You might also like
- Maths Methods Week 1: Vector SpacesDocument100 pagesMaths Methods Week 1: Vector SpacesRoy VeseyNo ratings yet
- Solutions To Appendix A ExercisesDocument58 pagesSolutions To Appendix A ExercisesPabloPalaciosAvilaNo ratings yet
- Quantum PhysicsDocument50 pagesQuantum PhysicsSahil ChadhaNo ratings yet
- Some Mathematical Preliminaries Linear Vector SpacesDocument9 pagesSome Mathematical Preliminaries Linear Vector SpacesjasmonNo ratings yet
- LA Notes CompleteDocument36 pagesLA Notes CompleteShiyeng CharmaineNo ratings yet
- 2 StatesDocument10 pages2 StatesVinayak DuttaNo ratings yet
- Lecture 1: September 28, 2021: Mathematical Toolkit Autumn 2021Document5 pagesLecture 1: September 28, 2021: Mathematical Toolkit Autumn 2021Pushkaraj PanseNo ratings yet
- Lecture 1 - NewDocument8 pagesLecture 1 - NewFares FathyNo ratings yet
- Lecture 2: Linear Operators: IIT KanpurDocument13 pagesLecture 2: Linear Operators: IIT KanpurpratapsahooNo ratings yet
- 4 Pictures of The Same Thing: Picture (I) : Systems of Linear EquationsDocument4 pages4 Pictures of The Same Thing: Picture (I) : Systems of Linear EquationsthezackattackNo ratings yet
- 4-General Vector SpacesDocument35 pages4-General Vector SpacesslowjamsNo ratings yet
- Anin Mimos MathDocument24 pagesAnin Mimos MathAtul NipaneNo ratings yet
- 4 Mathematical Preliminaries: 4.1 Linear Vector SpaceDocument23 pages4 Mathematical Preliminaries: 4.1 Linear Vector SpaceSURESH SURAGANINo ratings yet
- Vector Space PresentationDocument26 pagesVector Space Presentationmohibrajput230% (1)
- Multilinear Algebra - MITDocument141 pagesMultilinear Algebra - MITasdNo ratings yet
- QM 1Document24 pagesQM 1Salim DávilaNo ratings yet
- Summary (Linear Algebra)Document3 pagesSummary (Linear Algebra)Kun Zhou0% (1)
- Vector SpacesDocument16 pagesVector SpacesRaulNo ratings yet
- Introduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriDocument26 pagesIntroduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriAshmilNo ratings yet
- Lecture13 AuroraDocument9 pagesLecture13 Auroramartin701107No ratings yet
- Vector and Matrix NormDocument17 pagesVector and Matrix NormpaivensolidsnakeNo ratings yet
- Block 1Document18 pagesBlock 1muay88No ratings yet
- Balki QM Problem Set PDFDocument50 pagesBalki QM Problem Set PDFaakaash00710No ratings yet
- Introduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriDocument33 pagesIntroduction To Continuum Mechanics Lecture Notes: Jagan M. Padbidrivishnu rajuNo ratings yet
- Linear Algebra - Friedberg - 4th Ed - Some NotionsDocument16 pagesLinear Algebra - Friedberg - 4th Ed - Some NotionsKatrienKlaassen0% (1)
- Cambridge Part IB Linear Algebra Alex ChanDocument82 pagesCambridge Part IB Linear Algebra Alex ChanChung Chee YuenNo ratings yet
- Iiserb Mm1 Notes Oct 4Document30 pagesIiserb Mm1 Notes Oct 4Shruti ShirolNo ratings yet
- Matrices & Linear Algebra: Vector SpacesDocument20 pagesMatrices & Linear Algebra: Vector SpacesFelipe López GarduzaNo ratings yet
- 221 HomeworkDocument45 pages221 Homeworkkevincshih100% (1)
- 3 - Vector SpacesDocument143 pages3 - Vector SpacesnhưNo ratings yet
- Appendix A: A.1 Gratuitous Mathematics: Definitions of Vector SpacesDocument12 pagesAppendix A: A.1 Gratuitous Mathematics: Definitions of Vector SpacesnefizeNo ratings yet
- MIT NoteDocument140 pagesMIT NoteWidmungNo ratings yet
- MIT18 102s21 Lec1Document7 pagesMIT18 102s21 Lec1vladimirNo ratings yet
- Tensor Algebra and Tensor Analysis For Engineers by Mikhail ItskovDocument6 pagesTensor Algebra and Tensor Analysis For Engineers by Mikhail Itskovchemicalchouhan9303No ratings yet
- MIT18 102s21 Full LecDocument125 pagesMIT18 102s21 Full LecProNo ratings yet
- Libro Fasshauer Numerico AvanzadoDocument151 pagesLibro Fasshauer Numerico AvanzadoCarlysMendozaamorNo ratings yet
- Stefanie Gerke Based On Notes by James MckeeDocument2 pagesStefanie Gerke Based On Notes by James Mckeeecd4282003No ratings yet
- Physics 731 Lecture Notes 1Document57 pagesPhysics 731 Lecture Notes 1Yung-Ta SungNo ratings yet
- Course: ELL 701 - Mathematical Methods in Control Instructor: M. NabiDocument8 pagesCourse: ELL 701 - Mathematical Methods in Control Instructor: M. NabiHeather ClevelandNo ratings yet
- Ise Vmath109Document57 pagesIse Vmath109ChangDong SunNo ratings yet
- Functional AnalysisDocument73 pagesFunctional AnalysisGVFNo ratings yet
- Electro Magnetic Field Theory NotesDocument149 pagesElectro Magnetic Field Theory NotesactuatorNo ratings yet
- Lec# 3Document4 pagesLec# 3Batool MurtazaNo ratings yet
- Vector Spaces: Persson@berkeley - EduDocument4 pagesVector Spaces: Persson@berkeley - Eduvivek patelNo ratings yet
- Vmlschp1 VectorsDocument16 pagesVmlschp1 VectorsJustA DummyNo ratings yet
- Vector Spaces PDFDocument6 pagesVector Spaces PDFSyed AkramNo ratings yet
- Crash Course The Math of Quantum Mechanics PDFDocument6 pagesCrash Course The Math of Quantum Mechanics PDFhuha818No ratings yet
- AE 2101 Linear Spaces Revised PDFDocument41 pagesAE 2101 Linear Spaces Revised PDFRija Akhal HilmiNo ratings yet
- Linear Algebra Assignment HelpDocument14 pagesLinear Algebra Assignment Helpmathsassignmenthelp100% (1)
- Invariant SubspacesDocument7 pagesInvariant SubspacesDipro MondalNo ratings yet
- Support Vector MachinesDocument32 pagesSupport Vector MachinesGeorge PaulNo ratings yet
- AlgebraVectorialTranspDocument144 pagesAlgebraVectorialTranspAleks MárquezNo ratings yet
- 선형대수 강의노트 kwak, hongDocument45 pages선형대수 강의노트 kwak, hongKihong KimNo ratings yet
- Prabhat Chowdhury PDFDocument295 pagesPrabhat Chowdhury PDFArkadebSenguptaNo ratings yet
- An Introduction to Linear Algebra and TensorsFrom EverandAn Introduction to Linear Algebra and TensorsRating: 1 out of 5 stars1/5 (1)
- Why It's Almost Impossible To Run 100 Meters in 9 Seconds - WIREDDocument3 pagesWhy It's Almost Impossible To Run 100 Meters in 9 Seconds - WIREDW-d DomNo ratings yet
- Ellse Transferring Not TransformingDocument5 pagesEllse Transferring Not TransformingW-d DomNo ratings yet
- Surface of A Rotating LiquidDocument1 pageSurface of A Rotating LiquidW-d DomNo ratings yet
- Questions On Magnets - DomainsDocument2 pagesQuestions On Magnets - DomainsW-d DomNo ratings yet
- Force - Fill in The Blanks - WorksheetDocument2 pagesForce - Fill in The Blanks - WorksheetW-d DomNo ratings yet
- Electricity WorksheetDocument1 pageElectricity WorksheetW-d DomNo ratings yet
- Comparison Syllabus A LevelDocument3 pagesComparison Syllabus A LevelW-d DomNo ratings yet
- Subject Knowledge Audit - KS4 PhysicsDocument2 pagesSubject Knowledge Audit - KS4 PhysicsW-d DomNo ratings yet
- Lesson 1 Forces and MotionDocument4 pagesLesson 1 Forces and MotionW-d DomNo ratings yet
- Key Stage 3 Science Subject Knowledge AuditDocument2 pagesKey Stage 3 Science Subject Knowledge AuditW-d DomNo ratings yet
- Subject Knowledge Audit - A Level PhysicsDocument4 pagesSubject Knowledge Audit - A Level PhysicsW-d DomNo ratings yet
- Derivation of Gravitational Potential Energy Using Calculus2Document7 pagesDerivation of Gravitational Potential Energy Using Calculus2W-d DomNo ratings yet
- Percentages - Lesson PlanDocument4 pagesPercentages - Lesson PlanW-d DomNo ratings yet
- Factorise, Fully, The Following Quadratic ExpressionsDocument3 pagesFactorise, Fully, The Following Quadratic ExpressionsW-d DomNo ratings yet
- Evaporative CoolingDocument6 pagesEvaporative CoolingW-d DomNo ratings yet
- Games List For SwitchDocument1 pageGames List For SwitchW-d DomNo ratings yet
- Open University ModulesDocument1 pageOpen University ModulesW-d DomNo ratings yet
- Modelling and Problem Solving MOOC PLAN For Each ChapterDocument2 pagesModelling and Problem Solving MOOC PLAN For Each ChapterW-d DomNo ratings yet
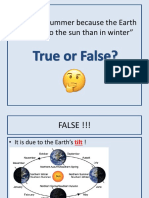
- We Have Summer Because The Earth Is Nearer To The Sun Than in WinterDocument11 pagesWe Have Summer Because The Earth Is Nearer To The Sun Than in WinterW-d DomNo ratings yet
- Radioactive Decay - DerivationDocument3 pagesRadioactive Decay - DerivationW-d DomNo ratings yet
- Derivation of Gravitational Potential Energy Using Calculus2Document7 pagesDerivation of Gravitational Potential Energy Using Calculus2W-d DomNo ratings yet
- Book 1Document2 pagesBook 1W-d DomNo ratings yet
- Mpemba Names: Firth, Walker, Freeman (Dissolved Gases) - EnthalpyDocument1 pageMpemba Names: Firth, Walker, Freeman (Dissolved Gases) - EnthalpyW-d DomNo ratings yet
- Specific Charge-Calculated ExamplesDocument1 pageSpecific Charge-Calculated ExamplesW-d DomNo ratings yet
- SupercoolingDocument1 pageSupercoolingW-d DomNo ratings yet
- FM Transmitter ReportDocument2 pagesFM Transmitter ReportW-d DomNo ratings yet
- BSC Potential Projects Lumbsden - Climate PhysicsDocument1 pageBSC Potential Projects Lumbsden - Climate PhysicsW-d DomNo ratings yet
- Mascara MR Robot - FsocietyDocument1 pageMascara MR Robot - FsocietyPRUEBADELAVIDANo ratings yet
- Practical Calculations For Ideal SystemsDocument20 pagesPractical Calculations For Ideal SystemsW-d DomNo ratings yet
- Micrometer - ReadingsDocument2 pagesMicrometer - ReadingsW-d DomNo ratings yet
- Mark Scheme Jan 2005Document116 pagesMark Scheme Jan 2005OE94No ratings yet
- Vector AnalysisDocument77 pagesVector Analysisalenair888100% (1)
- Tesla Patent ACCELERATED MATHEMATICAL ENGINEDocument12 pagesTesla Patent ACCELERATED MATHEMATICAL ENGINECharles GrossNo ratings yet
- Towards A Combinatorial Theory of Multiple Orthogonal PolynomialsDocument86 pagesTowards A Combinatorial Theory of Multiple Orthogonal PolynomialsDan Drake100% (1)
- ME 121: Engineering MechanicsDocument26 pagesME 121: Engineering MechanicsMuhammad FahadNo ratings yet
- Intro TensorsDocument58 pagesIntro TensorsMaaaranmaniNo ratings yet
- Basic MATLAB Programming CourseDocument155 pagesBasic MATLAB Programming CourseriyaNo ratings yet
- Chapter 1Document30 pagesChapter 1Jia KhanNo ratings yet
- Multiplication of VectorsDocument8 pagesMultiplication of VectorschashmaNo ratings yet
- 3-2 Unit Vectors, Adding Vectors by ComponentsDocument15 pages3-2 Unit Vectors, Adding Vectors by ComponentsAlexa GonzalesNo ratings yet
- VectorsDocument27 pagesVectorsSuthara SudhakaranNo ratings yet
- p1 Vectors Revision PackDocument20 pagesp1 Vectors Revision PackFonNo ratings yet
- Statics of Rigid Bodies Chapter 2: VectorDocument56 pagesStatics of Rigid Bodies Chapter 2: VectorMac KYNo ratings yet
- A Student's Guide To Geophysical Equations (W. Lowrie 2011) PDFDocument296 pagesA Student's Guide To Geophysical Equations (W. Lowrie 2011) PDFFabian Martinez100% (8)
- Tony Rothman, Steve Warner - Physics Mastery For Advanced High School Students - Complete Physics Review With 400 SAT and AP Physics Questions-Get 800 Test Prep (2016)Document318 pagesTony Rothman, Steve Warner - Physics Mastery For Advanced High School Students - Complete Physics Review With 400 SAT and AP Physics Questions-Get 800 Test Prep (2016)Janet PamNo ratings yet
- Engineering Mechanics: Statics: BNJ 10203 Lecture #9 By, Dalila Mohd HarunDocument10 pagesEngineering Mechanics: Statics: BNJ 10203 Lecture #9 By, Dalila Mohd HarunFahmi FauziNo ratings yet
- Chapter III: TensorsDocument9 pagesChapter III: Tensorssayandatta1No ratings yet
- CS602 Midterm Objective (MCQ'Z) Solved With Reference: by Well Wisher (Aqua Leo)Document12 pagesCS602 Midterm Objective (MCQ'Z) Solved With Reference: by Well Wisher (Aqua Leo)blanooba231No ratings yet
- Work As A Dot ProductDocument11 pagesWork As A Dot ProductMarArizalaNo ratings yet
- 2017 Fall ME501 06 VectorCalculusDocument95 pages2017 Fall ME501 06 VectorCalculusAfaq AhmedNo ratings yet
- IAL FP3 June 2019 Mark Scheme PDFDocument28 pagesIAL FP3 June 2019 Mark Scheme PDFJohn JohnsonNo ratings yet
- Electromagnetic Theory MCQ (1) - Removed (1) - WatermarkDocument278 pagesElectromagnetic Theory MCQ (1) - Removed (1) - WatermarkNEROB KUMAR MOHONTO XRLNZGkUXmNo ratings yet
- Vector AlgebraDocument39 pagesVector AlgebraKuntal Satpathi100% (1)
- Electromagnetic Waves and Transmission LinesDocument180 pagesElectromagnetic Waves and Transmission LinesGurusreenuNo ratings yet
- Treatise of Plane Geometry Through Geometric Algebra - R G CalvetDocument290 pagesTreatise of Plane Geometry Through Geometric Algebra - R G Calvetw2006y100% (1)
- Module 4 - Dot and Cross Product PDFDocument15 pagesModule 4 - Dot and Cross Product PDFsubyNo ratings yet
- Vector Analysis PDFDocument5 pagesVector Analysis PDFasdfghjNo ratings yet
- M2 Publisher New Century E Book Answers-NCM (2nd) TMM2B12 - eDocument39 pagesM2 Publisher New Century E Book Answers-NCM (2nd) TMM2B12 - eStevenson DavidNo ratings yet
- Linear Algebra I-1 PDFDocument146 pagesLinear Algebra I-1 PDFDoktoru ShekaNo ratings yet
- MPH02Document538 pagesMPH02mpegsterNo ratings yet