You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Ein Extensive ListDocument60 pagesEin Extensive ListRoberto Monterrosa100% (2)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- PLLV Client Consent FormDocument4 pagesPLLV Client Consent Formapi-237715517No ratings yet
- How To Guide To Oauth and API SecurityDocument12 pagesHow To Guide To Oauth and API Securitysilviuleahu100% (1)
- Indian Ordnance FactoryDocument2 pagesIndian Ordnance FactoryAniket ChakiNo ratings yet
- 3-Matic 14 - User Manual 15Document169 pages3-Matic 14 - User Manual 15Oliver RuizNo ratings yet
- Event MCQDocument9 pagesEvent MCQpralay ganguly50% (2)
- Characteristics of The Non-Sinusoidal Coefficient of The Voltage at Node Containing A Thyristor Compensator in Presence of HarmonicsDocument4 pagesCharacteristics of The Non-Sinusoidal Coefficient of The Voltage at Node Containing A Thyristor Compensator in Presence of HarmonicsZellagui EnergyNo ratings yet
- Condition Assesment 2015 D10 2 LIFE CYCLE ASSESSMENT MEDIUM VOLTAGE FOR FRENCH MARKET PDFDocument5 pagesCondition Assesment 2015 D10 2 LIFE CYCLE ASSESSMENT MEDIUM VOLTAGE FOR FRENCH MARKET PDFZellagui EnergyNo ratings yet
- A Carrier-Based PWM Techniques Applied To A Three-Level Four-Leg Inverter For Use As A Shunt Active Power FilterDocument6 pagesA Carrier-Based PWM Techniques Applied To A Three-Level Four-Leg Inverter For Use As A Shunt Active Power FilterZellagui EnergyNo ratings yet
- Observer-Based Adaptive Fuzzy Control For SISO Nonlinear Systems Via BacksteppingDocument5 pagesObserver-Based Adaptive Fuzzy Control For SISO Nonlinear Systems Via BacksteppingZellagui EnergyNo ratings yet
- Optimal Overcurrent Relay Coordination Using Artificial Bees Colony AlgorithmDocument4 pagesOptimal Overcurrent Relay Coordination Using Artificial Bees Colony AlgorithmZellagui EnergyNo ratings yet
- Optimum Coordination of Directional Overcurrent Relays Using The Hybrid GA-NLP ApproachDocument11 pagesOptimum Coordination of Directional Overcurrent Relays Using The Hybrid GA-NLP ApproachZellagui EnergyNo ratings yet
- Lecture - Distribution Protection Overview (P. 1)Document60 pagesLecture - Distribution Protection Overview (P. 1)Zellagui EnergyNo ratings yet
- Paper ID198 PDFDocument6 pagesPaper ID198 PDFZellagui EnergyNo ratings yet
- Synthesis of Diplophonic and Biphonic Voices: Y. Bennane, A. Kacha F. GrenezDocument5 pagesSynthesis of Diplophonic and Biphonic Voices: Y. Bennane, A. Kacha F. GrenezZellagui EnergyNo ratings yet
- % BC - D% DH - C HCGD : % - U%so Wjo %V S%TJJV %o J MQ o Jtjuv R%Q U%v Jotr%s - % - NRV % %Document4 pages% BC - D% DH - C HCGD : % - U%so Wjo %V S%TJJV %o J MQ o Jtjuv R%Q U%v Jotr%s - % - NRV % %Zellagui EnergyNo ratings yet
- Analysis of CFAR Detection With Multiple Pulses Transmission Case in Pareto Distributed ClutterDocument6 pagesAnalysis of CFAR Detection With Multiple Pulses Transmission Case in Pareto Distributed ClutterZellagui EnergyNo ratings yet
- Section 12-22, Art. 3, 1987 Philippine ConstitutionDocument3 pagesSection 12-22, Art. 3, 1987 Philippine ConstitutionKaren LabogNo ratings yet
- On Fracture MechanicsDocument81 pagesOn Fracture MechanicsDEEPAK100% (1)
- Polyhouse Gerbera CultivationDocument5 pagesPolyhouse Gerbera CultivationArvindVPawar100% (2)
- Odontogenic CystsDocument5 pagesOdontogenic CystsBH ASMRNo ratings yet
- Retail Marketing Course Work 11Document5 pagesRetail Marketing Course Work 11Ceacer Julio SsekatawaNo ratings yet
- Good Practice On The Project "Improve The Food Security of Farming Families Affected by Volatile Food Prices" (Nutrition Component) in CambodiaDocument2 pagesGood Practice On The Project "Improve The Food Security of Farming Families Affected by Volatile Food Prices" (Nutrition Component) in CambodiaADBGADNo ratings yet
- Telemeter-Electronic Brochure Flexible Heaters WebDocument12 pagesTelemeter-Electronic Brochure Flexible Heaters WebXavierNo ratings yet
- 2008 Reverse Logistics Strategies For End-Of-life ProductsDocument22 pages2008 Reverse Logistics Strategies For End-Of-life ProductsValen Ramirez HNo ratings yet
- Invidis Yearbook 2019Document51 pagesInvidis Yearbook 2019Luis SanchezNo ratings yet
- MTBE - Module - 3Document83 pagesMTBE - Module - 3ABHIJITH V SNo ratings yet
- Media ReportDocument46 pagesMedia ReportAndrew AB BurgoonNo ratings yet
- Profile Romblon IslandDocument10 pagesProfile Romblon Islandderella starsNo ratings yet
- 1 General: Fig. 1.1 Industrial RobotDocument40 pages1 General: Fig. 1.1 Industrial RobotArunNo ratings yet
- Projek Rekabentuk Walkwaybridge 2014 - 15Document6 pagesProjek Rekabentuk Walkwaybridge 2014 - 15HambaliNo ratings yet
- K8+ Single Chip Keyer Manual: 3 To 5 VDCDocument8 pagesK8+ Single Chip Keyer Manual: 3 To 5 VDCtito351No ratings yet
- National Geographic - April 2020 PDFDocument160 pagesNational Geographic - April 2020 PDFIbn ZubairNo ratings yet
- Invoice 1281595768Document3 pagesInvoice 1281595768vikas9849No ratings yet
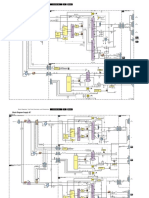
- Philips Chassis Lc4.31e Aa Power Dps 181 PDFDocument9 pagesPhilips Chassis Lc4.31e Aa Power Dps 181 PDFAouadi AbdellazizNo ratings yet
- Managerial Economics - 1Document36 pagesManagerial Economics - 1Deepi SinghNo ratings yet
- Analytical Profiles Drug Substances and Excipien T S: Harry G. BrittainDocument693 pagesAnalytical Profiles Drug Substances and Excipien T S: Harry G. BrittainNguyen TriNo ratings yet
- 1 Introduction To Pharmaceutical Dosage Forms Part1Document32 pages1 Introduction To Pharmaceutical Dosage Forms Part1Joanna Carla Marmonejo Estorninos-Walker100% (1)
- Analisis Dan Perbandingan Jaringan Wifi Dengan Frekuensi 2.4 GHZ Dan 5 GHZ Dengan Metode QosDocument19 pagesAnalisis Dan Perbandingan Jaringan Wifi Dengan Frekuensi 2.4 GHZ Dan 5 GHZ Dengan Metode QosNoltujuh Nollapan (Congyang)No ratings yet
- Lucero Flores Resume 2Document2 pagesLucero Flores Resume 2api-260292914No ratings yet
- Understanding FreeRTOS SVCDocument11 pagesUnderstanding FreeRTOS SVCshafi hasmani0% (1)