You might also like
- Linear and Integer Programming 1 PDFDocument160 pagesLinear and Integer Programming 1 PDFHammad Arshad QadriNo ratings yet
- Midterm Exam - Attempt Review 1Document15 pagesMidterm Exam - Attempt Review 1Erick GarciaNo ratings yet
- G-8 3rd Summative TestDocument2 pagesG-8 3rd Summative TestJulius Agacid BangeroNo ratings yet
- Introduction to Differential Calculus: Systematic Studies with Engineering Applications for BeginnersFrom EverandIntroduction to Differential Calculus: Systematic Studies with Engineering Applications for BeginnersRating: 2 out of 5 stars2/5 (1)
- ANSI B16.9 ElbowDocument3 pagesANSI B16.9 ElbowMahmoud Reda ElSherifNo ratings yet
- MSC Lecture 6Document28 pagesMSC Lecture 6Chán Chênh VênhNo ratings yet
- Wavefunctions and Probability DensitiesDocument6 pagesWavefunctions and Probability Densities張湧浩100% (1)
- Engineering Mathematics II Assignment 1 SEM 2 20172018Document3 pagesEngineering Mathematics II Assignment 1 SEM 2 20172018Muniamah MuniNo ratings yet
- Chapter 13 Non Linear SimulationsDocument21 pagesChapter 13 Non Linear SimulationsjosephNo ratings yet
- Chapter 13Document21 pagesChapter 13mafevi90No ratings yet
- Ansys Chapter 13Document22 pagesAnsys Chapter 13Tran Van TienNo ratings yet
- Chapter 13 Nonlinear Simulations 1Document21 pagesChapter 13 Nonlinear Simulations 1Sony JsdNo ratings yet
- Simulation and Arduino Hardware Implementation of DC Motor Control Using Sliding Mode ControllerDocument6 pagesSimulation and Arduino Hardware Implementation of DC Motor Control Using Sliding Mode Controllermiftah fadhliNo ratings yet
- PLC Excercises Using Ladder DiagramDocument27 pagesPLC Excercises Using Ladder DiagramToheebNo ratings yet
- Performance Fuzzy PDFDocument4 pagesPerformance Fuzzy PDFabdelgoui rymNo ratings yet
- Finalized ProjectDocument23 pagesFinalized ProjectyoniNo ratings yet
- Continuous to Discrete Conversion MethodsDocument12 pagesContinuous to Discrete Conversion Methodsorg25grNo ratings yet
- Digital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341Document39 pagesDigital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341محمد القدوميNo ratings yet
- Lecture9 - Fixed PointDocument36 pagesLecture9 - Fixed PointTu BeeNo ratings yet
- Lecture 7 - Numerical Control - CH 7Document25 pagesLecture 7 - Numerical Control - CH 7RaghuNo ratings yet
- EE 461 Experiment #1 Digital Control of DC Servomotor: 1 ObjectivesDocument5 pagesEE 461 Experiment #1 Digital Control of DC Servomotor: 1 ObjectivesTancho IndraNo ratings yet
- ME 4451 Lab 1Document7 pagesME 4451 Lab 1ImaneNo ratings yet
- Applicable Artificial Intelligence Back Propagation: Academic Session 2022/2023Document20 pagesApplicable Artificial Intelligence Back Propagation: Academic Session 2022/2023muhammed suhailNo ratings yet
- Presentation 11Document40 pagesPresentation 11Anam ShoaibNo ratings yet
- ME 7292 Control System Labs: Spring 2014Document10 pagesME 7292 Control System Labs: Spring 2014Kirti Deo MishraNo ratings yet
- Statistic and ProbabilityDocument16 pagesStatistic and ProbabilitybotakezuNo ratings yet
- CNC Machine (Case Study)Document25 pagesCNC Machine (Case Study)Mohamed HamdyNo ratings yet
- Computer Architecture - tutorial 2 TUTOR COPYDocument5 pagesComputer Architecture - tutorial 2 TUTOR COPYHalim KorogluNo ratings yet
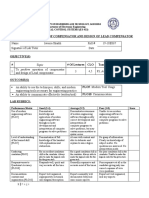
- LAB # 13: Operation of Compensator and Design of Lead CompensatorDocument17 pagesLAB # 13: Operation of Compensator and Design of Lead CompensatorJaveria ShaikhNo ratings yet
- Motion Manipulation TechniquesDocument18 pagesMotion Manipulation TechniquesVignesh WaranNo ratings yet
- Intro ECSDocument12 pagesIntro ECSAbdul Hadi MustafaNo ratings yet
- Lab 1 Introduction and Top-SPICE DemoDocument10 pagesLab 1 Introduction and Top-SPICE Demochrisdp23No ratings yet
- 11 Mrs. Sadia Patka Dda Line Drawing AlgorithmDocument21 pages11 Mrs. Sadia Patka Dda Line Drawing Algorithmsova jettoNo ratings yet
- V200 Quick GuideDocument46 pagesV200 Quick Guidesathish98No ratings yet
- MSDFFDocument20 pagesMSDFFShweta KumariNo ratings yet
- DC Motor Position Digital Controller DesignDocument15 pagesDC Motor Position Digital Controller DesignuyuniNo ratings yet
- Digital Signal Processing: Laboratory ManualDocument101 pagesDigital Signal Processing: Laboratory ManualGopinath B L NaiduNo ratings yet
- Instruction Manual Fk50Document5 pagesInstruction Manual Fk50projectpg projectpgNo ratings yet
- E4-05 - Applied InstructionsDocument19 pagesE4-05 - Applied InstructionsLê Hiếu TìnhNo ratings yet
- MANU2518 - Assignment 1Document14 pagesMANU2518 - Assignment 1huyle972000No ratings yet
- Solar Tracking System: EE213 Electical Circuits Laboratory Term ProjectDocument17 pagesSolar Tracking System: EE213 Electical Circuits Laboratory Term ProjectEren TurgutNo ratings yet
- LCS Lab Report AnalysisDocument43 pagesLCS Lab Report Analysismeseret sisayNo ratings yet
- Per FlabDocument7 pagesPer FlabYoldaş KarabulutNo ratings yet
- (MIT) Strength Reduction of Integer Division and Modulo OperationsDocument17 pages(MIT) Strength Reduction of Integer Division and Modulo OperationsaamirjvmNo ratings yet
- Expt 1 Pre-Lab - Intro To SIMetrixDocument4 pagesExpt 1 Pre-Lab - Intro To SIMetrixCarlo JimenezNo ratings yet
- EE Lab Manuls Fast NuDocument70 pagesEE Lab Manuls Fast NuMuhammad SaadNo ratings yet
- MATH 251-02 Fall 22, Sept 6th Calculus Quadratic SurfacesDocument11 pagesMATH 251-02 Fall 22, Sept 6th Calculus Quadratic SurfacesNaresh SehdevNo ratings yet
- 4 - FeatureCam Basic Turning 2 Days 2013Document172 pages4 - FeatureCam Basic Turning 2 Days 2013anibal.oscarNo ratings yet
- Module 3 - Data Flow ModellingDocument12 pagesModule 3 - Data Flow ModellingYvanne Esquia CuregNo ratings yet
- Scilab Ninja: Module 6: Discrete-Time Control SystemsDocument8 pagesScilab Ninja: Module 6: Discrete-Time Control Systemsorg25grNo ratings yet
- Root Locus Design of DC Motor Position ControlDocument16 pagesRoot Locus Design of DC Motor Position ControlFahim Faysal KhanNo ratings yet
- Digital Controller Design MethodsDocument43 pagesDigital Controller Design MethodsArif HassanNo ratings yet
- Lecture 12 Spatial InterpolationDocument55 pagesLecture 12 Spatial InterpolationprakashNo ratings yet
- Steady-State Operation of Buck DC-DC Converter Lab ReportDocument13 pagesSteady-State Operation of Buck DC-DC Converter Lab Reportسجاد عباسNo ratings yet
- Unicycle RobotDocument45 pagesUnicycle RobotSAN JUAN BAUTISTANo ratings yet
- Basic2 Mechanical VibrationsDocument4 pagesBasic2 Mechanical VibrationsjeisonNo ratings yet
- Chapter 2Document22 pagesChapter 2bekemaNo ratings yet
- CAQA5e ch3Document45 pagesCAQA5e ch3Jameem AhamedNo ratings yet
- Arithematic For Floating PointsDocument2 pagesArithematic For Floating PointsghanNo ratings yet
- CS Smart Syllabus 2nd Year Loop ConstructsDocument3 pagesCS Smart Syllabus 2nd Year Loop ConstructsMoin YaqoobNo ratings yet
- Mohamoud Project Final ReportDocument12 pagesMohamoud Project Final ReportVIJAYA LAXMINo ratings yet
- Ade Exp 8Document6 pagesAde Exp 8Bhuvan BeeraNo ratings yet
- Lec18-Static BRANCH PREDICTION VLIWDocument40 pagesLec18-Static BRANCH PREDICTION VLIWi_2loveu3235No ratings yet
- enDocument2 pagesenMahmoud Reda ElSherifNo ratings yet
- Cap08 PDFDocument47 pagesCap08 PDFMahmoud Reda ElSherifNo ratings yet
- Selection of Main Dimensions and Calculation of Basic Ship Design ValuesDocument11 pagesSelection of Main Dimensions and Calculation of Basic Ship Design Valuesshyroro2010No ratings yet
- 2 6Document4 pages2 6Mahmoud Reda ElSherifNo ratings yet
- Chapter 11 Modal Analysis 1Document14 pagesChapter 11 Modal Analysis 1Pooja MonaNo ratings yet
- Evaluation of Cross Curves of Fishing Vessels at The Preliminary Design StageDocument12 pagesEvaluation of Cross Curves of Fishing Vessels at The Preliminary Design StageMahmoud Reda ElSherif100% (1)
- Fundamentals of DraftingDocument21 pagesFundamentals of Draftingric_napigkitNo ratings yet
- Chapter 03Document23 pagesChapter 03Gail BrownNo ratings yet
- Alecture14 Paik2Document93 pagesAlecture14 Paik2Mahmoud Reda ElSherifNo ratings yet
- Control of Diesel Engines PDFDocument19 pagesControl of Diesel Engines PDFMahmoud Reda ElSherifNo ratings yet
- Chapter14 PDFDocument24 pagesChapter14 PDFMahmoud Reda ElSherifNo ratings yet
- Chapter12 PDFDocument24 pagesChapter12 PDFMahmoud Reda ElSherifNo ratings yet
- Chapter 02 Ansys TUTORIALDocument22 pagesChapter 02 Ansys TUTORIALMathengeNderituNo ratings yet
- Chapter10 PDFDocument9 pagesChapter10 PDFMahmoud Reda ElSherifNo ratings yet
- Chapter 01Document37 pagesChapter 01Thyago de LellysNo ratings yet
- Chapter15 PDFDocument11 pagesChapter15 PDFMahmoud Reda ElSherifNo ratings yet
- Chapter08 PDFDocument5 pagesChapter08 PDFMahmoud Reda ElSherifNo ratings yet
- Chapter 01Document37 pagesChapter 01Thyago de LellysNo ratings yet
- Chapter 09Document12 pagesChapter 09tareqkh1No ratings yet
- Chapter15 PDFDocument11 pagesChapter15 PDFMahmoud Reda ElSherifNo ratings yet
- Ansys12 Workbench Tutorial Lab2 UpdatedDocument9 pagesAnsys12 Workbench Tutorial Lab2 UpdatedOla AzmyNo ratings yet
- Chapter 4 3D Solid Modeling 1Document18 pagesChapter 4 3D Solid Modeling 1Shaheen S. RatnaniNo ratings yet
- Chapter 07Document8 pagesChapter 07Krause SpencerNo ratings yet
- Chapter06 PDFDocument8 pagesChapter06 PDFMahmoud Reda ElSherifNo ratings yet
- Chapter05 PDFDocument12 pagesChapter05 PDFMahmoud Reda ElSherifNo ratings yet
- BoundaryConditions CAEA PDFDocument28 pagesBoundaryConditions CAEA PDFMahmoud Reda ElSherifNo ratings yet
- NACA Airfoil SeriesDocument6 pagesNACA Airfoil SeriesMohammad Taha IrfanNo ratings yet
- Planes Defining a Triangular PrismDocument9 pagesPlanes Defining a Triangular PrismSurya PappuNo ratings yet
- 0.3 Functions and Graphs Contemporary Calculus 1Document12 pages0.3 Functions and Graphs Contemporary Calculus 1benalyn ignacioNo ratings yet
- EXERCISE 2. Solve The Following Problems Using Regula-Falsi Method and Show The GraphDocument5 pagesEXERCISE 2. Solve The Following Problems Using Regula-Falsi Method and Show The GraphFarizza Ann KiseoNo ratings yet
- Computer Application in ChEDocument5 pagesComputer Application in ChEArrianne Jaye MataNo ratings yet
- 1st Periodical Exam - General MathematicsDocument5 pages1st Periodical Exam - General MathematicsLORENZO RAMIREZNo ratings yet
- Tensor Algebra FormulasDocument3 pagesTensor Algebra FormulasSilent KnightNo ratings yet
- Numerical Methods in Civil Engg-Janusz ORKISZ PDFDocument154 pagesNumerical Methods in Civil Engg-Janusz ORKISZ PDFRajesh CivilNo ratings yet
- Inequalities and Linear ProgrammingDocument31 pagesInequalities and Linear ProgrammingEndah Nawang WulanNo ratings yet
- Exponential Equations LPDocument2 pagesExponential Equations LPBrian MaryNo ratings yet
- Response SpectrukmDocument24 pagesResponse SpectrukmpreranagannaNo ratings yet
- Bra Ket & Linear AlgebraDocument4 pagesBra Ket & Linear AlgebracrguntalilibNo ratings yet
- Finite Element Formulation for Stiffened Shell StructuresDocument42 pagesFinite Element Formulation for Stiffened Shell StructuresHaitham AyyadNo ratings yet
- Set TheoryDocument20 pagesSet TheoryAbdulmejidAyalewNo ratings yet
- Table of Common Laplace TransformsDocument2 pagesTable of Common Laplace TransformsJohn Carlo SacramentoNo ratings yet
- Ma034 RPDocument9 pagesMa034 RPkamal kannanNo ratings yet
- Lanczos Method Seminar For Eigenvalue Reading Group: Andre LegerDocument4 pagesLanczos Method Seminar For Eigenvalue Reading Group: Andre LegerDhinakaran VeemanNo ratings yet
- Problem 1.4Document3 pagesProblem 1.4abc xyzNo ratings yet
- C4L2 Bisection MethodsDocument25 pagesC4L2 Bisection MethodsZakwan HanifNo ratings yet
- Fowles 11Document29 pagesFowles 11jjmaldonisNo ratings yet
- BSM Unit-2 Questions & SolutionsDocument7 pagesBSM Unit-2 Questions & SolutionsSuragiri VarshiniNo ratings yet
- Introduction To Finite Element MethodDocument16 pagesIntroduction To Finite Element MethodSri Rama ChandNo ratings yet
- Example 3Document8 pagesExample 3AlexanderNCNo ratings yet
- 13 Analisis Riwayat WaktuDocument9 pages13 Analisis Riwayat WaktuNabila Aisyah RomadhonaNo ratings yet
- 355 - EC6403 Electromagnetic Fields - Anna University 2013 Regulation SyllabusDocument2 pages355 - EC6403 Electromagnetic Fields - Anna University 2013 Regulation SyllabusArun GiriNo ratings yet
- Linear Equations in 2 Variables Worksheet 3Document1 pageLinear Equations in 2 Variables Worksheet 3PRATHIKSHANo ratings yet
- 1-6 Study Guide and InterventionDocument2 pages1-6 Study Guide and InterventionAbdullah MalikNo ratings yet