You might also like
- Materials 10 00630Document20 pagesMaterials 10 00630Jobin VargheseNo ratings yet
- Instructions For Writting A Good ParagraphDocument1 pageInstructions For Writting A Good ParagraphJobin VargheseNo ratings yet
- Three-Phase Asynchronous MotorsDocument46 pagesThree-Phase Asynchronous Motorswartsil100% (4)
- IELTS Writing Band Descriptors Task 1Document1 pageIELTS Writing Band Descriptors Task 1IELTS Online Practice100% (3)
- Delp Opensim 2007Document11 pagesDelp Opensim 2007Daniel Araya RochaNo ratings yet
- QqwweeDocument1 pageQqwweeJobin VargheseNo ratings yet
- DE73Bd01 (Mekanika)Document30 pagesDE73Bd01 (Mekanika)Princess ViolitaNo ratings yet
- Guidelines & Format FOR Submission of Project Proposals: Under The SchemeDocument16 pagesGuidelines & Format FOR Submission of Project Proposals: Under The SchemeBabug RaoNo ratings yet
- Rotation PaperDocument5 pagesRotation PaperJobin VargheseNo ratings yet
- Induction MotorDocument13 pagesInduction MotorJobin VargheseNo ratings yet
- Assessment Criteria - WRITING TASK 2 - Band DescriptorsDocument1 pageAssessment Criteria - WRITING TASK 2 - Band DescriptorsIbrahim Babatunde Oladapo100% (1)
- Clear Explanation On Dynamic ModelDocument171 pagesClear Explanation On Dynamic ModelJobin VargheseNo ratings yet
- Structure Introduction BestDocument46 pagesStructure Introduction BestAbraham JyothimonNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentJobin VargheseNo ratings yet
- Egg CurryDocument2 pagesEgg CurryJobin VargheseNo ratings yet
- Baaji IngredientsDocument1 pageBaaji IngredientsJobin VargheseNo ratings yet
- Art - 10.1007 - s10853 013 7451 1Document9 pagesArt - 10.1007 - s10853 013 7451 1Jobin VargheseNo ratings yet
- Mutta CurryDocument1 pageMutta CurryJobin VargheseNo ratings yet
- FfghredDocument1 pageFfghredJobin VargheseNo ratings yet
- 789 oDocument1 page789 oJobin VargheseNo ratings yet
- Three-Dimensional Kinematics and Kinetics of Total Knee Arthroplasty During Level Walking Using Single Plane Video-Fluoroscopy and Force Plates: A Pilot StudyDocument7 pagesThree-Dimensional Kinematics and Kinetics of Total Knee Arthroplasty During Level Walking Using Single Plane Video-Fluoroscopy and Force Plates: A Pilot StudySocratis KomarisNo ratings yet
- Aas 123Document1 pageAas 123Jobin VargheseNo ratings yet
- 13Document1 page13Jobin VargheseNo ratings yet
- AbcdsDocument24 pagesAbcdsJobin VargheseNo ratings yet
- A Comparative Study of Effect of Accumulation of Wear Debris On Knee and Hip Movements Using Mathematical Wear ModelDocument1 pageA Comparative Study of Effect of Accumulation of Wear Debris On Knee and Hip Movements Using Mathematical Wear ModelJobin VargheseNo ratings yet
- Carticel ACI Rehabilitation GuideDocument18 pagesCarticel ACI Rehabilitation GuidematameaNo ratings yet
- 1 s2.0 S0141391004004069 Main 1Document9 pages1 s2.0 S0141391004004069 Main 1Jobin VargheseNo ratings yet
- 7Document1 page7Jobin VargheseNo ratings yet
- 3Document1 page3Jobin VargheseNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Integrated Control of Braking and SteeringDocument10 pagesIntegrated Control of Braking and SteeringakkkkNo ratings yet
- Thern Ta2 Air Winch PressDocument2 pagesThern Ta2 Air Winch PressKiat LimNo ratings yet
- TM 9-707 (1943)Document451 pagesTM 9-707 (1943)degardin lucNo ratings yet
- Owner'S Manual & Competition Handbook Competition HandbookDocument164 pagesOwner'S Manual & Competition Handbook Competition HandbookAgape SniperNo ratings yet
- Supply Chain Map v2Document19 pagesSupply Chain Map v2rajayu20002724No ratings yet
- Catalog 40 Spare PartsDocument54 pagesCatalog 40 Spare PartsMiticaVladNo ratings yet
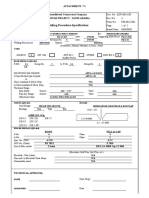
- Consolidated Contractors Welding Procedure SpecificationDocument3 pagesConsolidated Contractors Welding Procedure Specificationsiva8000100% (1)
- BH35 2Document4 pagesBH35 2Bipin KumarNo ratings yet
- Design and Development of Car Suspension Lower Arm: December 2015Document8 pagesDesign and Development of Car Suspension Lower Arm: December 2015Sami Onur VuralNo ratings yet
- Parts Manual Current Products I21Document166 pagesParts Manual Current Products I21juancglugoNo ratings yet
- Forced Convection from a Circular CylinderDocument11 pagesForced Convection from a Circular CylinderSharath SharuNo ratings yet
- REE 6031 Tutorial 1Document5 pagesREE 6031 Tutorial 1Eng Maboshe Charles Namafe0% (1)
- Catalogue: Creative SpiritDocument88 pagesCatalogue: Creative Spiritedy105No ratings yet
- DK2000 EngDocument15 pagesDK2000 EngRajan MullappillyNo ratings yet
- Kr451 Nepiro Ergo PR enDocument4 pagesKr451 Nepiro Ergo PR enForum PompieriiNo ratings yet
- Get TRDocDocument238 pagesGet TRDocShev PanushkinNo ratings yet
- BQ Rmu PlinthDocument3 pagesBQ Rmu Plinthaqeel_al_triniNo ratings yet
- 3210Q011 04gb PDFDocument2 pages3210Q011 04gb PDFDenim102100% (1)
- Dehumidifcation and CoolingDocument3 pagesDehumidifcation and CoolingWaleed A. ShreimNo ratings yet
- Archimedes PrincipleDocument4 pagesArchimedes Principleraviteja036No ratings yet
- OMM Volvo Penta TAD 851 VE PDFDocument78 pagesOMM Volvo Penta TAD 851 VE PDFHariyono Busro100% (5)
- Genuine: Choose Every Time!Document40 pagesGenuine: Choose Every Time!DinamikaMarine50% (2)
- Automatic TransmissionDocument387 pagesAutomatic Transmissionadialfian2306No ratings yet
- Syngas Gas Train Schematic and Spare Parts ListDocument4 pagesSyngas Gas Train Schematic and Spare Parts ListShamshuddin TanekhanNo ratings yet
- Cooler BalanceDocument16 pagesCooler BalanceIrfan Ahmed100% (1)
- QF Qa 42 Physical Test ReportDocument73 pagesQF Qa 42 Physical Test ReportVikas Mani TripathiNo ratings yet
- Sany Grader Parts ManualDocument436 pagesSany Grader Parts ManualJohnson Lee93% (14)
- 2022.08.08 Fabrication and Installation Steel StructureDocument21 pages2022.08.08 Fabrication and Installation Steel StructureArifian NugrohoNo ratings yet
- Thermodynamics 2 Module #2 Rankine CycleDocument19 pagesThermodynamics 2 Module #2 Rankine CycleJohn Rexel CaroNo ratings yet
- PMDC Motor Guide: Everything You Need to KnowDocument7 pagesPMDC Motor Guide: Everything You Need to KnowJesse Jones Seraspe100% (1)