You might also like
- Automatic Garrage SystemDocument11 pagesAutomatic Garrage SystemTalha NayyarNo ratings yet
- Design and Fabrication of Mechanical Footstep Power GeneratorDocument19 pagesDesign and Fabrication of Mechanical Footstep Power GeneratorMonika kakadeNo ratings yet
- Project ReportDocument65 pagesProject ReportMusical world100% (1)
- Automatic Pneumatic Bumper For Four Wheeler Final Year Ieee Mech ProjectDocument60 pagesAutomatic Pneumatic Bumper For Four Wheeler Final Year Ieee Mech ProjectAnkit YadavNo ratings yet
- Automatic Mechanical Garage Door Opener ProjectDocument2 pagesAutomatic Mechanical Garage Door Opener Projectpramo_dassNo ratings yet
- Automatic Side Stand With Breaking Locking SystemDocument44 pagesAutomatic Side Stand With Breaking Locking SystemSaravanan Viswakarma100% (2)
- Project Report Hybrid Electric VehicleDocument19 pagesProject Report Hybrid Electric VehicleMeet MehtaNo ratings yet
- Garage Door OpenerDocument7 pagesGarage Door OpenerPlaban Pratim BhuyanNo ratings yet
- Coin Based Water Controlling SystemDocument34 pagesCoin Based Water Controlling SystemSanthosh Guduru75% (4)
- Automatic Head Lamp Alignment SystemDocument48 pagesAutomatic Head Lamp Alignment SystemAakash Dindigul100% (1)
- Designing a sugarcane bud cutting machineDocument16 pagesDesigning a sugarcane bud cutting machineVenNo ratings yet
- Minor ProjectDocument23 pagesMinor ProjectDeepak Kumar SinghNo ratings yet
- Design and Fabrication of Power Generation Shock AbsorberDocument1 pageDesign and Fabrication of Power Generation Shock AbsorberVijay GanapathyNo ratings yet
- Compressed Air Production Using Vehicle SuspensionDocument20 pagesCompressed Air Production Using Vehicle SuspensioncolinvargheseNo ratings yet
- Design and Analysis of River Water Cleaning MachineDocument6 pagesDesign and Analysis of River Water Cleaning MachineNavratan JagnadeNo ratings yet
- Design and Implementation of Automatic Lawn CutterDocument6 pagesDesign and Implementation of Automatic Lawn CutterIJSTENo ratings yet
- Remote Controlled Screw Jack 2014 AcDocument58 pagesRemote Controlled Screw Jack 2014 AcChockalingam AthilingamNo ratings yet
- Scotch Yoke MechanismDocument37 pagesScotch Yoke MechanismSaravanan Viswakarma100% (1)
- Build Vertical Axis Wind TurbineDocument45 pagesBuild Vertical Axis Wind TurbineThaha Refaye0% (2)
- Brake Failure IndicatorDocument2 pagesBrake Failure Indicatorarun@1984No ratings yet
- Road Marking Materials and Application TechniquesDocument9 pagesRoad Marking Materials and Application TechniquesMalith De SilvaNo ratings yet
- 586-Automatic Transformer Heat Reduction SystemDocument4 pages586-Automatic Transformer Heat Reduction SystemAmit Mohapatra100% (1)
- Fabricate Hydraulic Dual Brake Single LeverDocument4 pagesFabricate Hydraulic Dual Brake Single LeversiddharthNo ratings yet
- Aqua Drone Ieee PaperDocument3 pagesAqua Drone Ieee PaperAkash ShahuNo ratings yet
- Cricket Bowling MachineDocument69 pagesCricket Bowling MachineTanvi KhuranaNo ratings yet
- Project Synopsis: Department of Mechanical Engineering Submitted byDocument10 pagesProject Synopsis: Department of Mechanical Engineering Submitted byMintu VermaNo ratings yet
- Auto Floor CleanerDocument32 pagesAuto Floor CleanerAnonymous L9fB0XUNo ratings yet
- A Major ProjectDocument27 pagesA Major ProjectJanak KishorNo ratings yet
- Pneumatic HacksawDocument6 pagesPneumatic HacksawAvinash Lad100% (1)
- Project Report On Pedal Operated Hack Saw MachineDocument42 pagesProject Report On Pedal Operated Hack Saw MachineNishithNo ratings yet
- Automatic Paper Cutting Using Geneva MechanismDocument4 pagesAutomatic Paper Cutting Using Geneva MechanismsankaramarayananNo ratings yet
- Powered Vegetable Cutting Machine RDocument36 pagesPowered Vegetable Cutting Machine RMubarak ShaikNo ratings yet
- Accident Alert in Modern Traffic System With CameraDocument12 pagesAccident Alert in Modern Traffic System With CameraLeander Lawrence100% (1)
- .Design & Fabrication of Automatic Drainage Cleaning System Using Solar Panel PDFDocument2 pages.Design & Fabrication of Automatic Drainage Cleaning System Using Solar Panel PDFJonesNo ratings yet
- Pneumatic Controlled Ramming HolderDocument50 pagesPneumatic Controlled Ramming Holderraghul92No ratings yet
- Motorized Ramming MachineDocument53 pagesMotorized Ramming Machineilayaraja6100% (1)
- Design and fabrication of multi-purpose sieving machineDocument6 pagesDesign and fabrication of multi-purpose sieving machineMICHEL RAJ MechNo ratings yet
- Automatic potato chips machine cuts potatoes easilyDocument3 pagesAutomatic potato chips machine cuts potatoes easilyVinodNKumarNo ratings yet
- Automated IrrigationDocument12 pagesAutomated IrrigationKarthik RaitaniNo ratings yet
- Intelligent Braking System - SynopsisDocument6 pagesIntelligent Braking System - SynopsisTanviNo ratings yet
- Electromagnetic Embossing MachineDocument12 pagesElectromagnetic Embossing Machinesubramanya1982No ratings yet
- Agro Sprayer ReportDocument43 pagesAgro Sprayer ReportSathishKumarNo ratings yet
- Modification of River Cleaning MachineDocument5 pagesModification of River Cleaning MachineIJRASETPublicationsNo ratings yet
- Project ReportDocument47 pagesProject ReportNitin VermaNo ratings yet
- Automatic Braking System for VehiclesDocument82 pagesAutomatic Braking System for Vehiclesbalabooks100% (1)
- Design and Fabrication of Stair Climbing CartDocument35 pagesDesign and Fabrication of Stair Climbing Cartduleep danielNo ratings yet
- Power Generation From Speed Breaker Using Crank ShaftDocument6 pagesPower Generation From Speed Breaker Using Crank ShaftIJARTESNo ratings yet
- Road Side Dust Cleaner PDFDocument5 pagesRoad Side Dust Cleaner PDFSURAJ NAGNo ratings yet
- Solar Grass Cutter ProjectDocument12 pagesSolar Grass Cutter ProjectDEEPAK CNo ratings yet
- Pedal-Powered Groundnut Sheller Design for Rural VillagesDocument37 pagesPedal-Powered Groundnut Sheller Design for Rural VillagesPankajDhobleNo ratings yet
- Pedal Powered Water PurifierDocument30 pagesPedal Powered Water PurifierAnuj TripathiNo ratings yet
- Button Operated Electromagnetic Gear ChangerDocument64 pagesButton Operated Electromagnetic Gear ChangermkkfakesNo ratings yet
- Literature Review: Automatic Pneumatic Bumper and Braking SystemDocument10 pagesLiterature Review: Automatic Pneumatic Bumper and Braking Systemkathir venkatachalamNo ratings yet
- Project Report - Docx 11111Document46 pagesProject Report - Docx 11111Narayan SutharNo ratings yet
- Pnumatic Ramming and Punching Machine ReportDocument28 pagesPnumatic Ramming and Punching Machine ReportSun SriNo ratings yet
- Brake Failure Indicator Design: Bachelor of TechnologyDocument19 pagesBrake Failure Indicator Design: Bachelor of TechnologyAniket KarmakarNo ratings yet
- Automatic Multi Purpose Agricultural Machine Using Solar EnergyDocument8 pagesAutomatic Multi Purpose Agricultural Machine Using Solar EnergyMechWindNaniNo ratings yet
- Automatic Brake Failure Detection and Emergency Braking SystemDocument66 pagesAutomatic Brake Failure Detection and Emergency Braking Systemrohith kuruvaNo ratings yet
- PNEUmatic Crane NewDocument26 pagesPNEUmatic Crane NewVignesh VaranNo ratings yet
- Automatic Clutch and Braking System ControlDocument23 pagesAutomatic Clutch and Braking System ControlStartechnico TechnocratsNo ratings yet
- Bottling Plant PLC 2019Document4 pagesBottling Plant PLC 2019Chockalingam AthilingamNo ratings yet
- Box Shift Conveyor 2018Document2 pagesBox Shift Conveyor 2018Chockalingam AthilingamNo ratings yet
- Mixer GrinderDocument29 pagesMixer GrinderChockalingam AthilingamNo ratings yet
- Scotch Yoke Hacksaw Sriram Engg ReportDocument67 pagesScotch Yoke Hacksaw Sriram Engg ReportChockalingam Athilingam100% (1)
- Project Titles NC 2018 Cs Fea RDDocument9 pagesProject Titles NC 2018 Cs Fea RDChockalingam AthilingamNo ratings yet
- 11 Foldable Bridge 2017 PrintDocument48 pages11 Foldable Bridge 2017 PrintChockalingam AthilingamNo ratings yet
- Project List With Cost Details 2018 2019 Panimalar PolyDocument8 pagesProject List With Cost Details 2018 2019 Panimalar PolyChockalingam AthilingamNo ratings yet
- Shock Absorber Failure 2018Document3 pagesShock Absorber Failure 2018Chockalingam AthilingamNo ratings yet
- Scotck Yoke PPT Veltech 2016Document29 pagesScotck Yoke PPT Veltech 2016Chockalingam Athilingam50% (2)
- Manual Bi Folding Gate PRINTCOPY SBDDocument50 pagesManual Bi Folding Gate PRINTCOPY SBDChockalingam AthilingamNo ratings yet
- Block Diagram of Carbon Level IndicatorDocument1 pageBlock Diagram of Carbon Level IndicatorChockalingam AthilingamNo ratings yet
- Gas Cutting DeviceDocument3 pagesGas Cutting DeviceChockalingam AthilingamNo ratings yet
- Plastic Injection Manual 2016 Amk PolyDocument43 pagesPlastic Injection Manual 2016 Amk PolyChockalingam AthilingamNo ratings yet
- 6.design and Fabrication of Length Adjustable Belt Conveyor-1Document3 pages6.design and Fabrication of Length Adjustable Belt Conveyor-1Chockalingam AthilingamNo ratings yet
- Safety For Motorised Sheet Forming 2018Document3 pagesSafety For Motorised Sheet Forming 2018Chockalingam AthilingamNo ratings yet
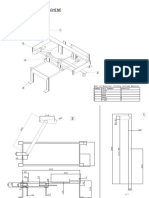
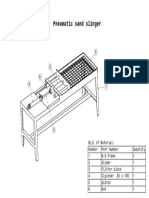
- Pneumatic Sand SlingerDocument1 pagePneumatic Sand SlingerChockalingam AthilingamNo ratings yet
- Lorry Trailor Lifter CostDocument1 pageLorry Trailor Lifter CostChockalingam AthilingamNo ratings yet
- Pneumatic Elevator Abs 20124Document3 pagesPneumatic Elevator Abs 20124Chockalingam AthilingamNo ratings yet
- Abs 127two - Axes - Drill 2016 ReviewDocument3 pagesAbs 127two - Axes - Drill 2016 ReviewChockalingam AthilingamNo ratings yet
- HTTP FOR ENGINEERINGDocument1 pageHTTP FOR ENGINEERINGChockalingam AthilingamNo ratings yet
- Electronic ComparatorDocument1 pageElectronic ComparatorChockalingam AthilingamNo ratings yet
- Air Brake PROJECT REPORTDocument52 pagesAir Brake PROJECT REPORTChockalingam Athilingam72% (18)
- Shell and Tube Heat Exchanger Design Using CFD ToolsDocument4 pagesShell and Tube Heat Exchanger Design Using CFD ToolsChockalingam AthilingamNo ratings yet
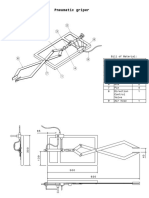
- Pneumatic GriperDocument2 pagesPneumatic GriperChockalingam AthilingamNo ratings yet
- MOTORISED Press Durga Poly 2016Document76 pagesMOTORISED Press Durga Poly 2016Chockalingam AthilingamNo ratings yet
- HonningDocument1 pageHonningChockalingam AthilingamNo ratings yet
- Amk SymbolDocument6 pagesAmk SymbolChockalingam AthilingamNo ratings yet
- IR Sensor UnitDocument1 pageIR Sensor UnitChockalingam AthilingamNo ratings yet
- F T ZL 6L: 4 - RLT TTJ R5 !.1Document1 pageF T ZL 6L: 4 - RLT TTJ R5 !.1Chockalingam AthilingamNo ratings yet
- Design and Fabrication of T Shirt Folding MachineDocument41 pagesDesign and Fabrication of T Shirt Folding MachineSubu ManiNo ratings yet
- Basic Electronics 2Document66 pagesBasic Electronics 2Sandhya DeviNo ratings yet
- Be Winter 2018Document2 pagesBe Winter 2018vikram patilNo ratings yet
- Root Category: # Free Space (1 Part(s) )Document1 pageRoot Category: # Free Space (1 Part(s) )MiguelNo ratings yet
- AD8232-EVALZ User Guide: Evaluating The Single-Lead Heart Rate Monitor Front EndDocument8 pagesAD8232-EVALZ User Guide: Evaluating The Single-Lead Heart Rate Monitor Front EndBorislav GanevNo ratings yet
- Aircraft Radio Communications ReceiverDocument2 pagesAircraft Radio Communications Receiverdreyes3773No ratings yet
- 1 PIC Evaluation Board User ManualDocument22 pages1 PIC Evaluation Board User ManualKavin Sengodan100% (1)
- Test Bank For Modern Electronic Communication 9th Edition Jeff Beasley DownloadDocument10 pagesTest Bank For Modern Electronic Communication 9th Edition Jeff Beasley DownloadStephanie Branch100% (25)
- J12-1000 A 07-3.1Document99 pagesJ12-1000 A 07-3.1SawonNo ratings yet
- Datasheet - HMS 1600 1800 2000 4T NA - EN - V202201Document2 pagesDatasheet - HMS 1600 1800 2000 4T NA - EN - V202201CEcii CaballeroNo ratings yet
- PLC01 Psu1 AI/O1: SiemensDocument1 pagePLC01 Psu1 AI/O1: SiemensSyachrial YusufNo ratings yet
- MIL-HDBK-217F Reliability Prediction For Electronic EquipmentDocument205 pagesMIL-HDBK-217F Reliability Prediction For Electronic Equipmentgeoffxyz0No ratings yet
- PIX-36 Catalogue Schneider 1Document46 pagesPIX-36 Catalogue Schneider 1ARYA JENANo ratings yet
- Columbs LawDocument6 pagesColumbs Lawasadaliawanatd1No ratings yet
- Lightning Protection SystemDocument19 pagesLightning Protection SystemKarthik MandyaNo ratings yet
- Diodes Applications GuideDocument39 pagesDiodes Applications GuideKartika Munir100% (1)
- DPR - IPDS Jammu - 30.4.2015Document82 pagesDPR - IPDS Jammu - 30.4.2015Manoj ManhasNo ratings yet
- List of IEC StandardDocument5 pagesList of IEC Standardtrantienhung227No ratings yet
- 2089 340065 Multimeter Mastech Ms8240cDocument11 pages2089 340065 Multimeter Mastech Ms8240cFrancisco Javier GuerraNo ratings yet
- LPX210M-V1 Aspx PDFDocument2 pagesLPX210M-V1 Aspx PDFLuis Alfonso Lopez Arroyabe0% (1)
- Magnetostriction MichelsonDocument6 pagesMagnetostriction MichelsonOktafiani Nurita SariNo ratings yet
- Group 3 Section (H) (Lab Report 2)Document8 pagesGroup 3 Section (H) (Lab Report 2)Shoaib KhanNo ratings yet
- Service Manual: ZS-SN10Document50 pagesService Manual: ZS-SN10boroda2410No ratings yet
- Power Transmission, Distribution and Utilization: Lecture# 13 &14: Underground CablesDocument29 pagesPower Transmission, Distribution and Utilization: Lecture# 13 &14: Underground CablesPhD EENo ratings yet
- Toyota Camry IgDocument56 pagesToyota Camry IgKulasekaran Amirthalingam100% (1)
- ABB ACS 1000 Tech Catalog RevDDocument161 pagesABB ACS 1000 Tech Catalog RevDElena Koneva50% (2)
- BTVACAHOCEG2FCN01B Datasheet GP10012FF DatasheetDocument3 pagesBTVACAHOCEG2FCN01B Datasheet GP10012FF DatasheetAnton TonchevNo ratings yet
- Shunt Reactors: Cost Efficiency in Power TransmissionDocument20 pagesShunt Reactors: Cost Efficiency in Power TransmissionSneha ShendgeNo ratings yet
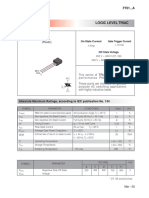
- LOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSDocument4 pagesLOGIC LEVEL TRIAC TECHNICAL SPECIFICATIONSAnatoly WolkoffNo ratings yet
- Motor StartingDocument24 pagesMotor Startingeng_mahmoud3000100% (1)