChris LewinNo ratings yet
- Pena 2008-Application of The Natural Element Method To Finite Deformation Inelastic Problems in Isotropic and Fiber-Reinforced Biological Soft TissuesDocument14 pagesPena 2008-Application of The Natural Element Method To Finite Deformation Inelastic Problems in Isotropic and Fiber-Reinforced Biological Soft TissuesMinhao ZhouNo ratings yet
- The Reduced Model Multiscale Method (R3M) For The Non-Linear Homogenization of Hyperelastic Media at Finite StrainsDocument28 pagesThe Reduced Model Multiscale Method (R3M) For The Non-Linear Homogenization of Hyperelastic Media at Finite Strainssaded05No ratings yet
- A Three-Dimensional Computational Multiscale Micromorphic Analysis of Porous Materials in Linear ElasticityDocument22 pagesA Three-Dimensional Computational Multiscale Micromorphic Analysis of Porous Materials in Linear Elasticitysuman.cenithNo ratings yet
- Research Article: Peridynamic Model For The Numerical Simulation of Anchor Bolt Pullout in ConcreteDocument11 pagesResearch Article: Peridynamic Model For The Numerical Simulation of Anchor Bolt Pullout in ConcreteFernando QuezadaNo ratings yet
- Durham Research OnlineDocument23 pagesDurham Research Onlinerahim.sihadjmohandNo ratings yet
- Applsci 11 04637 v2Document27 pagesApplsci 11 04637 v2Gemechis KebedeNo ratings yet
- Meshfree Methods: Saeid ZahiriDocument21 pagesMeshfree Methods: Saeid ZahiriAnonymous vtNla0No ratings yet
- A Differential Approach To Microstructure-Dependent Bounds For Multiphase Heterogeneous MediaDocument25 pagesA Differential Approach To Microstructure-Dependent Bounds For Multiphase Heterogeneous MediaVioleta ManzurNo ratings yet
- Adaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDocument13 pagesAdaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDesmondd MondNo ratings yet
- Free Floating Space Robot ArticlesDocument2 pagesFree Floating Space Robot ArticlesHaile SimachewNo ratings yet
- 6441-Article Text-21271-2-10-20210520Document31 pages6441-Article Text-21271-2-10-20210520A HNo ratings yet
- Kahwash 2017Document9 pagesKahwash 2017Weight lossNo ratings yet
- Paper Published2Document8 pagesPaper Published2Giovani Jesus Berrospi AQuinoNo ratings yet
- Paper Namakian2014 EWFsDocument18 pagesPaper Namakian2014 EWFsJavier ZambranoNo ratings yet
- Conclusions and RecommendationsDocument2 pagesConclusions and RecommendationsLndIngenieriaNo ratings yet
- Computation of Three-Dimensional Linear Elasticity Problem Using Mesh and Mesh-Free Particle Modelling TechniquesDocument4 pagesComputation of Three-Dimensional Linear Elasticity Problem Using Mesh and Mesh-Free Particle Modelling TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- wscg09 FinaleDocument9 pageswscg09 FinaleAnderson MacielNo ratings yet
- Investigation of The Soil-Tool Interaction by SPH (Smooth Particle Hydrodynamics) Based SimulationDocument6 pagesInvestigation of The Soil-Tool Interaction by SPH (Smooth Particle Hydrodynamics) Based Simulationdarklord338No ratings yet
- International Journal of Solids and Structures: L. Wu, L. Noels, L. Adam, I. DoghriDocument18 pagesInternational Journal of Solids and Structures: L. Wu, L. Noels, L. Adam, I. DoghriRasagya MishraNo ratings yet
- The Generalized Interpolation Material Point MethoDocument21 pagesThe Generalized Interpolation Material Point MethoJeyson MolinaNo ratings yet
- Brief Study of XFEMDocument28 pagesBrief Study of XFEMVishal HotwaniNo ratings yet
- Finite Elements in Analysis and Design: Manuel Garcia, Jorge Gutierrez, Nestor RuedaDocument7 pagesFinite Elements in Analysis and Design: Manuel Garcia, Jorge Gutierrez, Nestor RuedachrissbansNo ratings yet
- Extended Multiscale Finite Element Method: Its Basis and Applications For Mechanical Analysis of Heterogeneous MaterialsDocument27 pagesExtended Multiscale Finite Element Method: Its Basis and Applications For Mechanical Analysis of Heterogeneous MaterialsTAWHIDNo ratings yet
- Examination and Analysis of Implementation Choices Within The Material Point Method (MPM)Document22 pagesExamination and Analysis of Implementation Choices Within The Material Point Method (MPM)irene321No ratings yet
- Simultaneous Topology and Stiffness Identification For Mass-Spring Models Based On FEM Reference DeformationsDocument9 pagesSimultaneous Topology and Stiffness Identification For Mass-Spring Models Based On FEM Reference Deformationsshahuo888No ratings yet
- Integrated Finite Element Neural Network I FENN For Non Local Continuum Damage Mechanics Response To PublisherDocument57 pagesIntegrated Finite Element Neural Network I FENN For Non Local Continuum Damage Mechanics Response To PublisherNealNo ratings yet
- Positesa.2016.12.026 Numerical Simulation of Progressive Damage and Failure in Composite Laminates Using XFEM CZM Coupled ApproachDocument11 pagesPositesa.2016.12.026 Numerical Simulation of Progressive Damage and Failure in Composite Laminates Using XFEM CZM Coupled Approachhamid rezaNo ratings yet
- DEM - DEM Simulation of Polyhedral Particle Cracking Using A Combined Mohr-Coulomb-Weibull Failure CriterionDocument11 pagesDEM - DEM Simulation of Polyhedral Particle Cracking Using A Combined Mohr-Coulomb-Weibull Failure CriterionTrung Trị LêNo ratings yet
- Finite Element Simulation of The Viscoelastic Behavior of Elastomers Under Finite Deformation With Consideration of Nonlinear Material ViscosityDocument22 pagesFinite Element Simulation of The Viscoelastic Behavior of Elastomers Under Finite Deformation With Consideration of Nonlinear Material ViscosityNam Huu TranNo ratings yet
- FEA Questions & AnswersDocument22 pagesFEA Questions & Answerspurojeetpttnk100% (1)
- Mirzajani Et AlDocument30 pagesMirzajani Et AlkhodakaramiNo ratings yet
- Performance Analysis of Flexible Pavement Using Finite Element MethodDocument7 pagesPerformance Analysis of Flexible Pavement Using Finite Element MethodBijay banNo ratings yet
- On The Formulation of Closest-Point Projection Algorithms in Elastoplasticity - Part IDocument38 pagesOn The Formulation of Closest-Point Projection Algorithms in Elastoplasticity - Part IMilanNo ratings yet
- Variational Crimes PDFDocument39 pagesVariational Crimes PDFBensingh DhasNo ratings yet
- Materials: Stiffness Estimates For Composites With Elliptic Cylindrical VoidsDocument23 pagesMaterials: Stiffness Estimates For Composites With Elliptic Cylindrical Voidsimharoon1No ratings yet
- Efg 1Document41 pagesEfg 1malenenivamsiNo ratings yet
- Feyel 2003Document12 pagesFeyel 2003trung hiếu hoàngNo ratings yet
- An Eulerian Lagrangian Scheme For Solving Large Deformation Fluid Structure Interaction ProblemsDocument31 pagesAn Eulerian Lagrangian Scheme For Solving Large Deformation Fluid Structure Interaction ProblemsUmair QaziNo ratings yet
- Polymer PaperDocument34 pagesPolymer PapermehtabpathanNo ratings yet
- Terri Ault 2006Document14 pagesTerri Ault 2006ChristopherElPadrinoCardenasNo ratings yet
- Mesh Density On ModalDocument11 pagesMesh Density On ModalabbaszkNo ratings yet
- Investigation of The Nonlinear Hyper-Viscoelastic Behavior of Elastomers at Finite Strain Implementation and Numerical ValidationDocument18 pagesInvestigation of The Nonlinear Hyper-Viscoelastic Behavior of Elastomers at Finite Strain Implementation and Numerical ValidationNam Huu TranNo ratings yet
- Search Algorithm, and Simulation of Elastodynamic Crack Propagation by Modified Smoothed Particle Hydrodynamics (MSPH) MethodDocument16 pagesSearch Algorithm, and Simulation of Elastodynamic Crack Propagation by Modified Smoothed Particle Hydrodynamics (MSPH) MethodXiaoming WangNo ratings yet
- Incompressible Flow Simulations of Composite Objects Using Meshfree and FPM ApproachesDocument4 pagesIncompressible Flow Simulations of Composite Objects Using Meshfree and FPM ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Discrete Element Modelling of Large Scale Particle Systems-I: Exact Scaling LawsDocument11 pagesDiscrete Element Modelling of Large Scale Particle Systems-I: Exact Scaling LawsMuhammad Adnan LaghariNo ratings yet
- High Performance Computing and the Discrete Element Model: Opportunity and ChallengeFrom EverandHigh Performance Computing and the Discrete Element Model: Opportunity and ChallengeNo ratings yet
- The Mimetic Finite Difference Method for Elliptic ProblemsFrom EverandThe Mimetic Finite Difference Method for Elliptic ProblemsNo ratings yet
- Mechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsFrom EverandMechanical Properties of Nanostructured Materials: Quantum Mechanics and Molecular Dynamics InsightsNo ratings yet
- Exploring Programming Language Architecture in Perl: Bill HailsDocument368 pagesExploring Programming Language Architecture in Perl: Bill HailslahsivlahsivNo ratings yet
- Non-Recursive Predictive ParsingDocument14 pagesNon-Recursive Predictive ParsinglahsivlahsivNo ratings yet
- Perl Cheat SheetDocument2 pagesPerl Cheat Sheetdinokid08100% (1)
- Tutorial: Intro To React - ReactDocument2 pagesTutorial: Intro To React - ReactlahsivlahsivNo ratings yet
- Nice Recursive ParsingDocument8 pagesNice Recursive ParsinglahsivlahsivNo ratings yet
- Automata PythonDocument31 pagesAutomata PythonlahsivlahsivNo ratings yet
- Top Down TranslationDocument96 pagesTop Down TranslationlahsivlahsivNo ratings yet
- Monkey Story PDFDocument16 pagesMonkey Story PDFlahsivlahsivNo ratings yet
- Goat ManagementDocument16 pagesGoat ManagementlahsivlahsivNo ratings yet
- Lions and JackalsDocument3 pagesLions and JackalslahsivlahsivNo ratings yet
- Tiger in TreeDocument8 pagesTiger in TreelahsivlahsivNo ratings yet
- Table-10 Districtwise Number of Donkeys, Rabbits by Breed, Dogs and Elephants - 2007Document3 pagesTable-10 Districtwise Number of Donkeys, Rabbits by Breed, Dogs and Elephants - 2007lahsivlahsivNo ratings yet
- Basic of StatisticsDocument83 pagesBasic of StatisticsMuhammad SyiardyNo ratings yet
- Basic of StatisticsDocument83 pagesBasic of StatisticsMuhammad SyiardyNo ratings yet
- Coal IDocument2 pagesCoal IKhamvanh PhengnaoneNo ratings yet
- Cat BatDocument12 pagesCat BatlahsivlahsivNo ratings yet
- Mechanics of BodyDocument22 pagesMechanics of BodylahsivlahsivNo ratings yet
- Goat of The MountainDocument2 pagesGoat of The MountainlahsivlahsivNo ratings yet
- Goats and CowsDocument54 pagesGoats and CowslahsivlahsivNo ratings yet
- Monkey GrassDocument4 pagesMonkey GrasslahsivlahsivNo ratings yet
- Lion ControlDocument4 pagesLion ControllahsivlahsivNo ratings yet
- Elephant and CatDocument4 pagesElephant and CatlahsivlahsivNo ratings yet
- Example Pages GYM InstructionsDocument7 pagesExample Pages GYM InstructionslahsivlahsivNo ratings yet
- Star Chart PosterDocument2 pagesStar Chart PosterHasrizam86No ratings yet
- GATE-2016 Brochure PDFDocument36 pagesGATE-2016 Brochure PDFPinaki MukherjeeNo ratings yet
- Cen DanceDocument5 pagesCen DancelahsivlahsivNo ratings yet
- Shoelaces: Shoelace KnotsDocument2 pagesShoelaces: Shoelace KnotslahsivlahsivNo ratings yet
- What FamilyDocument26 pagesWhat FamilylahsivlahsivNo ratings yet
- Clay-Based Technologies Manual - Building The Zeer Pot RefrigeratorDocument5 pagesClay-Based Technologies Manual - Building The Zeer Pot RefrigeratorThomas "Hirudinea" Leech100% (1)
- Properties of Ideal GasesDocument32 pagesProperties of Ideal GasesdvanupkleNo ratings yet
- Approximate Calculation of "Ground Reaction" When A Ship Is Aground Over Quite A Distance of Its Flat-Bottom and Is Not Heavily TrimmedDocument2 pagesApproximate Calculation of "Ground Reaction" When A Ship Is Aground Over Quite A Distance of Its Flat-Bottom and Is Not Heavily Trimmedmyusuf_engineerNo ratings yet
- KOM Expt. No. 2Document5 pagesKOM Expt. No. 2Vatsal PatelNo ratings yet
- Bond of Steel-Concrete InterfaceDocument112 pagesBond of Steel-Concrete InterfaceMacNo ratings yet
- DiffractionDocument45 pagesDiffractionDEVYANI AGGARWALNo ratings yet
- AIChE - Integrate Compressor Performance Maps Into Process SimulationDocument6 pagesAIChE - Integrate Compressor Performance Maps Into Process SimulationMuhammad ImranNo ratings yet
- Matter Part 1 - Scavenger HuntDocument14 pagesMatter Part 1 - Scavenger Huntapi-235382852No ratings yet
- Producer TheoryDocument8 pagesProducer TheoryOmer KhayyamNo ratings yet
- DXX-790-960/1710-2180-65/65-15i/17.5i i-M/M: Electrical Electrical Properties PropertiesDocument2 pagesDXX-790-960/1710-2180-65/65-15i/17.5i i-M/M: Electrical Electrical Properties Propertiespuljke100% (1)
- 350502main Optics Building A MicroscopeDocument4 pages350502main Optics Building A MicroscopeAzraeliusNo ratings yet
- Asme II Part A (A 36) - 2010Document6 pagesAsme II Part A (A 36) - 2010Nila GamaNo ratings yet
- Laws of Motion MCQs Sheet 1Document6 pagesLaws of Motion MCQs Sheet 1eka123100% (1)
- Class IX: Science Chapter 11: Work and Energy Chapter Notes Key LearningDocument2 pagesClass IX: Science Chapter 11: Work and Energy Chapter Notes Key LearningMohanNayakNo ratings yet
- Experiment 5Document6 pagesExperiment 5Vinicius GuimarãesNo ratings yet
- Quantitative Application of UV-Visible SpectrosDocument7 pagesQuantitative Application of UV-Visible SpectrosRoshan Mohammad100% (1)
- Che323 Lecture 2 Humidification Wet BulbDocument19 pagesChe323 Lecture 2 Humidification Wet Bulbifiok100% (1)
- SXXa XSDocument5 pagesSXXa XSraviteja tankalaNo ratings yet
- Megger OTS100 AFDocument5 pagesMegger OTS100 AFneerajaNo ratings yet
- Store CardDocument4 pagesStore CardAinurrofikBinSuja'iNo ratings yet
- 15 04 0662-02-004a Channel Model Final Report r1Document40 pages15 04 0662-02-004a Channel Model Final Report r1Alex Samuel Ludeña HuamaniNo ratings yet
- CFD Flow Analysis and Optimization of Exhaust MufflerDocument6 pagesCFD Flow Analysis and Optimization of Exhaust MufflerIJRASETPublicationsNo ratings yet
- Resistance of Concrete To Rapid Freezing and Thawing: Standard Test Method ForDocument6 pagesResistance of Concrete To Rapid Freezing and Thawing: Standard Test Method FormaribelNo ratings yet
- Origin of Modern AstronomyDocument41 pagesOrigin of Modern AstronomyNordianaNo ratings yet
- Home Assignment DC Motor Control1Document7 pagesHome Assignment DC Motor Control1jegjegtNo ratings yet
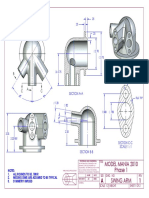
- TEM 02 Swivel JointsDocument102 pagesTEM 02 Swivel JointsOctavian Sarbu100% (2)
- Phase 1Document1 pagePhase 1Gilberto Perez HernandezNo ratings yet
- Physics 300 PS1Document4 pagesPhysics 300 PS1Justin ThomasNo ratings yet
- Night Vision GogglesDocument33 pagesNight Vision GogglesVijay Singh100% (2)
- 10th CBSE Science-Compressed PDFDocument337 pages10th CBSE Science-Compressed PDFAbhishekNo ratings yet