You might also like
- Adc F08Document57 pagesAdc F08Bhupati MakupallyNo ratings yet
- Adc F08Document57 pagesAdc F08Bhupati MakupallyNo ratings yet
- Power Flow Studies-Chapter 5aaaDocument74 pagesPower Flow Studies-Chapter 5aaadautroc13No ratings yet
- AN ABCs of ADCDocument64 pagesAN ABCs of ADCkiran445No ratings yet
- DAC (Digital-To-Analog Conversion and ADC (Analog-To-Digital Conversion)Document26 pagesDAC (Digital-To-Analog Conversion and ADC (Analog-To-Digital Conversion)NadeemShaikNo ratings yet
- Refinements of The Ziegler Nichols Tuning Formula C.C PDFDocument8 pagesRefinements of The Ziegler Nichols Tuning Formula C.C PDFdautroc13No ratings yet
- Ps1 MATLAB Solutions f12Document5 pagesPs1 MATLAB Solutions f12dautroc13No ratings yet
- Phan 1 On TapDocument1 pagePhan 1 On Tapdautroc13No ratings yet
- AaPower System AnalysisDocument79 pagesAaPower System AnalysisFlash LightNo ratings yet
- Electrical MachinesDocument1 pageElectrical MachinesShatruddha Singh KushwahaNo ratings yet
- 2batap hh10Document1 page2batap hh10dautroc13No ratings yet
- AC Motors Winding DiagramDocument40 pagesAC Motors Winding Diagrampepa6781% (31)
- 1batap hh10Document1 page1batap hh10dautroc13No ratings yet
- MITRES 6 007S11 hw09 SolDocument15 pagesMITRES 6 007S11 hw09 SolnicolasamoreiraNo ratings yet
- A Comparison of Multicarrier PWM Strategies For Cascaded and Neutral Point Clamped Multilevel InvertersDocument6 pagesA Comparison of Multicarrier PWM Strategies For Cascaded and Neutral Point Clamped Multilevel InvertersKanna Thanga RajNo ratings yet
- 9a AC Induction Motors Rev 3 100114 CCuploadDocument16 pages9a AC Induction Motors Rev 3 100114 CCuploaddautroc13No ratings yet
- Logarithmic Fourier Transformation: G. V. Haines and Alan G. JonesDocument8 pagesLogarithmic Fourier Transformation: G. V. Haines and Alan G. Jonesdautroc13No ratings yet
- Ee394v DG Week6Document12 pagesEe394v DG Week6dautroc13No ratings yet
- Oemax Nx70 Um002a en PDocument86 pagesOemax Nx70 Um002a en Pdautroc13No ratings yet
- Fourier AnalysisDocument61 pagesFourier AnalysisPedro LopezNo ratings yet
- Z-Transform Example #3Document2 pagesZ-Transform Example #3dautroc13No ratings yet
- 9bus System, Power FlowDocument17 pages9bus System, Power FlowZeeshan AhmedNo ratings yet
- PP NRDocument4 pagesPP NRAnh Tuan PhanNo ratings yet
- AaPower System AnalysisDocument79 pagesAaPower System AnalysisFlash LightNo ratings yet
- Flash 1Document94 pagesFlash 1dautroc13No ratings yet
- Ly Thuyet Mach - Tap 2Document231 pagesLy Thuyet Mach - Tap 2dautroc13No ratings yet
- 4530 enDocument2 pages4530 endautroc13No ratings yet
- Thermocouple Sand Resistance ThermometersDocument44 pagesThermocouple Sand Resistance Thermometersdautroc13No ratings yet
- 1132 Khao Sat Ung Dung Matlab Trong DKTDDocument265 pages1132 Khao Sat Ung Dung Matlab Trong DKTDTrần Trung HiếuNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- HVAC BrochureDocument18 pagesHVAC BrochureCarlos Benavides AlvarezNo ratings yet
- 121 Handout 1Document8 pages121 Handout 1abby wamikeNo ratings yet
- Protection Instrument TransformersDocument21 pagesProtection Instrument TransformersSyed Muzammil AliNo ratings yet
- Swing Door Installation ManualDocument28 pagesSwing Door Installation Manualmararuly biliyantoNo ratings yet
- Vector Battery ChargerDocument8 pagesVector Battery ChargervovobossNo ratings yet
- Ts 590sg Idm OkDocument76 pagesTs 590sg Idm OkLoco Soy Loco SoyNo ratings yet
- Class 1Document126 pagesClass 1madhu eceNo ratings yet
- Danfoss VLT Aqua Drive Fc202Document98 pagesDanfoss VLT Aqua Drive Fc202api-3696336No ratings yet
- 04-Electrical Equipment ModuleDocument3 pages04-Electrical Equipment ModuleSayed AbbasNo ratings yet
- Cancel Fals Distr AlertDocument1 pageCancel Fals Distr AlertIGORNo ratings yet
- Marine GroundingDocument9 pagesMarine GroundingTara CollierNo ratings yet
- NHD C12864LZ FSW FBW 3V3Document13 pagesNHD C12864LZ FSW FBW 3V3SrishtiNo ratings yet
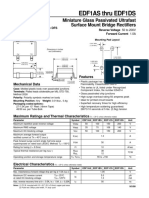
- EDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersDocument2 pagesEDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersCarlosNo ratings yet
- High Speed Centrifuge, 1248R - Service ManualDocument40 pagesHigh Speed Centrifuge, 1248R - Service ManualTalhaNo ratings yet
- Antennas: Constantine A. BalanisDocument45 pagesAntennas: Constantine A. BalanisAzeem BhattiNo ratings yet
- Very Short Answer Questions RAY OPTICS (2 Marks)Document6 pagesVery Short Answer Questions RAY OPTICS (2 Marks)SandilyaNo ratings yet
- HPE ProLiant DL360 Gen11 QuickspecsDocument103 pagesHPE ProLiant DL360 Gen11 QuickspecsJules ExNo ratings yet
- Ti21 TC NotesDocument157 pagesTi21 TC NotesVikas JainNo ratings yet
- FORTRAN Based ApproachDocument22 pagesFORTRAN Based ApproachGS EKTANo ratings yet
- Control A Cordless Drill Motor Using Zilog Encore F0830 PDFDocument17 pagesControl A Cordless Drill Motor Using Zilog Encore F0830 PDFAlberto SequeiraNo ratings yet
- M7A39v1.4 B350M GAMING PRO Placa Baza PC IonutDocument21 pagesM7A39v1.4 B350M GAMING PRO Placa Baza PC IonutdjbobyNo ratings yet
- VIP396 ManualDocument8 pagesVIP396 ManualWONG HOW YANNo ratings yet
- Tek Probe TutorialDocument13 pagesTek Probe Tutorialjvs57No ratings yet
- Free Space Radar: Product Selection Guide - Installation and ApplicationDocument2 pagesFree Space Radar: Product Selection Guide - Installation and ApplicationGabriela JimenezNo ratings yet
- Ibwave V 6.5.3Document38 pagesIbwave V 6.5.3Idoga Meshach Ameh100% (1)
- CSS - Proper Use and Maintenance of ToolsDocument1 pageCSS - Proper Use and Maintenance of ToolsRowell Marquina100% (1)
- Virtual Feeder Segregation Using IIoT and Cloud TechnologiesDocument7 pagesVirtual Feeder Segregation Using IIoT and Cloud Technologiespjgandhi100% (2)
- Wollo UniversityDocument13 pagesWollo UniversitySISAy AyalewNo ratings yet
- Auto1232 - 1238-532 - E - Controller - Revised 4 - 28 - 21Document66 pagesAuto1232 - 1238-532 - E - Controller - Revised 4 - 28 - 21Edgar MartínNo ratings yet
- ME1117 (Pb-Free) : 1A Low Dropout Voltage RegulatorDocument9 pagesME1117 (Pb-Free) : 1A Low Dropout Voltage RegulatorGeovanny SanJuanNo ratings yet