You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A-Z Survival Items Post SHTFDocument28 pagesA-Z Survival Items Post SHTFekott100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Pinterest or Thinterest Social Comparison and Body Image On Social MediaDocument9 pagesPinterest or Thinterest Social Comparison and Body Image On Social MediaAgung IkhssaniNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Design of RC Beams With OpeningsDocument8 pagesDesign of RC Beams With OpeningsVatsal GokaniNo ratings yet
- MAMansur 2006 Design of Reinforced Concrete Beams With Web Openings PDFDocument17 pagesMAMansur 2006 Design of Reinforced Concrete Beams With Web Openings PDFvinthfNo ratings yet
- Effects of Opening On The Behavior of Reinforced Concrete Beam I011275261Document10 pagesEffects of Opening On The Behavior of Reinforced Concrete Beam I01127526101010No ratings yet
- Effects of Opening On The Behavior of Reinforced Concrete Beam I011275261Document10 pagesEffects of Opening On The Behavior of Reinforced Concrete Beam I01127526101010No ratings yet
- ACTIVITY Design - Nutrition MonthDocument7 pagesACTIVITY Design - Nutrition MonthMaria Danica89% (9)
- Piston Master PumpsDocument14 pagesPiston Master PumpsMauricio Ariel H. OrellanaNo ratings yet
- Technical Data - Tad1342veDocument9 pagesTechnical Data - Tad1342veRachid SmailiNo ratings yet
- Fractional Differential Equations: Bangti JinDocument377 pagesFractional Differential Equations: Bangti JinOmar GuzmanNo ratings yet
- Life Assessment of High Temperature HeadersDocument31 pagesLife Assessment of High Temperature HeadersAnonymous UoHUag100% (1)
- Design of Beams With HolesDocument7 pagesDesign of Beams With Holes01010No ratings yet
- The Innovator - S SolutionDocument21 pagesThe Innovator - S SolutionKeijjo Matti100% (1)
- Flexural Behavior of Cantilever Concrete BeamsDocument12 pagesFlexural Behavior of Cantilever Concrete Beams01010No ratings yet
- Flexure Strength of Reinforced Concrete Beams PDFDocument5 pagesFlexure Strength of Reinforced Concrete Beams PDF01010No ratings yet
- A Techno-Economic Rating System For Highways UsingDocument5 pagesA Techno-Economic Rating System For Highways Using01010No ratings yet
- Behavior of Reinforced Concrete BeamsStrengthened With Carbon Fiber Strips - Sept2004 - Civ2Document19 pagesBehavior of Reinforced Concrete BeamsStrengthened With Carbon Fiber Strips - Sept2004 - Civ201010No ratings yet
- 157Document23 pages15701010No ratings yet
- Al Amery2006Document8 pagesAl Amery200601010No ratings yet
- Shear and Flexural Behaviour of R.C.C. Beam With Circular Opening Strengthened by CFRP SheetsO50402101104Document4 pagesShear and Flexural Behaviour of R.C.C. Beam With Circular Opening Strengthened by CFRP SheetsO5040210110401010No ratings yet
- Concrete Design TheoryDocument26 pagesConcrete Design Theoryyyanan1118No ratings yet
- Theoretical Crack Angle in Reinforced Concrete Elements Subjected To Strong EarthquakesDocument8 pagesTheoretical Crack Angle in Reinforced Concrete Elements Subjected To Strong Earthquakes01010No ratings yet
- Theoretical Crack Angle in Reinforced Concrete Elements Subjected To Strong EarthquakesDocument8 pagesTheoretical Crack Angle in Reinforced Concrete Elements Subjected To Strong Earthquakes01010No ratings yet
- Deformation Capacity of The Concrete Compression Zone - Stress-Strain Curves For Nonlinear CalculationDocument16 pagesDeformation Capacity of The Concrete Compression Zone - Stress-Strain Curves For Nonlinear Calculation01010No ratings yet
- Ok-29595 - Effect of Sizes and Positions of Web Openings On Strut-and-Tie Models of Deep Beams PDFDocument37 pagesOk-29595 - Effect of Sizes and Positions of Web Openings On Strut-and-Tie Models of Deep Beams PDF01010No ratings yet
- Strengthening of Continuous SCC Hollow Beams Under Shear Stresses Using Warped CFRP StripsDocument12 pagesStrengthening of Continuous SCC Hollow Beams Under Shear Stresses Using Warped CFRP Strips01010No ratings yet
- Behaviorofr 140808015317 Phpapp01 PDFDocument5 pagesBehaviorofr 140808015317 Phpapp01 PDF01010No ratings yet
- Experimental and Numerical Study of The Effects of Creating Openings in Existing RC Beams and Strengthening With CFRPDocument12 pagesExperimental and Numerical Study of The Effects of Creating Openings in Existing RC Beams and Strengthening With CFRP01010No ratings yet
- Reinforcement Detailing For Openings in Beams 103Document5 pagesReinforcement Detailing For Openings in Beams 103stefengoNo ratings yet
- Nonlinear Analysis For Behavior of Hollow Box Reinforced Concrete Arch Beams With Transverse OpeningsDocument9 pagesNonlinear Analysis For Behavior of Hollow Box Reinforced Concrete Arch Beams With Transverse Openings01010No ratings yet
- Effect of Small Circular Opening On The Shear and Flextural Behavior and Ultimate Strength of Reinforced Concrete Beams Using Normal and High Strength ConcreteDocument14 pagesEffect of Small Circular Opening On The Shear and Flextural Behavior and Ultimate Strength of Reinforced Concrete Beams Using Normal and High Strength ConcreteSandeep ShridharNo ratings yet
- Behavior of R.C.C. Beam With Circular Opening Strengthened by CFRP and GFRP Sheets, 2013, Mithun Kumar, IndiaDocument5 pagesBehavior of R.C.C. Beam With Circular Opening Strengthened by CFRP and GFRP Sheets, 2013, Mithun Kumar, India01010No ratings yet
- Chapter Two: Literature ReviewDocument22 pagesChapter Two: Literature Review01010No ratings yet
- Shear and Flexural Behaviour of R.C.C. Beam With Circular Opening Strengthened by CFRP SheetsO50402101104Document4 pagesShear and Flexural Behaviour of R.C.C. Beam With Circular Opening Strengthened by CFRP SheetsO5040210110401010No ratings yet
- Nonlinear Analysis For Behavior of Hollow Box Reinforced Concrete Arch Beams With Transverse OpeningsDocument9 pagesNonlinear Analysis For Behavior of Hollow Box Reinforced Concrete Arch Beams With Transverse Openings01010No ratings yet
- A Review of Design Specifications of Opening in The Web For Simply Supported RC Beamsopenings - in - Web - of - RC - Beams - Amiri - Et - Al - 2011 - 156Document22 pagesA Review of Design Specifications of Opening in The Web For Simply Supported RC Beamsopenings - in - Web - of - RC - Beams - Amiri - Et - Al - 2011 - 15601010No ratings yet
- EffectivenessDocument13 pagesEffectivenessPhillip MendozaNo ratings yet
- Deictics and Stylistic Function in J.P. Clark-Bekederemo's PoetryDocument11 pagesDeictics and Stylistic Function in J.P. Clark-Bekederemo's Poetryym_hNo ratings yet
- Description About Moon: Earth SatelliteDocument6 pagesDescription About Moon: Earth SatellitePurva KhatriNo ratings yet
- Nodal Analysis Collection 2Document21 pagesNodal Analysis Collection 2Manoj ManmathanNo ratings yet
- Facts About The TudorsDocument3 pagesFacts About The TudorsRaluca MuresanNo ratings yet
- Term Paper A and CDocument9 pagesTerm Paper A and CKishaloy NathNo ratings yet
- Unit 2 Module 2 Combined-1Document14 pagesUnit 2 Module 2 Combined-1api-2930012170% (2)
- Unit 7 - Evolution and Classification: Regents BiologyDocument24 pagesUnit 7 - Evolution and Classification: Regents BiologyTalijah JamesNo ratings yet
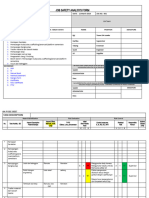
- JSA FormDocument4 pagesJSA Formfinjho839No ratings yet
- Advantages of The CapmDocument3 pagesAdvantages of The Capmdeeparaghu6No ratings yet
- Promoting Services and Educating CustomersDocument28 pagesPromoting Services and Educating Customershassan mehmoodNo ratings yet
- Ramo's TheoremDocument4 pagesRamo's TheoremlucasNo ratings yet
- Đề Anh DHBB K10 (15-16) CBNDocument17 pagesĐề Anh DHBB K10 (15-16) CBNThân Hoàng Minh0% (1)
- Communication MethodDocument30 pagesCommunication MethodMisganaw GishenNo ratings yet
- Venere Jeanne Kaufman: July 6 1947 November 5 2011Document7 pagesVenere Jeanne Kaufman: July 6 1947 November 5 2011eastendedgeNo ratings yet
- Embedded System Lab ManualDocument67 pagesEmbedded System Lab Manualsaim100% (1)
- Vicente BSC2-4 WhoamiDocument3 pagesVicente BSC2-4 WhoamiVethinaVirayNo ratings yet
- Alan Freeman - Ernest - Mandels - Contribution - To - Economic PDFDocument34 pagesAlan Freeman - Ernest - Mandels - Contribution - To - Economic PDFhajimenozakiNo ratings yet
- DOMESDocument23 pagesDOMESMukthesh ErukullaNo ratings yet
- Dr. Babasaheb Ambedkar Technological UniversityDocument3 pagesDr. Babasaheb Ambedkar Technological UniversityalfajNo ratings yet
- Boeing SWOT AnalysisDocument3 pagesBoeing SWOT AnalysisAlexandra ApostolNo ratings yet
- Enzymatic Hydrolysis, Analysis of Mucic Acid Crystals and Osazones, and Thin - Layer Chromatography of Carbohydrates From CassavaDocument8 pagesEnzymatic Hydrolysis, Analysis of Mucic Acid Crystals and Osazones, and Thin - Layer Chromatography of Carbohydrates From CassavaKimberly Mae MesinaNo ratings yet