You might also like
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Direct Displacement-Based DesignDocument21 pagesDirect Displacement-Based DesignAmal OmarNo ratings yet
- Comparative Study On Concentric Steel Braced Frame Structure Due To Effect of Aspect Ratio Using Pushover AnalysisDocument6 pagesComparative Study On Concentric Steel Braced Frame Structure Due To Effect of Aspect Ratio Using Pushover AnalysisijsretNo ratings yet
- Lecture 6 Composite ColumnsDocument66 pagesLecture 6 Composite Columnsabdelrahman emad100% (1)
- Chapter 3 Direct Displacement Based DesignDocument68 pagesChapter 3 Direct Displacement Based DesignMuhammadNomanKNo ratings yet
- Seismic Performance of Shear Wall Buildings With Gravity-Induced Lateral DemandsDocument19 pagesSeismic Performance of Shear Wall Buildings With Gravity-Induced Lateral DemandsMREFAATNo ratings yet
- (EXTRACT) Ch. VIII Frame Hinge Properties - From CSI (2002) CSI Analysis Reference Manual For SAP2000, Etabs and SafeDocument12 pages(EXTRACT) Ch. VIII Frame Hinge Properties - From CSI (2002) CSI Analysis Reference Manual For SAP2000, Etabs and SafeO SNo ratings yet
- Benchmark Cases For Advanced Design of Structural Steel ConnectionsDocument26 pagesBenchmark Cases For Advanced Design of Structural Steel Connectionswendydy6No ratings yet
- Lec1 Steel Design 2nd Sem 2011-12Document6 pagesLec1 Steel Design 2nd Sem 2011-12Jesus Ray M. MansayonNo ratings yet
- Accelerated Brideg Construction in Washington StateDocument16 pagesAccelerated Brideg Construction in Washington StatesyedabdulhannanNo ratings yet
- AISC Design Guide 1 - Errata-Column Base Plates - 2nd Edition PDFDocument6 pagesAISC Design Guide 1 - Errata-Column Base Plates - 2nd Edition PDFसौरव डेNo ratings yet
- ACI 224R-01 Errata '08 OnlyDocument1 pageACI 224R-01 Errata '08 OnlyPSPNo ratings yet
- El Centro Earthquake Data AnalysisDocument4 pagesEl Centro Earthquake Data AnalysisQueren SurianoNo ratings yet
- Simplified Procedures For Calculation of Instantaneous and Long-Term Deflections of Reinforced Concrete BeamsDocument12 pagesSimplified Procedures For Calculation of Instantaneous and Long-Term Deflections of Reinforced Concrete BeamssukolikNo ratings yet
- Computers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliDocument17 pagesComputers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliSayna KellenyNo ratings yet
- Fema 355 CDocument51 pagesFema 355 CWei ZhangNo ratings yet
- C StrucAnalysis Wong Jan17 1Document4 pagesC StrucAnalysis Wong Jan17 1Hattori HanzoNo ratings yet
- Mahbuba Mam All Slides PDFDocument189 pagesMahbuba Mam All Slides PDFRubayet AlamNo ratings yet
- Two-Way Flat Slabs: Direct Design MethodDocument26 pagesTwo-Way Flat Slabs: Direct Design Methodshara000No ratings yet
- Chapter 1Document33 pagesChapter 1Divya V SNo ratings yet
- Elastic Link BehaviourDocument8 pagesElastic Link BehaviourBodhi RudraNo ratings yet
- Etabs Column DesignDocument15 pagesEtabs Column Designmagdyamdb100% (1)
- DatabankofConcentricPunchingOspinaetal PDFDocument19 pagesDatabankofConcentricPunchingOspinaetal PDFАлександр БударинNo ratings yet
- Influence Lines For Beams and FramesDocument7 pagesInfluence Lines For Beams and FramesAfia S HameedNo ratings yet
- Asian Journal of Civil Engineering-Pushover Analysis of Reinforced Concrete FrameDocument9 pagesAsian Journal of Civil Engineering-Pushover Analysis of Reinforced Concrete FrameFady W. IskanderNo ratings yet
- Displacement Based Seismic Design Chapter 01 (Points)Document14 pagesDisplacement Based Seismic Design Chapter 01 (Points)MuhammadNomanKNo ratings yet
- Nonlinear Analysis of Concrete StructuresDocument28 pagesNonlinear Analysis of Concrete StructuresMarko ŠimićNo ratings yet
- CE220 Reader For 2009Document677 pagesCE220 Reader For 2009gabrielfc19100% (1)
- Principal Axis of Irregular BuildingDocument14 pagesPrincipal Axis of Irregular BuildingNityananda Permadi Tjokrodimurti100% (2)
- Material Time-Dependent Properties at Sap 2000Document43 pagesMaterial Time-Dependent Properties at Sap 2000Nyein ZawNo ratings yet
- Handout ASCE 7-05Document59 pagesHandout ASCE 7-05Aqua MarineNo ratings yet
- CIE 525 HW 3 - Mkumar2Document13 pagesCIE 525 HW 3 - Mkumar2xxazninvasionxx2697No ratings yet
- CCL PT Slabs Brochure Eng PDFDocument15 pagesCCL PT Slabs Brochure Eng PDFSharad BornarkarNo ratings yet
- Sap ConcDocument192 pagesSap ConcJose SanchezNo ratings yet
- AISC Design Guide 10 Revisions-And-Errata-List PDFDocument2 pagesAISC Design Guide 10 Revisions-And-Errata-List PDFCarlo DizonNo ratings yet
- Moment Curvature Relation (6-10)Document26 pagesMoment Curvature Relation (6-10)Nicholas ThompsonNo ratings yet
- C 6 - One Way SlabsDocument25 pagesC 6 - One Way SlabsRekanNo ratings yet
- Shear in One-Way Slabs Under Concentrate PDFDocument10 pagesShear in One-Way Slabs Under Concentrate PDFHesham MohamedNo ratings yet
- 4.3 Moment Magnification PDFDocument13 pages4.3 Moment Magnification PDFChetan ChaudhariNo ratings yet
- A New Approach For Design of Steel Beam-Columns Our A.Document32 pagesA New Approach For Design of Steel Beam-Columns Our A.mbrown4382No ratings yet
- EnercalcDocument11 pagesEnercalcALEJANDRO PEREZ LUQUENo ratings yet
- To Study Analysis and Design of Multi-Storey Building Using STAAD-pro. and Comparing With Manual CalculationsDocument10 pagesTo Study Analysis and Design of Multi-Storey Building Using STAAD-pro. and Comparing With Manual Calculationssarfraj ansariNo ratings yet
- Alberta Infrastructure Bridge AestheticsDocument70 pagesAlberta Infrastructure Bridge AestheticsShikhar SinghNo ratings yet
- Moment-Curvature Relationship of Flexure-Dominated Walls With PartiallyDocument13 pagesMoment-Curvature Relationship of Flexure-Dominated Walls With Partiallyabraham_cea9076No ratings yet
- ACI 318-14: Reorganized For Design: Ch. 23 Strut-and-Tie ModelsDocument11 pagesACI 318-14: Reorganized For Design: Ch. 23 Strut-and-Tie ModelsUALU333No ratings yet
- Cie 525 - Reinforced Concrete Structures: Thursday SEPTEMBER 22, 2016Document10 pagesCie 525 - Reinforced Concrete Structures: Thursday SEPTEMBER 22, 2016Bodhi RudraNo ratings yet
- PLATE Vs SurfaceDocument2 pagesPLATE Vs SurfaceShantiswarup MahapatraNo ratings yet
- Mander - Priestley - Park (1988) - Observed Stress-Strain Behavior of Confined ConcreteDocument23 pagesMander - Priestley - Park (1988) - Observed Stress-Strain Behavior of Confined ConcreteSalvatore MirandaNo ratings yet
- Chapter 8 - Nonlinear Structural AnalysisDocument57 pagesChapter 8 - Nonlinear Structural AnalysisDeepak KumarNo ratings yet
- Dokumen - Tips Effective Length Factor For The Design of X Bracing SystemspdfDocument5 pagesDokumen - Tips Effective Length Factor For The Design of X Bracing Systemspdfkokab22No ratings yet
- CompositeMegaColumns Full ReportDocument275 pagesCompositeMegaColumns Full ReportRonakShah100% (1)
- STRUCTURAL ANALYSIS ACE MCQssDocument70 pagesSTRUCTURAL ANALYSIS ACE MCQssAndresDelaVegaNo ratings yet
- CalTrans 2010Document60 pagesCalTrans 2010Kamal Gm100% (1)
- Theory Manual Volume 1Document474 pagesTheory Manual Volume 1danielalevisNo ratings yet
- A New Codified Design Theory of Second-Order Direct Analysis For Steel A...Document7 pagesA New Codified Design Theory of Second-Order Direct Analysis For Steel A...Luis MartinsNo ratings yet
- On The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsDocument8 pagesOn The Evaluation of Critical Lateral Torsional Buckling Loads of Monosymmetric Beam ColumnsPauloAndresSepulvedaNo ratings yet
- Beams With Variable DepthDocument22 pagesBeams With Variable DepthNima Soufiani100% (1)
- Friction Pendulum System - A Parametric Study of Friction CoefficientDocument3 pagesFriction Pendulum System - A Parametric Study of Friction CoefficientIJSTENo ratings yet
- Datasheet (API 610 - 1 Page)Document8 pagesDatasheet (API 610 - 1 Page)Rudin Fahrudin RahmanNo ratings yet
- Function: Torque-Induced Gyroscopic Precession Heading Indicators or Directional GyrosDocument2 pagesFunction: Torque-Induced Gyroscopic Precession Heading Indicators or Directional GyrosViceNo ratings yet
- Circular MotionDocument45 pagesCircular MotionJames Young100% (1)
- PRASHANTDocument2 pagesPRASHANTdevan gandhiNo ratings yet
- Constitutive Equation and Normalized Carpet Plots of Symmetrical Fiber Reinforced LaminatesDocument90 pagesConstitutive Equation and Normalized Carpet Plots of Symmetrical Fiber Reinforced LaminatesjoereisNo ratings yet
- Training ReportDocument60 pagesTraining Reportarjun100% (1)
- Revised Cleaning and Painting Piece Rate Data 02-07-2021Document5 pagesRevised Cleaning and Painting Piece Rate Data 02-07-2021Corrosion FactoryNo ratings yet
- Project Report On SS Tube MillDocument8 pagesProject Report On SS Tube MillEIRI Board of Consultants and Publishers0% (1)
- Module 2 - ABE Common Materials - No PretestDocument13 pagesModule 2 - ABE Common Materials - No PretestSofiah Leahneil BergundoNo ratings yet
- 2 Trident Dryer Package (0421)Document29 pages2 Trident Dryer Package (0421)Jorge RicaurteNo ratings yet
- 4011b PDFDocument46 pages4011b PDFlungu mihaiNo ratings yet
- Riwayat Pemeliharaan Alat Wirtgen 2Document2 pagesRiwayat Pemeliharaan Alat Wirtgen 2Aulia Rizeky JanuaryNo ratings yet
- Chambal Cable Stayed Bridge Connecting ShoresDocument6 pagesChambal Cable Stayed Bridge Connecting Shoresafzal taiNo ratings yet
- Chapter 5 - Exhaust SystemsDocument26 pagesChapter 5 - Exhaust SystemsVin KenNo ratings yet
- Is.7396.1.1985 Surge Shaft DesignDocument26 pagesIs.7396.1.1985 Surge Shaft DesignVanu Vamalai100% (1)
- CE142P 2 Lab Report 1 Soberano PDFDocument14 pagesCE142P 2 Lab Report 1 Soberano PDFqwert qwertyNo ratings yet
- R1 PDFDocument15 pagesR1 PDFaliNo ratings yet
- Experiment No.1 ObjectiveDocument4 pagesExperiment No.1 ObjectivealiNo ratings yet
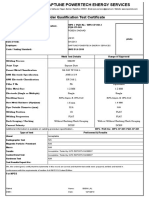
- Welder Qualification Test Certificate: Weld Test Details Range of ApprovalDocument1 pageWelder Qualification Test Certificate: Weld Test Details Range of ApprovalRamkunwar YadavNo ratings yet
- MG UniversityDocument2 pagesMG UniversityVaisakVenugopalNo ratings yet
- Valves. Valves and Fittings Pressure Drop CoefficientsDocument270 pagesValves. Valves and Fittings Pressure Drop CoefficientsJMV100% (1)
- Electric Feed Systems For Liquid Propellant Rocket Engines PDFDocument178 pagesElectric Feed Systems For Liquid Propellant Rocket Engines PDFandradesosNo ratings yet
- Kyle Hilliard - Thin Films and The Magnetocaloric EffectDocument9 pagesKyle Hilliard - Thin Films and The Magnetocaloric Effectapi-607974046No ratings yet
- Multi ElementDocument1 pageMulti Elementapi-3703371No ratings yet
- Strengthening of Reinforced Concrete Beams Using FRP Technique: A ReviewDocument16 pagesStrengthening of Reinforced Concrete Beams Using FRP Technique: A ReviewHÙNG Trần MạnhNo ratings yet
- 2005 - Theoretical Analysis of Dehumidification Process in A Desiccant WheelDocument10 pages2005 - Theoretical Analysis of Dehumidification Process in A Desiccant WheelzebrazerozeroNo ratings yet
- Za 45-185 PDFDocument72 pagesZa 45-185 PDFSharad KokateNo ratings yet
- Agma 9112 - A04Document41 pagesAgma 9112 - A04FARIBA100% (2)
- 1-Fundamentals of Creep in MaterialsDocument6 pages1-Fundamentals of Creep in MaterialsLucianoBorasiNo ratings yet
- Important RCC Questions-Short and LongDocument15 pagesImportant RCC Questions-Short and LongmailjoelsamuelNo ratings yet