You might also like
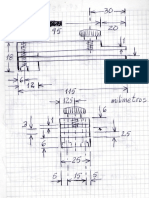
- Dimensiones Sensor Esfuerzos Maxilofaciales PDFDocument1 pageDimensiones Sensor Esfuerzos Maxilofaciales PDFCarolina ArboledaNo ratings yet
- Capitulo 9 Version Otono VarDocument22 pagesCapitulo 9 Version Otono VarCarolina ArboledaNo ratings yet
- Dimensiones Sensor Esfuerzos Maxilofaciales PDFDocument1 pageDimensiones Sensor Esfuerzos Maxilofaciales PDFCarolina ArboledaNo ratings yet
- Estimacion de Incertidumbre GUMDocument18 pagesEstimacion de Incertidumbre GUMturbio15No ratings yet
- Seminarios VHDLDocument131 pagesSeminarios VHDLJoel David Torres HernandezNo ratings yet
- Medicion de Esfuerzos y Deformaciones en BarrasDocument7 pagesMedicion de Esfuerzos y Deformaciones en BarrasCarolina ArboledaNo ratings yet
- Lab 4 Electro 2Document6 pagesLab 4 Electro 2Carolina ArboledaNo ratings yet
- 4 Diseño 2Document64 pages4 Diseño 2Carolina ArboledaNo ratings yet
- Seminarios VHDLDocument131 pagesSeminarios VHDLJoel David Torres HernandezNo ratings yet
- Fase2 Proyecto AnayComp 2015Document2 pagesFase2 Proyecto AnayComp 2015Carolina ArboledaNo ratings yet
- Csfebrero2012 - Baja Malos HabitosDocument4 pagesCsfebrero2012 - Baja Malos HabitoslravazzanoNo ratings yet
- Fuerzas Concurrentes (Informe)Document8 pagesFuerzas Concurrentes (Informe)Carolina ArboledaNo ratings yet
- Carga y Descarga CondensadorDocument13 pagesCarga y Descarga CondensadorSahin PerezNo ratings yet
- Moment Ode FuerzaDocument4 pagesMoment Ode FuerzaCarolina ArboledaNo ratings yet
- Acciones para Impulsar La Etica en Un Centro de Trabajo (Desarrollo Humano)Document28 pagesAcciones para Impulsar La Etica en Un Centro de Trabajo (Desarrollo Humano)Anggely Sarina Camargo VelizNo ratings yet
- Manual Auditorias Liquidos y GasDocument25 pagesManual Auditorias Liquidos y GasLuis Carlos Uribe CorredorNo ratings yet
- Guia AulaCesga Profe ESDocument39 pagesGuia AulaCesga Profe ESelearningcesgaNo ratings yet
- Autores InteligenciaDocument5 pagesAutores InteligenciaCecilia MoralesNo ratings yet
- SESIÓN DE APRENDIZAJE #4 - IVUNIDAD VESCRIBIMOS Un ArtículoDocument9 pagesSESIÓN DE APRENDIZAJE #4 - IVUNIDAD VESCRIBIMOS Un ArtículoROSA YOLVI FERNANDEZ PIMENTELNo ratings yet
- Habilidades Comunicativas Dentro Del Proceso de Enseñanza - Aprendizaje - Aspectos Básicos.Document10 pagesHabilidades Comunicativas Dentro Del Proceso de Enseñanza - Aprendizaje - Aspectos Básicos.Javier TorresNo ratings yet
- Guía de Trabajo V - PLeo - 1ro 2daDocument35 pagesGuía de Trabajo V - PLeo - 1ro 2daPaola AntúnezNo ratings yet
- Boe A 2022 17652Document1 pageBoe A 2022 17652Paco UtreraNo ratings yet
- Nabokov Vladimir Curso de Literatura Europea PDFDocument8 pagesNabokov Vladimir Curso de Literatura Europea PDFAlba Burgos AlmarázNo ratings yet
- AutomaizacionDocument128 pagesAutomaizacionAriel ChumaceroNo ratings yet
- Diferencias de Responsabilidad Civil y Penal en Relacion A EnfermeriaDocument3 pagesDiferencias de Responsabilidad Civil y Penal en Relacion A EnfermeriaLeslie Thalia Rojas JustinianoNo ratings yet
- Taller Gestion EmpresarialDocument107 pagesTaller Gestion Empresarialedwardcaqui100% (4)
- Aplicaciones de La Primera Ley de La TermodinamicaDocument3 pagesAplicaciones de La Primera Ley de La TermodinamicaInvensible Nahual Supremo Supremo100% (1)
- Ensayos Destructivos y No DestructivosDocument3 pagesEnsayos Destructivos y No DestructivosyeimyNo ratings yet
- Viviendo en El EspírituDocument2 pagesViviendo en El EspírituCielo PerezNo ratings yet
- 2019 - Manual de Soluciones Parenterales o IntravenosasDocument15 pages2019 - Manual de Soluciones Parenterales o IntravenosasAntonio Parra100% (8)
- Semana 1 - El Comportamiento Del Consumidor y El MarketingDocument22 pagesSemana 1 - El Comportamiento Del Consumidor y El MarketingelpikachuNo ratings yet
- Madres MensajesDocument3 pagesMadres MensajesAndres Camilo AriasNo ratings yet
- Planteamiento Del ProblemaDocument2 pagesPlanteamiento Del ProblemaAnthony G SánchezNo ratings yet
- Contenido (Tema Época Precolombina) ANEXOSDocument2 pagesContenido (Tema Época Precolombina) ANEXOSBritanny FerreraNo ratings yet
- El Cuento de La AbuelaDocument3 pagesEl Cuento de La AbuelaMariana SilvaNo ratings yet
- Expectativas Correctas Sobre El MatrimonioDocument4 pagesExpectativas Correctas Sobre El MatrimoniolagshalomNo ratings yet
- Tarea IIDocument4 pagesTarea IICrhis Angel Prado PumaNo ratings yet
- Act2.1 AparicioMendoza 108 CoCoDocument3 pagesAct2.1 AparicioMendoza 108 CoCoAntonio MendozaNo ratings yet
- Ingieneria DetalladaDocument312 pagesIngieneria DetalladaluciaNo ratings yet
- Sindrome de HELLP, REVISIÓN DE ARTICULOS Y CASOS CLINICOSDocument9 pagesSindrome de HELLP, REVISIÓN DE ARTICULOS Y CASOS CLINICOSLorena GonzalezNo ratings yet
- U5 Geometria 5toDocument2 pagesU5 Geometria 5toeduardo flores megoNo ratings yet
- Solucion Actividad Eje 4 Geopilitica ContemporaneaDocument10 pagesSolucion Actividad Eje 4 Geopilitica ContemporaneaAlejandra OlarteNo ratings yet
- Ejericicios para Aplicar Hoy!Document11 pagesEjericicios para Aplicar Hoy!Alejandro RamirezmachadoNo ratings yet
- Cuestrinario FilosofiaDocument3 pagesCuestrinario FilosofiaJulio CabronNo ratings yet