You might also like
- Foro de Mant. Predictivo.Document10 pagesForo de Mant. Predictivo.karlos CieloNo ratings yet
- Practica 12Document8 pagesPractica 12juan eduardoNo ratings yet
- Mantenimiento Predictivo PDFDocument10 pagesMantenimiento Predictivo PDFCharlie IsraelNo ratings yet
- Mantenimiento y Montaje Electromecanico 3Document13 pagesMantenimiento y Montaje Electromecanico 3Dario GonzalezNo ratings yet
- Mantenimiento PredictivoDocument14 pagesMantenimiento PredictivoLUIS ANGEL HERNANDEZ TELUMBRENo ratings yet
- Análisis de Fallas en Motores EléctricosDocument23 pagesAnálisis de Fallas en Motores EléctricosJaviel SánchezNo ratings yet
- Definicion Del Mantenimiento PredictivoDocument8 pagesDefinicion Del Mantenimiento PredictivoJose DelgadoNo ratings yet
- Ra MecanicoDocument28 pagesRa MecanicoEmely ParraNo ratings yet
- Indicadores PredictivosDocument8 pagesIndicadores PredictivosHarold VasquezNo ratings yet
- Guia10 ImformeDocument4 pagesGuia10 ImformeFernando SosaNo ratings yet
- Trabajo Mantenimiento PredictivoDocument13 pagesTrabajo Mantenimiento PredictivoBetto LaRaNo ratings yet
- Mantenimiento PredictivoDocument15 pagesMantenimiento PredictivoLuiis VbNo ratings yet
- Mantenimiento Predictivo Foro ListoDocument3 pagesMantenimiento Predictivo Foro ListoJosue Tito Huanan BenavidesNo ratings yet
- Ensayo Tecnicas de Analisis PredictivoDocument15 pagesEnsayo Tecnicas de Analisis Predictivojezmar lamontNo ratings yet
- TR de MantDocument27 pagesTR de MantAXEL SPROUSENo ratings yet
- Resultado Unidad 3Document17 pagesResultado Unidad 3Emely ParraNo ratings yet
- Mantto Predictivo MonografiasDocument9 pagesMantto Predictivo MonografiasJesús Flores SerratoNo ratings yet
- Proyecto Analisis de Vibraciones LabviewDocument14 pagesProyecto Analisis de Vibraciones LabviewIvan Martinez GNo ratings yet
- Definición Del Mantenimiento PredictivoDocument12 pagesDefinición Del Mantenimiento PredictivowilNo ratings yet
- Mantenimiento Predictivo Por Analisis Vibraciones COMPR Ya!Document10 pagesMantenimiento Predictivo Por Analisis Vibraciones COMPR Ya!ramon.termoNo ratings yet
- Plan de Trabajo Del EstudianteDocument11 pagesPlan de Trabajo Del EstudianteERICK GRANDENo ratings yet
- S03.s1. Tecnicas de Aplicacion Mntto PredictivoDocument10 pagesS03.s1. Tecnicas de Aplicacion Mntto Predictivogabriel chunga yucraNo ratings yet
- Mantenimiento PredictivoDocument11 pagesMantenimiento PredictivoRonald Gutierrez100% (3)
- Fundamentos Del Mantenimiento Predictivo UN.1Document37 pagesFundamentos Del Mantenimiento Predictivo UN.1barbara100% (1)
- A1sl4m13nt0 d3 VibracionesDocument13 pagesA1sl4m13nt0 d3 Vibracionesbrenda mont truNo ratings yet
- Unidad 4 - Analisis de VibracionesDocument18 pagesUnidad 4 - Analisis de VibracionesmiltontmNo ratings yet
- Mantenimiento PreductivoDocument36 pagesMantenimiento PreductivoPhoenixKnightNo ratings yet
- Actividad EntregableDocument13 pagesActividad EntregableJesus Ivan Quispe PaucarNo ratings yet
- Mantenimiento Predictivo y Liquidos PenetrantesDocument24 pagesMantenimiento Predictivo y Liquidos PenetrantesLuis Enrique Avila Michel100% (1)
- 1 - Principios Básicos Del Monitoreo de La Condición rv03Document33 pages1 - Principios Básicos Del Monitoreo de La Condición rv03Gabriel SoteloNo ratings yet
- El Mantenimiento PredictivoDocument10 pagesEl Mantenimiento PredictivoLiz PalaciosNo ratings yet
- Monitoreo de MaquinariaDocument20 pagesMonitoreo de MaquinariaJorge Alexander Prieto PabonNo ratings yet
- Plan de Tesis - Implementacion Del Mantenimiento Preventivo Basado en El Análisis de Vibraciones en El Motor de 401 HPDocument25 pagesPlan de Tesis - Implementacion Del Mantenimiento Preventivo Basado en El Análisis de Vibraciones en El Motor de 401 HPFrank GalvanNo ratings yet
- Vibrotech PDFDocument5 pagesVibrotech PDFwsurferwNo ratings yet
- Material de Estudio Mantenimiento IndustrialDocument30 pagesMaterial de Estudio Mantenimiento IndustrialNelson GonzalezNo ratings yet
- Ensayo de Análisis de Vibraciones Enfocado Al MantenimientoDocument5 pagesEnsayo de Análisis de Vibraciones Enfocado Al MantenimientoQuique RGNo ratings yet
- Mantenimiento Predictivo BuenoDocument4 pagesMantenimiento Predictivo BuenotorresNo ratings yet
- Actividad Tres GerardoDocument9 pagesActividad Tres GerardoLINDA CANTILLONo ratings yet
- Desarrollo Rubrica 12 CorregidoDocument12 pagesDesarrollo Rubrica 12 CorregidoDusyan Jairo HCNo ratings yet
- Proyecto de InvestigacionDocument8 pagesProyecto de InvestigacionJoel PeralTaNo ratings yet
- PredictivoDocument27 pagesPredictivoRofer AldanaNo ratings yet
- Modulo Análisis de VibracionesDocument157 pagesModulo Análisis de VibracionesFrancisco CastroNo ratings yet
- Unidad 4 Monitoreo de Maquina y EquipoDocument11 pagesUnidad 4 Monitoreo de Maquina y EquipojesusrfNo ratings yet
- Mantenimiento PredictivoDocument46 pagesMantenimiento PredictivoAndrea Gil Apaza100% (1)
- Unidad 4Document11 pagesUnidad 4Edward ElricNo ratings yet
- Plan MantenimientoDocument26 pagesPlan MantenimientoFalcao Bautista Zela100% (1)
- Tecnicas Mantenimiento Predictivo de ACIEMDocument11 pagesTecnicas Mantenimiento Predictivo de ACIEMHans CohnNo ratings yet
- (Trabajofinal) Mantenimiento Predictivo - Analisis de Vibraciones (Con Anexos)Document38 pages(Trabajofinal) Mantenimiento Predictivo - Analisis de Vibraciones (Con Anexos)Reginaldo Rafael Alvarez CastilloNo ratings yet
- Predictivo Bombas CentrifugasDocument11 pagesPredictivo Bombas CentrifugasJairo Alberto Vivas Garcia100% (1)
- Mantenimiento Basado en Confiabilidad RCM para Una Fabrica de JabónDocument17 pagesMantenimiento Basado en Confiabilidad RCM para Una Fabrica de JabónYohan Andrés Pineda MartinezNo ratings yet
- Exposición Análisis de VibracionesDocument9 pagesExposición Análisis de Vibracioneskevin acuñaNo ratings yet
- Analisis de Vibraciones en Equipos Roto-DinamicosDocument20 pagesAnalisis de Vibraciones en Equipos Roto-DinamicosMaltz Monster Albert100% (1)
- 1 Las Vibraciones Mecánicas y Su Aplicación Al Mantenimiento PredictivoDocument8 pages1 Las Vibraciones Mecánicas y Su Aplicación Al Mantenimiento PredictivoCarla Dayana Miranda RiveroNo ratings yet
- ForoDocument6 pagesForoLuis EnriqueNo ratings yet
- Mantenimiento Basado en Condición (CBM)Document25 pagesMantenimiento Basado en Condición (CBM)lisbeth0% (1)
- UF2244 - Mantenimiento correctivo de electrodomésticos de gama industrialFrom EverandUF2244 - Mantenimiento correctivo de electrodomésticos de gama industrialRating: 1 out of 5 stars1/5 (1)
- Diagnosis de averías y mantenimiento correctivo de sistemas de automatización industrial. ELEM0311From EverandDiagnosis de averías y mantenimiento correctivo de sistemas de automatización industrial. ELEM0311Rating: 5 out of 5 stars5/5 (1)
- UF1444 - Organización de las intervenciones necesarias para el mantenimiento de las instalaciones eléctricas en el entorno de edificiosFrom EverandUF1444 - Organización de las intervenciones necesarias para el mantenimiento de las instalaciones eléctricas en el entorno de edificiosNo ratings yet
- Mantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409From EverandMantenimiento de sistemas auxiliares del motor de ciclo Otto. TMVG0409No ratings yet
- J NSR 10 PDFDocument125 pagesJ NSR 10 PDFOctavio Andres SandovalNo ratings yet
- Autocad 2D 2019Document4 pagesAutocad 2D 2019GROUP GUEVARA0% (2)
- Base de Datos 2 Trabajo InvestigacionDocument9 pagesBase de Datos 2 Trabajo InvestigacionSteven PintadoNo ratings yet
- Taller 2 - Estadistica (1) 5Document4 pagesTaller 2 - Estadistica (1) 5Mayolly Tocora vargasNo ratings yet
- Reveladora AutomáticaDocument9 pagesReveladora AutomáticaALE X RAY20% (5)
- Operaciones Unitarias. Equipos de Medicion AuxiliaresDocument23 pagesOperaciones Unitarias. Equipos de Medicion AuxiliaresAgustin Franco100% (3)
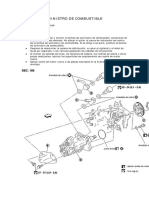
- Nissan Bomba de Suministro de CombustibleDocument25 pagesNissan Bomba de Suministro de CombustibleIsrael TomalaNo ratings yet
- Practica 3 Lab FisicaDocument5 pagesPractica 3 Lab FisicaLFNo ratings yet
- Sopa de LetrasDocument1 pageSopa de LetrasNICOL TELLEZNo ratings yet
- Introduccion A La ElectroterapiaDocument4 pagesIntroduccion A La ElectroterapiaJhenyNo ratings yet
- Convergencia de SeriesDocument15 pagesConvergencia de SeriesManuel ZuñiigaNo ratings yet
- Instrucciones de Programacion BS V9Document522 pagesInstrucciones de Programacion BS V9Andres CastilloNo ratings yet
- Curvimetro y PlanimetroDocument10 pagesCurvimetro y PlanimetroAngel Julisses Valderrama Reyes100% (1)
- Equipo 1 Electromagnetismo 24-1 A 24-5Document5 pagesEquipo 1 Electromagnetismo 24-1 A 24-5Areli Ramirez100% (1)
- Cargas ElectricasDocument3 pagesCargas ElectricasAlex SolisNo ratings yet
- 05sistema de Conversion de Unidades - SolucionarioDocument2 pages05sistema de Conversion de Unidades - SolucionarioCHRISTOFER CARDENAS SERRANO100% (1)
- Mecanica de SuelosDocument9 pagesMecanica de SuelosJohn SabandoNo ratings yet
- Factorizacion R1Document2 pagesFactorizacion R1JHON GUSTAVO COSI RAFAELNo ratings yet
- Movimiento OndulatorioDocument4 pagesMovimiento OndulatorioDANIEL ALEXANDER CASTRO BALLESTASNo ratings yet
- Las Bombillas y Su Impacto en El MedioDocument8 pagesLas Bombillas y Su Impacto en El MediodannNo ratings yet
- Laboratorio Flujo Laminar y TurbulentoDocument9 pagesLaboratorio Flujo Laminar y TurbulentoDilan GomezNo ratings yet
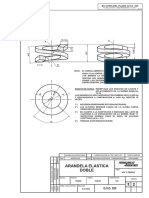
- GVO - 525 Arandela Doble ElasticaDocument1 pageGVO - 525 Arandela Doble ElasticaLeonel BerlinNo ratings yet
- WordDocument6 pagesWordAurimar SalasNo ratings yet
- Ejercicio s05 - Velocidad Real de Flujo - 2021 - II - Barrios Rosas JamerDocument6 pagesEjercicio s05 - Velocidad Real de Flujo - 2021 - II - Barrios Rosas JamerBarrios Rosas JamerNo ratings yet
- Elaborar El Manjar Blanco Del ValleDocument29 pagesElaborar El Manjar Blanco Del ValleLoscar Carlos LoaizaNo ratings yet
- Ejercicios UT2 - Primera ParteDocument2 pagesEjercicios UT2 - Primera ParteMarcos Martínez CánovasNo ratings yet
- Cultura TributariaDocument26 pagesCultura TributariaDavid Omar FernandezNo ratings yet
- Problemas ResueltosDocument15 pagesProblemas ResueltosYordan ChavezNo ratings yet
- Anti Derivada o PrimitivaDocument18 pagesAnti Derivada o PrimitivaTabata VegasNo ratings yet
- Parametros de Corte PlasmaDocument4 pagesParametros de Corte PlasmaDJ-Charlie BrownNo ratings yet