You might also like
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesFrom EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesNo ratings yet
- Poulies Et Courroies de Transmission: Entraînement Par AdhérenceDocument26 pagesPoulies Et Courroies de Transmission: Entraînement Par AdhérenceWalid BelaaziNo ratings yet
- Transmettre Avec Modification de La Vitesse ReducteursDocument10 pagesTransmettre Avec Modification de La Vitesse ReducteursKarim Dorgham0% (1)
- Evaluation - Ajustements - Vrin Bosch - LvesDocument6 pagesEvaluation - Ajustements - Vrin Bosch - Lveskililibenali100% (1)
- Transmettre-2SMB Eleve 2014Document81 pagesTransmettre-2SMB Eleve 2014mdrougui100% (8)
- Exercice Ajustements eDocument3 pagesExercice Ajustements eMohsen SaidiNo ratings yet
- Dossier Technique Cric HydrauliqueDocument6 pagesDossier Technique Cric HydrauliqueYousfi Wahid100% (1)
- Les Embrayages1Document14 pagesLes Embrayages1Ghayth BouzayaniNo ratings yet
- Cours Génie Mécanique 3ème AnnéeDocument272 pagesCours Génie Mécanique 3ème Annéentayoub100% (1)
- 28-Guidage en RotationDocument29 pages28-Guidage en Rotationyassine22100% (2)
- Evaluation Roulement AjustementDocument1 pageEvaluation Roulement AjustementElla Kabongo100% (2)
- FabricationMecaniqueS4LicenceGM PDFDocument64 pagesFabricationMecaniqueS4LicenceGM PDFImap FinnNo ratings yet
- Cours Fabrication Chapitre Tournage Et FraisageDocument33 pagesCours Fabrication Chapitre Tournage Et Fraisagelekouf43100% (2)
- Cours CM1 2014 2015Document172 pagesCours CM1 2014 2015matozo100% (3)
- I-Mise en Situation:: (Voir Livre de TP Page 19) ConclusionDocument3 pagesI-Mise en Situation:: (Voir Livre de TP Page 19) Conclusionhammamin2008No ratings yet
- CPAV-Ex2 Emb-Frein PDFDocument5 pagesCPAV-Ex2 Emb-Frein PDFHanane TounsiNo ratings yet
- Cahier Meca 4 ST PDFDocument150 pagesCahier Meca 4 ST PDFtayahi100% (1)
- 01-Lecon1 Analyse Fonctionnelle 2012-13Document8 pages01-Lecon1 Analyse Fonctionnelle 2012-13Med Aymen Bensalem100% (1)
- Les Specifications DimensionnellesDocument3 pagesLes Specifications Dimensionnellesmido100% (1)
- Examen de Conception Mecanique 2009 CorrigeDocument16 pagesExamen de Conception Mecanique 2009 Corrigebhsbhs19No ratings yet
- 17 TransformationDocument10 pages17 TransformationMohamed NaciriNo ratings yet
- Cours de Technologie de Construction Mecanique Repare 1Document112 pagesCours de Technologie de Construction Mecanique Repare 1Youssef NajihNo ratings yet
- 4-Les FreinsDocument13 pages4-Les FreinsChokri AtefNo ratings yet
- Calcul Des ArbresDocument8 pagesCalcul Des ArbresKamel Bousnina100% (1)
- FAO Manuel Elève 1-3Document71 pagesFAO Manuel Elève 1-3Y ENo ratings yet
- Cours Liaisons Schema CinematiqueDocument20 pagesCours Liaisons Schema CinematiquekimNo ratings yet
- Accouplements Embrayage ApplicationsDocument5 pagesAccouplements Embrayage ApplicationsdjalikadjouNo ratings yet
- 19 Cours Transmission de MouvementDocument4 pages19 Cours Transmission de MouvementAli HAJBINo ratings yet
- TP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFDocument6 pagesTP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFKarim Kilani100% (2)
- Ch2 Ordre de Montage Et de Demontage PDFDocument4 pagesCh2 Ordre de Montage Et de Demontage PDFMohamed100% (1)
- Analyse Des Systemes MécaniqueDocument30 pagesAnalyse Des Systemes MécaniqueFirass Chafai100% (2)
- M03 Fabrication de Pièces D'usinage Simple en TournageDocument73 pagesM03 Fabrication de Pièces D'usinage Simple en TournageJawad Eddaiki83% (6)
- Liaison EncastrementDocument9 pagesLiaison Encastrementsaded05No ratings yet
- 2cahiermeca4stpart1 PDFDocument74 pages2cahiermeca4stpart1 PDFMrnadhir MecaniqueNo ratings yet
- SciesauteusecorrectionDocument3 pagesSciesauteusecorrectionyumiNo ratings yet
- Résumé TransmettreDocument18 pagesRésumé TransmettreMehdi Ben Zouine100% (3)
- 19 Reducteur MultiplicateurDocument10 pages19 Reducteur MultiplicateurYoussef Trimech100% (3)
- Exercices PDFDocument9 pagesExercices PDFerzrzretgertfertgeNo ratings yet
- Fraisage 2Document102 pagesFraisage 2mouhamed_hachem100% (5)
- b13 Guidage en RotationDocument7 pagesb13 Guidage en Rotationncibm67% (3)
- TP FiletageDocument5 pagesTP FiletageSaid Djaballah100% (2)
- Actions MécaniquesDocument19 pagesActions MécaniquesBen Fah100% (1)
- Ch2 Ordre de Montage Et de DemontageDocument4 pagesCh2 Ordre de Montage Et de DemontageRamzi Mansouri0% (1)
- Guidage en Rotation Par RoulementDocument2 pagesGuidage en Rotation Par RoulementMIMFS100% (1)
- Roue Et Vis Sans FinDocument11 pagesRoue Et Vis Sans FinZAKAR118067% (6)
- 34 Reducteur PDFDocument2 pages34 Reducteur PDFgilbertogato100% (3)
- TD 4 Réducteur Par EngrenagesDocument4 pagesTD 4 Réducteur Par EngrenagesYacouba OuedraogoNo ratings yet
- Chapitre 01 - Accouplments PDFDocument41 pagesChapitre 01 - Accouplments PDFferyel raissiNo ratings yet
- La Genie Mecanique-IsetDocument170 pagesLa Genie Mecanique-Isetyassinebouazzi100% (4)
- Cours 4eme Tech 21-22 PDFDocument75 pagesCours 4eme Tech 21-22 PDFAziz OuazNo ratings yet
- Projet BFUP FinalDocument28 pagesProjet BFUP FinalSimon MoreauNo ratings yet
- 02 EncastrementDocument19 pages02 EncastrementAsmae BtlNo ratings yet
- Transmission MecaniquesDocument147 pagesTransmission MecaniquesfefeNo ratings yet
- Ressorts: GénéralitésDocument20 pagesRessorts: GénéralitésSergio KhayatNo ratings yet
- Calcul Dynamique D'un Portique en AcierDocument39 pagesCalcul Dynamique D'un Portique en Acierlandrympoba80No ratings yet
- TD 22 Frottement Et AdhérenceDocument39 pagesTD 22 Frottement Et AdhérenceMaxime BequetNo ratings yet
- Tech Manual PDFDocument136 pagesTech Manual PDFAbdelaliNo ratings yet
- CPT 01Document12 pagesCPT 01Nadia DridiNo ratings yet
- r5 03 21Document16 pagesr5 03 21Yassine GharssalliNo ratings yet
- Cours Microcontroleur PDFDocument45 pagesCours Microcontroleur PDFErragueb Moussaoui IdrissiNo ratings yet
- Choix de Matriaux PDFDocument6 pagesChoix de Matriaux PDFMajda El-aouniNo ratings yet
- Choix de Matriaux PDFDocument6 pagesChoix de Matriaux PDFMajda El-aouniNo ratings yet
- nrc017 Liaison Encastrement PDFDocument2 pagesnrc017 Liaison Encastrement PDFMajda El-aouniNo ratings yet
- Correction TD 1Document5 pagesCorrection TD 1noubissi pascakNo ratings yet
- 8fa57-Perforateur A Papier Avec CorrectionDocument3 pages8fa57-Perforateur A Papier Avec CorrectionMajda El-aouni100% (3)
- Formation GRAFCET Cours 13 PDFDocument42 pagesFormation GRAFCET Cours 13 PDFPaul DayangNo ratings yet
- Cours RDM2013FinalDocument65 pagesCours RDM2013FinalMajda El-aouniNo ratings yet
- Formation GRAFCET Cours 13 PDFDocument42 pagesFormation GRAFCET Cours 13 PDFPaul DayangNo ratings yet
- La Cotation FonctionnelleDocument7 pagesLa Cotation FonctionnelleToinou06100% (8)
- Allal El-Moussaoui CVDocument2 pagesAllal El-Moussaoui CVMajda El-aouniNo ratings yet
- 1 - Introduction Aux Problèmes de Conception PDFDocument25 pages1 - Introduction Aux Problèmes de Conception PDFMajda El-aouniNo ratings yet
- La Cotation FonctionnelleDocument14 pagesLa Cotation FonctionnelleMajda El-aouniNo ratings yet
- Exercise 2.5 Axes (2005-2006) Problem StatementDocument44 pagesExercise 2.5 Axes (2005-2006) Problem StatementMajda El-aouniNo ratings yet
- Maintenance Mecanique Generale PrintDocument170 pagesMaintenance Mecanique Generale PrintAL Hamza100% (1)
- Fiche Validation Stage2017 2018Document1 pageFiche Validation Stage2017 2018Majda El-aouniNo ratings yet
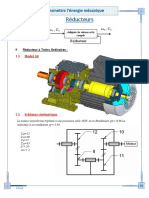
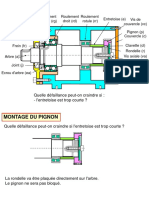
- Reducteur: Quelle Défaillance Peut-On Craindre Si: - L'entretoise Est Trop Courte ?Document26 pagesReducteur: Quelle Défaillance Peut-On Craindre Si: - L'entretoise Est Trop Courte ?Majda El-aouniNo ratings yet
- Cahier Des ChargesDocument1 pageCahier Des ChargesMajda El-aouniNo ratings yet
- Cahier Des ChargesDocument1 pageCahier Des ChargesMajda El-aouniNo ratings yet
- Cahier Des ChargesDocument4 pagesCahier Des ChargesMajda El-aouni0% (1)
- Ex Chainedenergie TCTDocument6 pagesEx Chainedenergie TCTMajda El-aouniNo ratings yet
- TP-Pièces en BoisDocument6 pagesTP-Pièces en BoisBen FahNo ratings yet
- TP-Pièces en BoisDocument6 pagesTP-Pièces en BoisBen FahNo ratings yet
- Chap 5Document62 pagesChap 5mouradkadiriNo ratings yet
- Mod2dtpro PDFDocument9 pagesMod2dtpro PDFMajda El-aouniNo ratings yet
- Pièce Jointe 1Document1 pagePièce Jointe 1Majda El-aouniNo ratings yet
- Applic1 Cor3Document10 pagesApplic1 Cor3Majda El-aouniNo ratings yet
- TD Automatique 1A JMD 2011Document20 pagesTD Automatique 1A JMD 2011Hajri MohamedNo ratings yet
- Cours TGDocument45 pagesCours TGRadia GanaNo ratings yet
- Voyage Du Jeune - Tome 3Document568 pagesVoyage Du Jeune - Tome 3Paula AranhaNo ratings yet
- Corr td1 PDFDocument3 pagesCorr td1 PDFBlewoussiNo ratings yet
- Evaluation Des Gains Dans Les Systèmes de Communication OptiqueDocument35 pagesEvaluation Des Gains Dans Les Systèmes de Communication OptiqueMichel GwosNo ratings yet
- Armorial Et Nobiliaire de L'ancien (... ) Foras Amédée Bpt6k65767241Document377 pagesArmorial Et Nobiliaire de L'ancien (... ) Foras Amédée Bpt6k65767241maza_poulppyNo ratings yet
- MC1.06 Metallurgie Generale Et Choix Des Materiaux 3jDocument1 pageMC1.06 Metallurgie Generale Et Choix Des Materiaux 3jGuillaumeNo ratings yet
- Cellule - Ultra - Cours PDFDocument6 pagesCellule - Ultra - Cours PDFAdaNo ratings yet
- Elasticité Chapitre 6Document21 pagesElasticité Chapitre 6Anis LepicNo ratings yet
- Iec 60372Document46 pagesIec 60372Luis Andres Pradenas FuentesNo ratings yet
- Fiche EnseignantDocument4 pagesFiche EnseignantWulfaNo ratings yet
- 03 Vocabulaire MetrologiqueDocument14 pages03 Vocabulaire MetrologiqueBouchedda YassineNo ratings yet
- 293 Conception de La Commande de Processus PopescuDocument295 pages293 Conception de La Commande de Processus PopescuSteve DemirelNo ratings yet
- Mini Projet UrbanismeDocument5 pagesMini Projet UrbanismeBadra Ali SanogoNo ratings yet
- Etude Et Conception D'une Centrale A BetonDocument60 pagesEtude Et Conception D'une Centrale A Betonjihenk100% (14)
- Mobilite InternationaleDocument2 pagesMobilite Internationalevettielle vettielleNo ratings yet
- Inbound MarketingDocument13 pagesInbound MarketingPaweł SajdekNo ratings yet
- Iso 14539Document42 pagesIso 14539David SouthgateNo ratings yet
- Correction Emd MR 2017 2018Document4 pagesCorrection Emd MR 2017 2018Benlouanas KamelNo ratings yet
- Note Technique de La Voie D'acces Principlae VFDocument21 pagesNote Technique de La Voie D'acces Principlae VFSanaaNo ratings yet
- Exercices D'algorithmique CorrigésDocument7 pagesExercices D'algorithmique Corrigésmaroua meskineNo ratings yet
- L3 TP JetDocument6 pagesL3 TP JetAmel HydNo ratings yet
- Chapitre 2-2Document15 pagesChapitre 2-2Reda BachnouNo ratings yet
- Uca2 1 1aDocument3 pagesUca2 1 1aMarieNo ratings yet
- Que Faut - Il Retenir Sur Les Nombres Complexes PDFDocument2 pagesQue Faut - Il Retenir Sur Les Nombres Complexes PDFMichaël Ronio BezandryNo ratings yet
- Glenn Murcutt - CompressedDocument12 pagesGlenn Murcutt - CompressedpianoNo ratings yet
- Ajp Jphyscol198142c119Document16 pagesAjp Jphyscol198142c119Wassini BensNo ratings yet
- Chapitre 5-Signature NumériqueDocument4 pagesChapitre 5-Signature NumériqueDO UANo ratings yet
- Exercices Correction Théorème de Pythagore 4èmeDocument3 pagesExercices Correction Théorème de Pythagore 4èmehaquenne.laurentNo ratings yet
- NCT Memento Rinaldo v2Document15 pagesNCT Memento Rinaldo v2Manmzel RaphaNo ratings yet
- Communiquer Communiquer: Figure 1: Deux Décompositions de La Tâche TDocument12 pagesCommuniquer Communiquer: Figure 1: Deux Décompositions de La Tâche The200gab100% (1)