You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Agrodok-series+No 24+urban+agriculture PDFDocument78 pagesAgrodok-series+No 24+urban+agriculture PDFWaqas Murtaza100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Aims MathematicsDocument19 pagesAims MathematicsBoutiara AbdellatifNo ratings yet
- 769513Document196 pages769513Aman SrivastavaNo ratings yet
- Urban Gardening Fact Sheet PDFDocument12 pagesUrban Gardening Fact Sheet PDFWaqas MurtazaNo ratings yet
- Glossary of English To Pakistani TermsDocument5 pagesGlossary of English To Pakistani TermsWaqas MurtazaNo ratings yet
- Aqaid QuizDocument49 pagesAqaid QuizWaqas MurtazaNo ratings yet
- Book Tohjeehat 1 by Raees Amrohi: Tawajoo Kia HaiDocument3 pagesBook Tohjeehat 1 by Raees Amrohi: Tawajoo Kia HaiWaqas MurtazaNo ratings yet
- F - Edited - Dr. Anila Amber Malik & Erum RiazDocument20 pagesF - Edited - Dr. Anila Amber Malik & Erum RiazWaqas MurtazaNo ratings yet
- Week 3.2 Transcript The Imperfect (Mudhari) VerbDocument14 pagesWeek 3.2 Transcript The Imperfect (Mudhari) VerbWaqas MurtazaNo ratings yet
- Its in The Way That You Use ItDocument3 pagesIts in The Way That You Use ItWaqas MurtazaNo ratings yet
- Links - Books of Jamia Tul Madina Online: Kitab Ul AqaidDocument1 pageLinks - Books of Jamia Tul Madina Online: Kitab Ul AqaidWaqas MurtazaNo ratings yet
- Implementation of The Hilber-Hughes-Taylor Method in The Context of Index 3 Differential-Algebraic Equations of Multibody DynamicsDocument13 pagesImplementation of The Hilber-Hughes-Taylor Method in The Context of Index 3 Differential-Algebraic Equations of Multibody Dynamics广岩 魏No ratings yet
- Syllabus For Electrical EngineeringDocument4 pagesSyllabus For Electrical EngineeringNandgulabDeshmukhNo ratings yet
- Module 1 Introduction To Differential EquationsDocument5 pagesModule 1 Introduction To Differential EquationsJade B. BermasNo ratings yet
- M.tech Internal CombustionDocument52 pagesM.tech Internal CombustionRagul JoseNo ratings yet
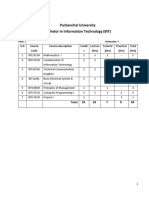
- Purbanchal University Bachelor in Information Technology (BIT)Document121 pagesPurbanchal University Bachelor in Information Technology (BIT)Řohan DhakalNo ratings yet
- Syllabus ISUTDocument114 pagesSyllabus ISUTWaniBazillaNo ratings yet
- Lecture 15 To 22 - Solution of Differential EquationsDocument58 pagesLecture 15 To 22 - Solution of Differential EquationsDSYMEC224Trupti BagalNo ratings yet
- Ashenafi AgizawDocument103 pagesAshenafi AgizawTesfaye Teferi ShoneNo ratings yet
- 18.034 Honors Differential Equations: Mit OpencoursewareDocument4 pages18.034 Honors Differential Equations: Mit OpencoursewareParatus AlcántaraNo ratings yet
- JEE Main Maths Differential Equations Previous Year Questions With SolutionsDocument8 pagesJEE Main Maths Differential Equations Previous Year Questions With SolutionsShashi CharanNo ratings yet
- Mass Spring SystemDocument25 pagesMass Spring SystemKhoironSyamdatuNo ratings yet
- Unit 3Document66 pagesUnit 3GoliBharggavNo ratings yet
- MTH603 Spring - 2010 - FinalTerm - OPKSTDocument11 pagesMTH603 Spring - 2010 - FinalTerm - OPKSTYasir WaseemNo ratings yet
- A Brief Introduction To Partial Differential Equations: Introductory Course On Multiphysics ModellingDocument119 pagesA Brief Introduction To Partial Differential Equations: Introductory Course On Multiphysics ModellingHottua GultomNo ratings yet
- EBE Electrical PowerDocument21 pagesEBE Electrical PowerALBERTNo ratings yet
- Zhaoyang Wang, Stefan Miska, Mengjiao Yu, Nicholas TakachDocument18 pagesZhaoyang Wang, Stefan Miska, Mengjiao Yu, Nicholas Takachahmalisha2No ratings yet
- Engineering Mathematics Syllabus 1st YearDocument3 pagesEngineering Mathematics Syllabus 1st YearKhalnayak ChatpatiNo ratings yet
- Verification and Validation in Computational Solid Mechanics and The ASME Standards CommitteeDocument9 pagesVerification and Validation in Computational Solid Mechanics and The ASME Standards CommitteeNguyenNo ratings yet
- Gate-Me-2024, V-IiDocument401 pagesGate-Me-2024, V-Iiyash guptaNo ratings yet
- Biomed Flow ChartDocument2 pagesBiomed Flow ChartTyler AnthonyNo ratings yet
- 44 Diffrential Equations Part 2 of 3Document14 pages44 Diffrential Equations Part 2 of 3ayushNo ratings yet
- B.SC., MathematicsDocument68 pagesB.SC., MathematicsSakthivelNo ratings yet
- UG Curriculum With Course Details Final 130716 PDFDocument118 pagesUG Curriculum With Course Details Final 130716 PDFHoney RathoreNo ratings yet
- Greens FunctionsDocument56 pagesGreens FunctionsCarolina BouvierNo ratings yet
- Relation and Function Case Study 1Document46 pagesRelation and Function Case Study 1Firaz MNo ratings yet
- Exact and Inexact Differential EquationDocument19 pagesExact and Inexact Differential EquationRyanChristianSuplitoNo ratings yet
- Syllabus For Electronics and Communication Engineering (EC) : Linear AlgebraDocument3 pagesSyllabus For Electronics and Communication Engineering (EC) : Linear Algebraapi-273759951No ratings yet
- 4th Sem Syllabus of RGPV Bhopal CseDocument14 pages4th Sem Syllabus of RGPV Bhopal CseSubhankerNo ratings yet