You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- JOydeep Theisis 10101006Document119 pagesJOydeep Theisis 10101006Deb PradhanNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Organic Farming BrochureDocument16 pagesOrganic Farming BrochureDeb PradhanNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Answer Key: Dudqdw Du DQ Q U WDocument13 pagesAnswer Key: Dudqdw Du DQ Q U WDeb PradhanNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- KTG SolutionDocument8 pagesKTG SolutionDeb PradhanNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Optimal Kinematic Synthesis of 6-Bar Rack and Pinion Ackerman Steering LinkageDocument10 pagesOptimal Kinematic Synthesis of 6-Bar Rack and Pinion Ackerman Steering LinkageDeb PradhanNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Integrated Longitudinal and Lateral Tire Road Friction Modeling and Monitoring For Vehicle Motion Control PDFDocument19 pagesIntegrated Longitudinal and Lateral Tire Road Friction Modeling and Monitoring For Vehicle Motion Control PDFDeb PradhanNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Forest Flower October 2018Document24 pagesForest Flower October 2018RAGUNATH PNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- GirishDocument7 pagesGirishgsalunkhe241287No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Labangon Elementary School Diagbostic Test in Epp/Tle 6 Directions: Multiple Choice. Choose The Correct The Letter of The Correct AnswerDocument4 pagesLabangon Elementary School Diagbostic Test in Epp/Tle 6 Directions: Multiple Choice. Choose The Correct The Letter of The Correct AnswerJulianFlorenzFalconeNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Assignment Class X Similar Triangles: A D E B CDocument2 pagesAssignment Class X Similar Triangles: A D E B CCRPF School100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Case Study Oil and Gas - PowerpointDocument8 pagesCase Study Oil and Gas - PowerpointYaxssNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 100% Chemical-Free Solution For Organic Farming: Where Health Is A HabitDocument2 pages100% Chemical-Free Solution For Organic Farming: Where Health Is A Habitamit4118No ratings yet
- Thermal Imaging Tech ResourceDocument20 pagesThermal Imaging Tech Resourceskimav86100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Layout - Foundation Drawing - Air BlowerDocument2 pagesLayout - Foundation Drawing - Air BlowerBabel THIAMNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Y10-lab-4-Gas LawDocument10 pagesY10-lab-4-Gas LawEusebio Torres TatayNo ratings yet
- Sawla - Laska (Lot - I) Road Project Hydrology - Hydraulics MDocument64 pagesSawla - Laska (Lot - I) Road Project Hydrology - Hydraulics Mashe zinab100% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- VK-53 (ВК-53) Erecting Cut-Out Switch: Maintenance ManualDocument76 pagesVK-53 (ВК-53) Erecting Cut-Out Switch: Maintenance ManualhaileNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Acid Alkaline Food ChartDocument3 pagesAcid Alkaline Food Chartgime2013No ratings yet
- Board of Technical Education Uttar Pradesh Lucknow: CODE 2298Document2 pagesBoard of Technical Education Uttar Pradesh Lucknow: CODE 2298Md Shaaz100% (1)
- QW PDFDocument45 pagesQW PDFkarthikeyan PNo ratings yet
- PGC Inquiries Chapter 7 Grid ProtectionDocument7 pagesPGC Inquiries Chapter 7 Grid ProtectionhansamvNo ratings yet
- Jurnal Semi FowlerDocument6 pagesJurnal Semi FowlerHartina RolobessyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Psychological Factors Influencing Technology Adoption A Case S - 2021 - TechnovDocument17 pagesPsychological Factors Influencing Technology Adoption A Case S - 2021 - Technov6helmi6nauval6No ratings yet
- HSE Plan For RSPL ProjectDocument10 pagesHSE Plan For RSPL ProjectSaibabu SiripurapuNo ratings yet
- Zen Intro To Buddhism & Practice of ZazenDocument33 pagesZen Intro To Buddhism & Practice of ZazendudcomeonNo ratings yet
- Pakistan PresentationDocument17 pagesPakistan PresentationYaseen Khan100% (1)
- Mechanical Components SectionDocument428 pagesMechanical Components Sectionxristo xristovNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Bioclim MaxentDocument9 pagesBioclim MaxentNicolás FrutosNo ratings yet
- B11R Jonckheere JHV2 SpecDocument1 pageB11R Jonckheere JHV2 SpecVishwanath SeetaramNo ratings yet
- MSDS Aradur 2965 PDFDocument9 pagesMSDS Aradur 2965 PDFkamalnandreNo ratings yet
- Vol 2 No S12022 Actasdela XVIIConferencia Mundialsobre CineantropometraDocument185 pagesVol 2 No S12022 Actasdela XVIIConferencia Mundialsobre CineantropometraAye JaimeNo ratings yet
- MultiCrystallineDataSheet - EN - SilikenDocument4 pagesMultiCrystallineDataSheet - EN - Silikensydneyaus2005No ratings yet
- 00 Calculator Techniques 02Document5 pages00 Calculator Techniques 02Sealtiel1020No ratings yet
- Schueco+FW+50+SG+ +FW+60+SGDocument1 pageSchueco+FW+50+SG+ +FW+60+SGDaniel Nedelcu100% (1)
- Chapter Eight - Vapour Compression CycleDocument37 pagesChapter Eight - Vapour Compression Cyclealhusseny100% (1)
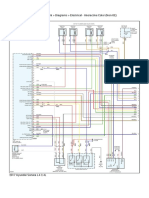
- 2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairDocument6 pages2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairChino PlagaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)