You might also like
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- ARM Microcontrollers Programming for Embedded SystemsFrom EverandARM Microcontrollers Programming for Embedded SystemsRating: 5 out of 5 stars5/5 (1)
- TimersDocument37 pagesTimersAnastasia PestereanNo ratings yet
- STM32F3 TimersDocument75 pagesSTM32F3 TimersVport Port100% (1)
- MSP430 Timers and PWMDocument13 pagesMSP430 Timers and PWManhhungkenNo ratings yet
- Programmable Timing Functions Part 1: Timer-Generated InterruptsDocument26 pagesProgrammable Timing Functions Part 1: Timer-Generated InterruptsRavi KanthNo ratings yet
- Programmable Timing Functions Part 1: Timer-Generated InterruptsDocument25 pagesProgrammable Timing Functions Part 1: Timer-Generated InterruptsBui Van PhatNo ratings yet
- Control DC Motor Speed using STM32 PWMDocument4 pagesControl DC Motor Speed using STM32 PWMJohn FarandisNo ratings yet
- Microcontrollers LabDocument19 pagesMicrocontrollers LabAMARNATHNAIDU77No ratings yet
- Lectures-15 Input Capture, SONARDocument37 pagesLectures-15 Input Capture, SONARmitjakuaNo ratings yet
- AVR_Timers0Document32 pagesAVR_Timers0Muhammad ejaz RamzanNo ratings yet
- Introduction To MSP430 MicrocontrollersDocument32 pagesIntroduction To MSP430 MicrocontrollersAlejandro OrtizNo ratings yet
- MPBES Lab 6Document3 pagesMPBES Lab 6ahmedNo ratings yet
- Parallel Timer InterfaceDocument13 pagesParallel Timer InterfaceRiham AbdallahNo ratings yet
- UNIT_3 (1)Document62 pagesUNIT_3 (1)sreekar723No ratings yet
- HBridgeMotorControl With PICDocument11 pagesHBridgeMotorControl With PICcoceicr100% (3)
- STM32 Timer Features for Timing ApplicationsDocument91 pagesSTM32 Timer Features for Timing ApplicationsnorbertscribdNo ratings yet
- ES Exp 10Document13 pagesES Exp 10Maryam TariqNo ratings yet
- Special Event Trigger For PIC32 by Bruce MisnerDocument3 pagesSpecial Event Trigger For PIC32 by Bruce MisnerPaquito Rodríguez RodillaNo ratings yet
- Infineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENDocument42 pagesInfineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENFatenn BellakhdharNo ratings yet
- Avr ArchitectureDocument29 pagesAvr ArchitectureOdoch HerbertNo ratings yet
- DEMO9S08QG8 - APP Example Application User GuideDocument4 pagesDEMO9S08QG8 - APP Example Application User GuideEDERTREVISANNo ratings yet
- MCES 18CS44 Unit4 2020 TIMERSDocument13 pagesMCES 18CS44 Unit4 2020 TIMERSSAKSHAM PRASADNo ratings yet
- 4.6 TimersDocument22 pages4.6 TimersHamzah MohammedNo ratings yet
- Egg Timer TutorialDocument8 pagesEgg Timer Tutorials3th137No ratings yet
- En - stm32l4 WDG Timers GptimDocument64 pagesEn - stm32l4 WDG Timers GptimGia LữNo ratings yet
- LPC1769 Interrupt ProgramDocument9 pagesLPC1769 Interrupt Programprathap100% (1)
- Setup and Use The AVR® TimersDocument16 pagesSetup and Use The AVR® Timersmike_helplineNo ratings yet
- NDSU Timer2 Interrupt ExampleDocument11 pagesNDSU Timer2 Interrupt ExampleCesar Matos100% (2)
- ShortTest2-2016 SolutionDocument2 pagesShortTest2-2016 SolutionYash MaharajNo ratings yet
- 7 Capture Compare PWMDocument19 pages7 Capture Compare PWMcrazyllmonkeyNo ratings yet
- Course On MicrocontrollersDocument115 pagesCourse On MicrocontrollersKorom ChandNo ratings yet
- PWMC - Pulse Width Modulation ControllerDocument19 pagesPWMC - Pulse Width Modulation ControllerRaman GuptaNo ratings yet
- AVR 133: Long Delay Generation Using The AVR MicrocontrollerDocument8 pagesAVR 133: Long Delay Generation Using The AVR MicrocontrollernicoletabytaxNo ratings yet
- TRISC 0 // Set Direction To Be Output 0 Output 1 InputDocument7 pagesTRISC 0 // Set Direction To Be Output 0 Output 1 Inputiri_scribdNo ratings yet
- MPBES Lab 7Document4 pagesMPBES Lab 7ahmedNo ratings yet
- Timers and InterruptDocument38 pagesTimers and Interrupt21146387No ratings yet
- PWMDocument17 pagesPWMmaintboardNo ratings yet
- AN594 - Using The CCP Module(s)Document25 pagesAN594 - Using The CCP Module(s)Guillermo Hernandez100% (3)
- Digital Control Master Training LessonDocument61 pagesDigital Control Master Training Lessoncms124dNo ratings yet
- Time Operated Electrical Appliance Control SystemDocument82 pagesTime Operated Electrical Appliance Control Systempoozu100% (1)
- Timer Functions for Capture, Compare, PWMDocument16 pagesTimer Functions for Capture, Compare, PWMShivanshuAgarwalNo ratings yet
- Embedded Rev ThreeDocument12 pagesEmbedded Rev ThreeishmaelnjihiaNo ratings yet
- PIC16F877 Timer Modules Tutorials - PIC Timer0 Tutorial PDFDocument3 pagesPIC16F877 Timer Modules Tutorials - PIC Timer0 Tutorial PDFvka_prince100% (1)
- End Sem ExamDocument20 pagesEnd Sem Examdorejis472No ratings yet
- En - stm32f7 WDG Timers GptimDocument61 pagesEn - stm32f7 WDG Timers GptimLODELBARRIO RDNo ratings yet
- Development Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Document13 pagesDevelopment Board For Stm8S003F3: by Nitin Chand M S (2018H1400171P), Rohith Krishnan P (2018H1400180P)Thông NguyễnNo ratings yet
- Project 2nd 1Document11 pagesProject 2nd 1datdrakuNo ratings yet
- Power Point PresentationDocument17 pagesPower Point PresentationVNo ratings yet
- Timers of ATmega328PDocument26 pagesTimers of ATmega328PZaryab Khalil SiddiqueNo ratings yet
- PWM Motor ControllerDocument44 pagesPWM Motor ControllerTrương Tuấn VũNo ratings yet
- PLC Training PowerpointDocument35 pagesPLC Training PowerpointThomas Smith100% (1)
- "msp430x20x2.h": // TXD On P1.1 // RXD On P1.2Document6 pages"msp430x20x2.h": // TXD On P1.1 // RXD On P1.2oravetznNo ratings yet
- 16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerDocument12 pages16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerLauderi MartinsNo ratings yet
- Clocks and Timers-Sources & Controls-2Document8 pagesClocks and Timers-Sources & Controls-2SUNOJ RAICARNo ratings yet
- CCP PWMDocument19 pagesCCP PWMalaa_saq100% (1)
- GSM Home SecurityDocument52 pagesGSM Home SecurityCheedella Subbarao100% (1)
- PT 4Document70 pagesPT 4gprem89No ratings yet
- STM32 Timers TutorialDocument6 pagesSTM32 Timers TutorialHossein MajidiNo ratings yet
- Ee105 6Document28 pagesEe105 6Saravanan T YNo ratings yet
- Ee105 5Document32 pagesEe105 5Saravanan T YNo ratings yet
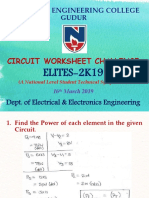
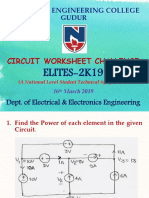
- Circuit WorkSheet Challenge KeyDocument9 pagesCircuit WorkSheet Challenge KeySaravanan T YNo ratings yet
- Control of Induction MotorsDocument80 pagesControl of Induction MotorsSaravanan T YNo ratings yet
- Department of Technical Education Andhra PradeshDocument36 pagesDepartment of Technical Education Andhra PradeshSaravanan T YNo ratings yet
- Control of DC Motors by 3-φ ConvertersDocument16 pagesControl of DC Motors by 3-φ ConvertersSaravanan T YNo ratings yet
- Ee105 1Document32 pagesEe105 1Saravanan T YNo ratings yet
- Ohm's Law and Electric CurrentDocument34 pagesOhm's Law and Electric CurrentSaravanan T YNo ratings yet
- Introduction to Basic Principles of Electricity and Ohm's LawDocument26 pagesIntroduction to Basic Principles of Electricity and Ohm's LawSaravanan T YNo ratings yet
- Circuit WorkSheet Challenge KeyDocument9 pagesCircuit WorkSheet Challenge KeySaravanan T YNo ratings yet
- Speed Control of Synchronous MotorsDocument12 pagesSpeed Control of Synchronous MotorsSaravanan T YNo ratings yet
- Circuit WorkSheet ChallengeDocument9 pagesCircuit WorkSheet ChallengeSaravanan T YNo ratings yet
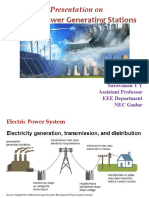
- Electric Power Systems: An OverviewDocument29 pagesElectric Power Systems: An OverviewSaravanan T YNo ratings yet
- Control of DC Motors by 1-φ ConvertersDocument6 pagesControl of DC Motors by 1-φ ConvertersSaravanan T YNo ratings yet
- 4 - Control of Induction MotorDocument23 pages4 - Control of Induction MotorSaravanan T YNo ratings yet
- DC Machines: Faraday's Laws and ConstructionDocument34 pagesDC Machines: Faraday's Laws and ConstructionSaravanan T YNo ratings yet
- Unit-1 - DC & AC Circuits PDFDocument60 pagesUnit-1 - DC & AC Circuits PDFSaravanan T Y100% (5)
- Induction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurDocument18 pagesInduction Motor: Saravanan T Y Assistant Professor EEE Department NEC GudurSaravanan T YNo ratings yet
- UNIT - 2 - DC & AC MachinesDocument17 pagesUNIT - 2 - DC & AC MachinesSaravanan T YNo ratings yet
- UNIT - 2 - DC & AC MachinesDocument17 pagesUNIT - 2 - DC & AC MachinesSaravanan T YNo ratings yet
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- Ii. Iii I: AcademicDocument1 pageIi. Iii I: AcademicSaravanan T YNo ratings yet
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Document9 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERING OBJECTIVE III B.Tech – EEE (R15) SUB: Electrical Machines-III (15A02504Saravanan T YNo ratings yet
- Electrical Machine 1Document10 pagesElectrical Machine 1Irfan NaqviNo ratings yet
- Narayana Engineering College Power Semiconductor Drives SubjectiveDocument7 pagesNarayana Engineering College Power Semiconductor Drives SubjectiveSaravanan T YNo ratings yet
- Arm7 Scrib1Document72 pagesArm7 Scrib1Saravanan T YNo ratings yet
- 3 ExperimentsDocument100 pages3 ExperimentsSaravanan T YNo ratings yet
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGDocument6 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGSaravanan T YNo ratings yet
- Synchronous Generators NotesDocument75 pagesSynchronous Generators NotesSaravanan T Y100% (1)
- SPSS-TEST Survey QuestionnaireDocument2 pagesSPSS-TEST Survey QuestionnaireAkshay PatelNo ratings yet
- GSMA Moile Money Philippines Case Study V X21 21Document23 pagesGSMA Moile Money Philippines Case Study V X21 21davidcloud99No ratings yet
- Project Report On Discontinuous Puf Panels Using Cyclopentane As A Blowing AgentDocument6 pagesProject Report On Discontinuous Puf Panels Using Cyclopentane As A Blowing AgentEIRI Board of Consultants and PublishersNo ratings yet
- The Seven Kings of Revelation 17Document9 pagesThe Seven Kings of Revelation 17rojelio100% (1)
- Teaching Support Untuk Managemen HRDocument102 pagesTeaching Support Untuk Managemen HRFernando FmchpNo ratings yet
- 2019 IL and Federal Pharmacy Law Review PDFDocument176 pages2019 IL and Federal Pharmacy Law Review PDFAnonymous 3YNJfYNQ100% (5)
- Recent Developments in Ultrasonic NDT Modelling in CIVADocument7 pagesRecent Developments in Ultrasonic NDT Modelling in CIVAcal2_uniNo ratings yet
- Book3 79 111000 0000100120 DAH MPL RPT 000005 - ADocument101 pagesBook3 79 111000 0000100120 DAH MPL RPT 000005 - ANassif Abi AbdallahNo ratings yet
- MB0042-MBA-1st Sem 2011 Assignment Managerial EconomicsDocument11 pagesMB0042-MBA-1st Sem 2011 Assignment Managerial EconomicsAli Asharaf Khan100% (3)
- History of Veterinary MedicineDocument25 pagesHistory of Veterinary MedicineAli AsadullahNo ratings yet
- MMADDocument2 pagesMMADHariharan SNo ratings yet
- Non Deterministic Finite AutomataDocument30 pagesNon Deterministic Finite AutomataAnikNo ratings yet
- Re: Laparoscopic Myomectomy: A Review of Alternatives, Techniques and ControversiesDocument1 pageRe: Laparoscopic Myomectomy: A Review of Alternatives, Techniques and ControversiesMayada OsmanNo ratings yet
- TEI - of - Microsoft - Business Central - FINALDocument23 pagesTEI - of - Microsoft - Business Central - FINALMarketing ComesaNo ratings yet
- The Pathogenic Basis of Malaria: InsightDocument7 pagesThe Pathogenic Basis of Malaria: InsightRaena SepryanaNo ratings yet
- Dryers in Word FileDocument5 pagesDryers in Word FileHaroon RahimNo ratings yet
- IntuitionDocument10 pagesIntuitionmailsonNo ratings yet
- Indian ChronologyDocument467 pagesIndian ChronologyModa Sattva100% (4)
- E.bs 3rd-Unit 22Document46 pagesE.bs 3rd-Unit 22DUONG LE THI THUYNo ratings yet
- Rhetorical Analysis ArticleDocument6 pagesRhetorical Analysis Articleapi-242472728No ratings yet
- Rethinking Classification and Localization For Object DetectionDocument13 pagesRethinking Classification and Localization For Object DetectionShah Nawaz KhanNo ratings yet
- Jeremy Hughes ReviewDocument5 pagesJeremy Hughes ReviewgracecavNo ratings yet
- Manual de Instruções Iveco Eurocargo Euro 6Document226 pagesManual de Instruções Iveco Eurocargo Euro 6rsp filmes100% (1)
- Topic1 Whole NumberDocument22 pagesTopic1 Whole NumberDayang Siti AishahNo ratings yet
- D2DDocument2 pagesD2Dgurjit20No ratings yet
- Complimentary JournalDocument58 pagesComplimentary JournalMcKey ZoeNo ratings yet
- Science SimulationsDocument4 pagesScience Simulationsgk_gbuNo ratings yet
- Math-149 MatricesDocument26 pagesMath-149 MatricesKurl Vincent GamboaNo ratings yet
- Asus X553MA Repair Guide Rev2.0Document7 pagesAsus X553MA Repair Guide Rev2.0UMA AKANDU UCHENo ratings yet
- Practical Finite Element Simulations With SOLIDWORKS 2022Document465 pagesPractical Finite Element Simulations With SOLIDWORKS 2022knbgamageNo ratings yet