You might also like
- C# For Beginners: An Introduction to C# Programming with Tutorials and Hands-On ExamplesFrom EverandC# For Beginners: An Introduction to C# Programming with Tutorials and Hands-On ExamplesNo ratings yet
- F Delmo DC ManualDocument53 pagesF Delmo DC ManualOks OkiNo ratings yet
- Simulink4Orocos: User ManualDocument9 pagesSimulink4Orocos: User Manualrgx112No ratings yet
- Introduction to wireless sensor networks with 6LoWPAN and ContikiDocument22 pagesIntroduction to wireless sensor networks with 6LoWPAN and ContikiAleksandar VelinovNo ratings yet
- Getting Started with CodeWarrior IDEDocument16 pagesGetting Started with CodeWarrior IDENaumanNo ratings yet
- TouchGFX AtollicDocument14 pagesTouchGFX Atollichanifmohammed85No ratings yet
- Veins DocumentationDocument52 pagesVeins DocumentationR AnwarNo ratings yet
- Asm LinuxDocument23 pagesAsm LinuxKerbela HüseyinNo ratings yet
- ToolsDocument26 pagesToolscaniphpNo ratings yet
- NETVOLC (Version 1.1) : User ManualDocument11 pagesNETVOLC (Version 1.1) : User ManualJS AbadiaNo ratings yet
- Modern GPUDocument221 pagesModern GPUx2y2z2rmNo ratings yet
- Good Omnet++ TutorialDocument11 pagesGood Omnet++ TutorialalzamannNo ratings yet
- Getting Started With CodeWarrior IDE From FreescaleDocument8 pagesGetting Started With CodeWarrior IDE From FreescaleIonela100% (1)
- ADS Tutorial: A Beginners Tutorial: Modes of OperationDocument23 pagesADS Tutorial: A Beginners Tutorial: Modes of OperationShakil Ahmed ChowdhuryNo ratings yet
- ADS Tutorial: A Beginners Tutorial: Modes of OperationDocument13 pagesADS Tutorial: A Beginners Tutorial: Modes of OperationYounes Ait El MaatiNo ratings yet
- Panduan FMDocument24 pagesPanduan FMridwan kusnandarNo ratings yet
- Omnet++ Computer Network Design Lab ManualDocument22 pagesOmnet++ Computer Network Design Lab ManualNormalia SamianNo ratings yet
- Win32 API InterceptorDocument40 pagesWin32 API InterceptorComputer Guru100% (2)
- Simcnc Python Scripts Guide enDocument53 pagesSimcnc Python Scripts Guide enÁron SzárazNo ratings yet
- System Verilog Interview QuestionDocument16 pagesSystem Verilog Interview QuestionAviraj GhanekarNo ratings yet
- Eee 3210Document79 pagesEee 3210alihossenvoltaNo ratings yet
- Writing Module Drivers For Linux-2.6.x: Embedded Realtime SoftwareDocument11 pagesWriting Module Drivers For Linux-2.6.x: Embedded Realtime Softwarejanagaraj8No ratings yet
- DD Flow TutorialDocument75 pagesDD Flow TutorialSreekanth PagadapalliNo ratings yet
- Simulink Code GenerationDocument45 pagesSimulink Code GenerationKen LeNo ratings yet
- Keil Emulator For C166 InfeneonDocument31 pagesKeil Emulator For C166 Infeneonciwic85343No ratings yet
- Lab Project 1Document8 pagesLab Project 1Jacie GrowNo ratings yet
- BEC7L1 - Digital Cmos Vlsi-LabDocument66 pagesBEC7L1 - Digital Cmos Vlsi-LabRamkumardevendiranDevenNo ratings yet
- RIP Riverbed LabDocument13 pagesRIP Riverbed LabnekaNo ratings yet
- RIP: Routing Information Protocol: A Routing Protocol Based On The Distance-Vector AlgorithmDocument11 pagesRIP: Routing Information Protocol: A Routing Protocol Based On The Distance-Vector AlgorithmAsadingNo ratings yet
- #2.5. Monitoring of Analog InputsDocument24 pages#2.5. Monitoring of Analog InputsNaufal Reyhan FadhilNo ratings yet
- ATMELDocument5 pagesATMELAnandPrakashNo ratings yet
- Training 2Document44 pagesTraining 2Baluvu Jagadish100% (1)
- Driver AIDocument10 pagesDriver AIDelhi On RoadNo ratings yet
- EC6612 - VLSI Design Laboratory ManualDocument39 pagesEC6612 - VLSI Design Laboratory ManualSriramNo ratings yet
- Principles of System Software: Aditya Roy KarmakarDocument11 pagesPrinciples of System Software: Aditya Roy KarmakarAditya Roy karmakarNo ratings yet
- CS312 Lab manual Chapter 7: Assembly language programmingDocument13 pagesCS312 Lab manual Chapter 7: Assembly language programmingfeezy1No ratings yet
- Linux Device Driver DesignDocument8 pagesLinux Device Driver DesignhibouvnNo ratings yet
- Lab 6 RIPDocument13 pagesLab 6 RIPDanilo MolinaNo ratings yet
- C Programming in UnixDocument38 pagesC Programming in UnixWatsh Rajneesh80% (5)
- ADS Tutorial: A Beginners Tutorial: Modes of OperationDocument22 pagesADS Tutorial: A Beginners Tutorial: Modes of OperationFredCamoneNo ratings yet
- Curses Programming With Python: Table Des MatièresDocument8 pagesCurses Programming With Python: Table Des Matièresvido DOSSEHNo ratings yet
- Cooja 1Document7 pagesCooja 1Đông thành đạiNo ratings yet
- Object Oriented Programming Language Using C++Document14 pagesObject Oriented Programming Language Using C++monimonikamanjunathNo ratings yet
- Vlsi Manual 2013-2014Document36 pagesVlsi Manual 2013-2014hr_suresh_kNo ratings yet
- Writing Device DriversDocument24 pagesWriting Device DriversmohitguptaNo ratings yet
- Exp 9Document9 pagesExp 9Peeyush ChaurasiaNo ratings yet
- Smart Contract Automated Testing GuidelinesDocument7 pagesSmart Contract Automated Testing GuidelinesloclubuNo ratings yet
- Wireless Simulation With QualnetDocument16 pagesWireless Simulation With Qualnetkdilip05No ratings yet
- Lab-AR-2-Jueves 24Document11 pagesLab-AR-2-Jueves 24Syd BarrettNo ratings yet
- LAB 3-converted (2)Document10 pagesLAB 3-converted (2)Usman KianiNo ratings yet
- TutorialDocument48 pagesTutorialPalash PhukanNo ratings yet
- Scicos Vs SimulinkDocument65 pagesScicos Vs SimulinkaalbieroNo ratings yet
- VLSIDocument65 pagesVLSIChandrashekarNo ratings yet
- Cmos Vlsi Design Lab 1: Cell Design and Verification: I. An Overview of VLSI CAD ToolsDocument20 pagesCmos Vlsi Design Lab 1: Cell Design and Verification: I. An Overview of VLSI CAD ToolsHaris RasoolNo ratings yet
- BigDFT User Manual: Installation and StructureDocument35 pagesBigDFT User Manual: Installation and StructureSunghyun KimNo ratings yet
- DSP Lab Manual 15-11-2016 PDFDocument73 pagesDSP Lab Manual 15-11-2016 PDFsmdeepajpNo ratings yet
- Howto CursesDocument8 pagesHowto CursesMehrdad Noei AghaeiNo ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- Solidwork A BajarDocument1 pageSolidwork A BajarLuis GonzalesNo ratings yet
- Que Viva La MúsicaDocument1 pageQue Viva La MúsicaLuis GonzalesNo ratings yet
- JK Rowling: Writer of The Novel Harry PotterDocument1 pageJK Rowling: Writer of The Novel Harry PotterLuis GonzalesNo ratings yet
- Que Viva La MúsicaDocument1 pageQue Viva La MúsicaLuis GonzalesNo ratings yet
- PG Gaming x12-58710-03 Na en XC FR EsDocument25 pagesPG Gaming x12-58710-03 Na en XC FR EsAlexandre Junior SchererNo ratings yet
- Manual Pic18f4550 MicrochipDocument438 pagesManual Pic18f4550 MicrochipcacasecacacasecaNo ratings yet
- Ds 256 288mb e Die Rimm May 2004 PDFDocument16 pagesDs 256 288mb e Die Rimm May 2004 PDFLuis GonzalesNo ratings yet
- Japanese Literature As World Literature - Visceral Engagement PDFDocument253 pagesJapanese Literature As World Literature - Visceral Engagement PDFMonica TamașNo ratings yet
- Test - A INTER 2ND - Luis Cristóbal Aguilar AlcocerDocument5 pagesTest - A INTER 2ND - Luis Cristóbal Aguilar AlcocerCris AlcocerNo ratings yet
- Systematic Review of The Frog Family Hylidae, With SpecialDocument240 pagesSystematic Review of The Frog Family Hylidae, With Specialjack kingNo ratings yet
- Esl Transitive Verbs PDFDocument3 pagesEsl Transitive Verbs PDFVicky Benitez100% (1)
- Peter Sestoft KVL and IT University of Copenhagen: The TeacherDocument8 pagesPeter Sestoft KVL and IT University of Copenhagen: The TeacherArnaeemNo ratings yet
- Evangelio en GriegoDocument169 pagesEvangelio en GriegoOctavio AlonsoNo ratings yet
- Romantic Literature Thesis IdeasDocument6 pagesRomantic Literature Thesis Ideasxgkeiiygg100% (3)
- A Brief History of The ComputerDocument70 pagesA Brief History of The ComputerUjang KasepNo ratings yet
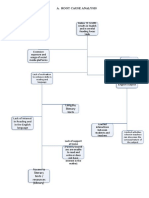
- Project REAP-Root Cause AnalysisDocument4 pagesProject REAP-Root Cause AnalysisAIRA NINA COSICONo ratings yet
- SMA IPIEMS SURABAYA - Modul Ajar Bhs Inggris TK LanjutDocument8 pagesSMA IPIEMS SURABAYA - Modul Ajar Bhs Inggris TK LanjutI Gde Rama Putra YudaNo ratings yet
- Sweet Goodmorning MessageDocument7 pagesSweet Goodmorning MessageKatheryn WinnickNo ratings yet
- Islamic StudiesDocument7 pagesIslamic StudiesShafeeq HakeemNo ratings yet
- Commentary of Suratul JinnDocument160 pagesCommentary of Suratul JinnSaleem Bhimji100% (3)
- Kinds of Nouns: Judea Mae V. Española Iii-Bsed2Document33 pagesKinds of Nouns: Judea Mae V. Española Iii-Bsed2Mica de JesusNo ratings yet
- Unit 2Document106 pagesUnit 2Alex SonNo ratings yet
- Actual4Test: Actual4test - Actual Test Exam Dumps-Pass For IT ExamsDocument4 pagesActual4Test: Actual4test - Actual Test Exam Dumps-Pass For IT ExamsXuân Lê Thị HồngNo ratings yet
- Project SynopsisDocument9 pagesProject Synopsisshruti raiNo ratings yet
- The Society of Biblical LiteratureDocument25 pagesThe Society of Biblical LiteratureAngela NatelNo ratings yet
- DLL - English 4 - Q4 - W9Document4 pagesDLL - English 4 - Q4 - W9Roemyr BellezasNo ratings yet
- Link L7 U1 Unit TestDDocument2 pagesLink L7 U1 Unit TestDMal SwierNo ratings yet
- C# Coding Standards and Best Programming PracticesDocument58 pagesC# Coding Standards and Best Programming PracticesKiran PatilNo ratings yet
- Prayers (Dua), Mannat and NazarDocument41 pagesPrayers (Dua), Mannat and NazarIbrahima SakhoNo ratings yet
- Adult Sts Lesson 84 Census of Israel and Duties of The LevitesDocument4 pagesAdult Sts Lesson 84 Census of Israel and Duties of The LevitesDaniel enuabanosaNo ratings yet
- PBL AssignmentDocument2 pagesPBL AssignmentFaseeh HyderNo ratings yet
- Color Computer Rainbow Magazine 1982Document32 pagesColor Computer Rainbow Magazine 1982rbihlerNo ratings yet
- Adjectives of Opinion CrosswordDocument3 pagesAdjectives of Opinion CrosswordVivien VíghNo ratings yet
- Activity in Module 17Document2 pagesActivity in Module 17Minnie WagsinganNo ratings yet
- LAST DAYS Topical Bible StudyDocument6 pagesLAST DAYS Topical Bible StudyAngela FurisNo ratings yet
- 1 Chapter 16 Software ReuseDocument52 pages1 Chapter 16 Software ReuseSalah AlaaNo ratings yet
- Life.: Zarlino, Gioseffo (Gioseffe)Document10 pagesLife.: Zarlino, Gioseffo (Gioseffe)Jorge Pérez PérezNo ratings yet