You might also like
- 73 FTP PDFDocument17 pages73 FTP PDFCristi BudauNo ratings yet
- Tents, Cable Nets and Grid Shells PDFDocument69 pagesTents, Cable Nets and Grid Shells PDFCristi BudauNo ratings yet
- IASS98Document8 pagesIASS98Cristi BudauNo ratings yet
- Math T 2Document13 pagesMath T 2Sarman TamilselvanNo ratings yet
- IASS Fabric PaperDocument8 pagesIASS Fabric PaperCristi BudauNo ratings yet
- 2013062068087193Document8 pages2013062068087193Cristi BudauNo ratings yet
- 0354 51801503651RDocument10 pages0354 51801503651RCristi BudauNo ratings yet
- 04 TensileDocument69 pages04 TensileCristi BudauNo ratings yet
- Dynamic Analysis of Cable Roofs Under Transient Wind: A Comparison Between Time Domain and Frequency Domain ApproachesDocument5 pagesDynamic Analysis of Cable Roofs Under Transient Wind: A Comparison Between Time Domain and Frequency Domain ApproachesCristi BudauNo ratings yet
- Arwade Schafer Paper 09Document16 pagesArwade Schafer Paper 09Cristi BudauNo ratings yet
- 592009.full Paper PetraDocument8 pages592009.full Paper PetraCristi BudauNo ratings yet
- Airsculpt Tensile DownloadDocument6 pagesAirsculpt Tensile DownloadCristi BudauNo ratings yet
- Extended Force Density Method and Its ExpressionsDocument17 pagesExtended Force Density Method and Its ExpressionsGhada KhalilNo ratings yet
- 6 2 Hegyihinczmiktex v6n2Document17 pages6 2 Hegyihinczmiktex v6n2Cristi BudauNo ratings yet
- Nonlinear Analysis of Cable Systems With Point Based Iterative MethodDocument14 pagesNonlinear Analysis of Cable Systems With Point Based Iterative MethodKtk ZadNo ratings yet
- 2012 Ijss Veenendaal Block 1380094819Document13 pages2012 Ijss Veenendaal Block 1380094819denis1808scribdNo ratings yet
- Cable Structure With Load-Adapting Geometry: Julich@enpc - Lami.fr Caron@enpc - Lami.fr Baverel@Document8 pagesCable Structure With Load-Adapting Geometry: Julich@enpc - Lami.fr Caron@enpc - Lami.fr Baverel@Cristi BudauNo ratings yet
- Bletzinger 162Document13 pagesBletzinger 162Cristi BudauNo ratings yet
- 267 MS10 Abs 1954Document8 pages267 MS10 Abs 1954Cristi BudauNo ratings yet
- What Is New V.3.7: Designing With FormfinderDocument26 pagesWhat Is New V.3.7: Designing With FormfinderPierre BadiaNo ratings yet
- C 0706Document10 pagesC 0706Cristi BudauNo ratings yet
- 5Document16 pages5Cristi BudauNo ratings yet
- CIB10896Document5 pagesCIB10896Cristi BudauNo ratings yet
- 786 Ce014Document10 pages786 Ce014Cristi BudauNo ratings yet
- Eurocode 7 Geotechnical Design Worked ExamplesDocument172 pagesEurocode 7 Geotechnical Design Worked ExamplesJevgenijs Kolupajevs100% (1)
- 385Document14 pages385Cristi BudauNo ratings yet
- Vol7no4 1Document17 pagesVol7no4 1Cristi BudauNo ratings yet
- Sistem Desktop Serioux Power V11 Cu Procesor Intel® Core™ I5-4460 3.2GHz Haswell, 8GB RAM, 1TB HDD, NVIDIA GTX 750 OC 2GB - eMAGDocument2 pagesSistem Desktop Serioux Power V11 Cu Procesor Intel® Core™ I5-4460 3.2GHz Haswell, 8GB RAM, 1TB HDD, NVIDIA GTX 750 OC 2GB - eMAGCristi BudauNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Creep Testing Kappa SSDocument2 pagesCreep Testing Kappa SSGustavo LealNo ratings yet
- Photoluminescence and Photocatalytic Activity of Spin Coated Ag+ Doped Anatase TiO2 Thin FilmsDocument14 pagesPhotoluminescence and Photocatalytic Activity of Spin Coated Ag+ Doped Anatase TiO2 Thin FilmsJasielRuizDesalesNo ratings yet
- An Improved Quadrilateral Flat Element With Drilling Degrees of Freedom For Shell Structural AnalysisDocument35 pagesAn Improved Quadrilateral Flat Element With Drilling Degrees of Freedom For Shell Structural AnalysisDaniele Di LucaNo ratings yet
- Self-Powered Psychotronic GeneratorDocument5 pagesSelf-Powered Psychotronic GeneratorevandrojsilvaNo ratings yet
- Fluid Dynamics FinalDocument330 pagesFluid Dynamics FinalgollakotiNo ratings yet
- Inertia FormulasDocument4 pagesInertia FormulasLoysa Agtarap MataNo ratings yet
- 3.concurrent Force SystemDocument22 pages3.concurrent Force SystemNayim InamdarNo ratings yet
- Microwave Solvothermal Synthesis and Characterization of Manganese-Doped Zno NanoparticlesDocument12 pagesMicrowave Solvothermal Synthesis and Characterization of Manganese-Doped Zno NanoparticlesTamilan TamilNo ratings yet
- Analytical Methods For The Stress Concentration Analysis of Multilayered Anisotropic Composites With Pin-Loaded HolesDocument2 pagesAnalytical Methods For The Stress Concentration Analysis of Multilayered Anisotropic Composites With Pin-Loaded Holesredmod79No ratings yet
- IEEE-A Primer On Capacitor Bank Protection PDFDocument6 pagesIEEE-A Primer On Capacitor Bank Protection PDFGustavo AguayoNo ratings yet
- WIND TUNNEL NotesDocument173 pagesWIND TUNNEL Notessrikar100% (1)
- 3.A - The First Law of Thermodynamics (Answer) - Physics LibreTextsDocument5 pages3.A - The First Law of Thermodynamics (Answer) - Physics LibreTextsFASIKAW GASHAWNo ratings yet
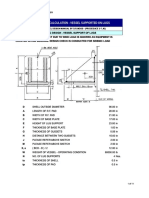
- Vessel seismic design calculationDocument11 pagesVessel seismic design calculationinnovativekarthiNo ratings yet
- Assignment#3Document2 pagesAssignment#3Amit SinghNo ratings yet
- Cam Clay and Modified Cam Clay Material Models ExplainedDocument11 pagesCam Clay and Modified Cam Clay Material Models ExplainedJonathan TeixeiraNo ratings yet
- United States Patent: (10) Patent No.: US 7482,597 B2Document22 pagesUnited States Patent: (10) Patent No.: US 7482,597 B2JustaUser2No ratings yet
- Thermodynamic Principles and Ideal Gas FunctionsDocument17 pagesThermodynamic Principles and Ideal Gas FunctionsLê Xuân NamNo ratings yet
- EE 1302 – PROTECTION & SWITCHGEAR Question BankDocument6 pagesEE 1302 – PROTECTION & SWITCHGEAR Question BankRameez FaroukNo ratings yet
- Math 250B Lectures NotesDocument146 pagesMath 250B Lectures NotessaudehmadNo ratings yet
- 44-4345CAT SensorsAndEmittersInfraredSensingDocument48 pages44-4345CAT SensorsAndEmittersInfraredSensingwowbagger02No ratings yet
- Electromagnetic Fields and WavesDocument138 pagesElectromagnetic Fields and WavesSreejaNo ratings yet
- (William L. Kruer) The Physics of Laser Plasma IntDocument29 pages(William L. Kruer) The Physics of Laser Plasma IntVijay SinghNo ratings yet
- NMR Spectroscopy Integrals and MultiplicityDocument6 pagesNMR Spectroscopy Integrals and MultiplicitysupriyoNo ratings yet
- U-Tube ManometerDocument5 pagesU-Tube ManometerHarold Lee BolingetNo ratings yet
- An Examination of Engine Effects On HelicopterDocument10 pagesAn Examination of Engine Effects On HelicoptershyjusnairNo ratings yet
- Chapter 1-Electric FieldDocument33 pagesChapter 1-Electric FieldThông LêNo ratings yet
- ME 218 - Spring 2018 - Week05 HandoutDocument7 pagesME 218 - Spring 2018 - Week05 HandoutNitin BhatiNo ratings yet
- GP 1 Module 4Document91 pagesGP 1 Module 4Raymund EspinoNo ratings yet
- Basic Tubing ForcesDocument21 pagesBasic Tubing ForcesOzzie GonzalezNo ratings yet