You might also like
- Verificación de estructuras deformadas. TMVL0309From EverandVerificación de estructuras deformadas. TMVL0309Rating: 5 out of 5 stars5/5 (1)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209From EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Rating: 1 out of 5 stars1/5 (2)
- Investigación Grados de LibertadDocument10 pagesInvestigación Grados de LibertadJav RivNo ratings yet
- Conf. 1 Cinemática Avanzada Feb.12Document31 pagesConf. 1 Cinemática Avanzada Feb.12Maritza Rodriguez GualNo ratings yet
- MecanismosDocument4 pagesMecanismosSamuel HernandezNo ratings yet
- Mecanismo - Wikipedia, La Enciclopedia LibreDocument4 pagesMecanismo - Wikipedia, La Enciclopedia LibreJose ChambillaNo ratings yet
- Trabajo U1 y U2 MecanismosDocument16 pagesTrabajo U1 y U2 MecanismosMARCOS CASTILLONo ratings yet
- Practica 1, Conceptos Básicos Usados en Esquemas CinemáticosDocument10 pagesPractica 1, Conceptos Básicos Usados en Esquemas Cinemáticosjuan.maltos2004No ratings yet
- TEMA1Document9 pagesTEMA1Lucía Pardo HermosaNo ratings yet
- Trabajo de MecanismoDocument8 pagesTrabajo de MecanismoJosé Alberto Campos MartinezNo ratings yet
- Proyecto Primer Parcial.Document39 pagesProyecto Primer Parcial.marco antonio raya rosalesNo ratings yet
- Asignación Individual 1Document4 pagesAsignación Individual 1Selena BalsasNo ratings yet
- Mecanismo de BarrasDocument23 pagesMecanismo de BarrasJorge Antonio Silva RodriguezNo ratings yet
- Practic Asded in A MicaDocument37 pagesPractic Asded in A MicaCäcilie Buentelo100% (1)
- MecanismoDocument3 pagesMecanismoFrank Anderson Monja DuranNo ratings yet
- Cap1 Maquinas y Mecanismos Resumen ShigleyDocument10 pagesCap1 Maquinas y Mecanismos Resumen ShigleyPascual MaldonadoNo ratings yet
- Cuestionario #1 Analisis TopologicoDocument5 pagesCuestionario #1 Analisis TopologicoZacarias Vargas100% (1)
- Tarea 1 MecanismosDocument9 pagesTarea 1 Mecanismosleila loveNo ratings yet
- Conceptos Fundamentales de Máquinas y MecanismosDocument13 pagesConceptos Fundamentales de Máquinas y MecanismosHebert Alberto Rodríguez Cámara100% (1)
- MecanismosDocument5 pagesMecanismosCristian Eduardo Murillo CamarenaNo ratings yet
- Introduccion A Los Sistemas MecanicosDocument32 pagesIntroduccion A Los Sistemas MecanicosCoro GlenisNo ratings yet
- Unidad I - Diagrama Cinemático - Santaella YDocument11 pagesUnidad I - Diagrama Cinemático - Santaella YYsaac YhofrenNo ratings yet
- Mecanismo: Esto No Es Un Modelo de SuscripciónDocument4 pagesMecanismo: Esto No Es Un Modelo de Suscripciónruben darioNo ratings yet
- Cinematica de MecanismosDocument2 pagesCinematica de MecanismosYvala Zamora Percy100% (1)
- 5to Tema Mecanismo de Movimiento y AcoplamientoDocument6 pages5to Tema Mecanismo de Movimiento y Acoplamientojuancarlosdejesus578No ratings yet
- Apunte de clase V3 - Cinemática de Mecanismos 2024Document16 pagesApunte de clase V3 - Cinemática de Mecanismos 2024ceciNo ratings yet
- TMM UTP Clase 1 2 3Document55 pagesTMM UTP Clase 1 2 3Steven Vilchez AyalaNo ratings yet
- Generalidades de Los MecanismosDocument5 pagesGeneralidades de Los MecanismosRaymundo Gracia Reyna67% (3)
- Importancia y Aplicación Del Análisis de MecanismosDocument16 pagesImportancia y Aplicación Del Análisis de MecanismosAnderson Torres50% (2)
- 2do Trabajo MecanismosDocument11 pages2do Trabajo MecanismosRenato ZerpaNo ratings yet
- ASM Tema 1Document93 pagesASM Tema 1Anita MendietaNo ratings yet
- Laboratorio de Mecanismos 6MM2Document32 pagesLaboratorio de Mecanismos 6MM2leila loveNo ratings yet
- Clasificación de Pares CinemáticosDocument10 pagesClasificación de Pares CinemáticosBeto Del AngelNo ratings yet
- Unidad 1. - Introduccion A Los MecanismosDocument15 pagesUnidad 1. - Introduccion A Los Mecanismosnobamo100% (1)
- Unidad 2 MaquinasDocument8 pagesUnidad 2 MaquinasAntonio ReyesNo ratings yet
- Guía mecanismosDocument7 pagesGuía mecanismosWiliam ToapantaNo ratings yet
- Diseño SistematicoDocument15 pagesDiseño SistematicoLuis FloresNo ratings yet
- 1ra Reporte ANalisis de Meca.Document6 pages1ra Reporte ANalisis de Meca.Mimi Flores SalazarNo ratings yet
- Cinemática de MecanismosDocument25 pagesCinemática de MecanismosGabriel CastilloNo ratings yet
- MecanismoDocument4 pagesMecanismodanielNo ratings yet
- Generalidades 2023Document13 pagesGeneralidades 2023Armando EstephanNo ratings yet
- Motor de PistonDocument40 pagesMotor de PistonCintia Sarr100% (1)
- Introducción a los mecanismosDocument18 pagesIntroducción a los mecanismosDanna LopezNo ratings yet
- Aplicaciones de Los MecanismosDocument5 pagesAplicaciones de Los Mecanismosjorge marinNo ratings yet
- MECANISMOSDocument6 pagesMECANISMOSLeonardo Vidal CorralesNo ratings yet
- Análisis de mecanismos en el IPNDocument17 pagesAnálisis de mecanismos en el IPNCarlos JarquínNo ratings yet
- Mecanismos 1Document94 pagesMecanismos 1Benhamin Vaz Zu83% (6)
- Mecanismos TopologiaDocument10 pagesMecanismos TopologiaCésar LaraNo ratings yet
- 6 MecanismoDocument3 pages6 Mecanismosistemas hotel costa del solNo ratings yet
- Análisis y Síntesis de Mecanismos ResumenDocument17 pagesAnálisis y Síntesis de Mecanismos ResumenGAM TZ- Tutos y Covers100% (1)
- Tema 1 Introducción A La Teoría de Mecanismos y MáquinasDocument17 pagesTema 1 Introducción A La Teoría de Mecanismos y Máquinasalbertocc1978No ratings yet
- Componentes máquinasDocument7 pagesComponentes máquinasMiguel100% (1)
- Sistemas Mecánicos - Resumen Completo - SiDocument15 pagesSistemas Mecánicos - Resumen Completo - SiCandela BenitezNo ratings yet
- P 03 Mecanismos Ago19Document55 pagesP 03 Mecanismos Ago19carlos daniel hernandez guzmanNo ratings yet
- InvesmecaDocument14 pagesInvesmecajose jose prieto santanaNo ratings yet
- Actividad 1 Investigacion MecanismosDocument10 pagesActividad 1 Investigacion MecanismosEMILIO MALDONADO DOMINGUEZNo ratings yet
- Introducción Grados de LibertadDocument3 pagesIntroducción Grados de LibertadAnibalHuamanNo ratings yet
- TALLERn2 50608bb4c1ed351Document4 pagesTALLERn2 50608bb4c1ed351Yiovany Campo MeraNo ratings yet
- Clase 1Document26 pagesClase 1Abraham Angelo Cayetano AlvarezNo ratings yet
- Par Cinemático y Grados de LibertadDocument4 pagesPar Cinemático y Grados de Libertadjavier_toca0% (1)
- Lab 3.1Document12 pagesLab 3.1Jared VillarrealNo ratings yet
- Control de MotoresDocument6 pagesControl de MotoresJared VillarrealNo ratings yet
- Lab 3.1Document12 pagesLab 3.1Jared VillarrealNo ratings yet
- Practica 1Document12 pagesPractica 1Jared VillarrealNo ratings yet
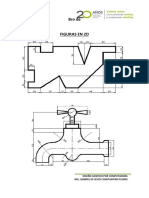
- Figuras en 2d Solid WorksDocument9 pagesFiguras en 2d Solid WorksJared VillarrealNo ratings yet
- Fisica: Actividades Anual Mensual Semanal DiariaDocument1 pageFisica: Actividades Anual Mensual Semanal DiariaJared VillarrealNo ratings yet
- Practica 1Document12 pagesPractica 1Jared VillarrealNo ratings yet
- Practicas MatlabDocument5 pagesPracticas MatlabJared VillarrealNo ratings yet
- Figuras en 2D PDFDocument9 pagesFiguras en 2D PDFJared VillarrealNo ratings yet
- Practica # 3 Sistemas Mecanicos.Document3 pagesPractica # 3 Sistemas Mecanicos.Jared VillarrealNo ratings yet
- Filtros de Segundo OrdenDocument4 pagesFiltros de Segundo OrdenJared VillarrealNo ratings yet
- Plan de Estudios 2011. Educación BásicaDocument93 pagesPlan de Estudios 2011. Educación BásicaRigoberto Vicente Castro100% (15)
- Configurar MoodleDocument92 pagesConfigurar MoodleJared VillarrealNo ratings yet
- Proyecto 2Document39 pagesProyecto 2Javier EscobarNo ratings yet
- 3300 Fabricacion de Aleaciones ComunesDocument124 pages3300 Fabricacion de Aleaciones ComunesMOLD DESIGN SASNo ratings yet
- Tarea 2Document7 pagesTarea 2rebeca100% (1)
- Guias ProgramaDocument49 pagesGuias ProgramaMaría C. Parra M.100% (1)
- Diseño Orientado A Objetos. Diagramas de ClaseDocument18 pagesDiseño Orientado A Objetos. Diagramas de ClaseJohn F MahechaNo ratings yet
- Herramientas eléctricas aisladasDocument52 pagesHerramientas eléctricas aisladasRomel Paniagua OlmedoNo ratings yet
- Sistemas de Produccion en ConfeccionesDocument27 pagesSistemas de Produccion en Confeccionesaustinmonterrey75% (4)
- Desempeño en Seguridad y Salud Ocupacional de QuellavecoDocument8 pagesDesempeño en Seguridad y Salud Ocupacional de QuellavecojohnNo ratings yet
- Motor FireDocument8 pagesMotor FireMarcos Ledesma Uryi33% (3)
- Manual Usuario GesProDocument11 pagesManual Usuario GesProManuelNo ratings yet
- Canales de Distribución CocaColaDocument3 pagesCanales de Distribución CocaColaAdan Nicolas Vasquez SmithNo ratings yet
- 6 El Uso Juego de GeometríaDocument8 pages6 El Uso Juego de GeometríaaidaNo ratings yet
- Armand v. FeigenbaumDocument22 pagesArmand v. Feigenbaumlucho107No ratings yet
- Tipos de RevestimientosDocument4 pagesTipos de RevestimientosFranco Carrasco CollantesNo ratings yet
- Giovanni ZMM Castro ManualDocument117 pagesGiovanni ZMM Castro ManualJOHON HIDALGO0% (1)
- NTC4109 - Resumen PDFDocument12 pagesNTC4109 - Resumen PDFjonathan1124No ratings yet
- Cimentaciones de Una Casa de 1 y Dos PisosDocument22 pagesCimentaciones de Una Casa de 1 y Dos PisosSebastián QuirogaNo ratings yet
- Memoria Descriptiva ALPACAS 2010 LUCHODocument38 pagesMemoria Descriptiva ALPACAS 2010 LUCHORobert Leiva MagallanesNo ratings yet
- Hoja de Operaciones 05Document22 pagesHoja de Operaciones 05VictorTipianiHerreraNo ratings yet
- ENC-GT-FR-041 (01) Lista de Verificación de Camión Grúa y Grúa Con CanastillaDocument1 pageENC-GT-FR-041 (01) Lista de Verificación de Camión Grúa y Grúa Con CanastillaJ NuñezNo ratings yet
- Planteamiento Del ProblemaDocument5 pagesPlanteamiento Del ProblemaAnonymous EMXtlLNo ratings yet
- Cuadro Comparativo "Medios y Modos de Transporte"Document5 pagesCuadro Comparativo "Medios y Modos de Transporte"Jhon Zuñiga0% (1)
- Tipos de TransporteDocument4 pagesTipos de TransporteBRENDA PAOLA SANCHEZ LARANo ratings yet
- Rosca MecanicaDocument6 pagesRosca MecanicaRPBNo ratings yet
- Porta placa de orificio C.RDocument4 pagesPorta placa de orificio C.RJocelinNo ratings yet
- Amaze 1 PDFDocument12 pagesAmaze 1 PDFMaria Angelica Suaza SerranoNo ratings yet
- So To Fernandez GuadalupeDocument211 pagesSo To Fernandez GuadalupeselenaNo ratings yet
- ALMACEN-MATERIALES-CONSTRUCCIÓNDocument21 pagesALMACEN-MATERIALES-CONSTRUCCIÓNKimberli Zuñiga VenturaNo ratings yet
- Cronograma 3° TecnologíaDocument4 pagesCronograma 3° TecnologíaSofía AmiráNo ratings yet
- EGi INSTALACIONESDocument94 pagesEGi INSTALACIONESJuan Pablo RodriguezNo ratings yet