You might also like
- ESS101-Modeling and Simulation: Paolo FalconeDocument24 pagesESS101-Modeling and Simulation: Paolo FalconeElvir PecoNo ratings yet
- Ece2610 Chap9Document24 pagesEce2610 Chap9Bayar JargalNo ratings yet
- MIT6 003F11 F09final SolDocument16 pagesMIT6 003F11 F09final SolabdullahNo ratings yet
- Lecture VIII: Fourier Series: Maxim RaginskyDocument20 pagesLecture VIII: Fourier Series: Maxim RaginskyShakil Safin OrthoNo ratings yet
- Tutorial On Control Theory: Stefan Simrock, ITERDocument95 pagesTutorial On Control Theory: Stefan Simrock, ITERAleksandar KošaracNo ratings yet
- Filtering and Identification: Lecture 3: Stochastic Least Squares Square Root EstimationDocument45 pagesFiltering and Identification: Lecture 3: Stochastic Least Squares Square Root Estimationaapbanaan2No ratings yet
- Digital Signal ProcessingDocument22 pagesDigital Signal Processingtdhinakaran100% (1)
- DSP Qs 2marksDocument36 pagesDSP Qs 2marksanon_624151290No ratings yet
- Ni Two Marks - NewDocument37 pagesNi Two Marks - NewAnuishuya SugumaranNo ratings yet
- 2006 2 PDFDocument6 pages2006 2 PDFGodofredoNo ratings yet
- Matched FilterDocument15 pagesMatched FilterjMcLean99No ratings yet
- 2-Mark Questions Anna University Signals and SystemsDocument11 pages2-Mark Questions Anna University Signals and SystemsSonu100% (2)
- Digital Signal Processing: 2 Marks & Question-AnswersDocument30 pagesDigital Signal Processing: 2 Marks & Question-AnswerssridharanchandranNo ratings yet
- Signals and Systems: Lecture NotesDocument107 pagesSignals and Systems: Lecture Notesb7qxnnm8mzNo ratings yet
- Ece 3084 Su 14 HW 04Document5 pagesEce 3084 Su 14 HW 04Jay Mehta0% (1)
- Signals-and-Systems - Basics & Formula HandbookDocument19 pagesSignals-and-Systems - Basics & Formula HandbookKALAIMATHI100% (15)
- SGFilter - A Stand-Alone Implementation of The Savitzky-Golay Smoothing FilterDocument42 pagesSGFilter - A Stand-Alone Implementation of The Savitzky-Golay Smoothing FilterFredrik JonssonNo ratings yet
- Discrete-Time Linear Systems: Automatic Control 1Document32 pagesDiscrete-Time Linear Systems: Automatic Control 1Anonymous L7XrxpeI1zNo ratings yet
- EC6303Document5 pagesEC6303Engr Umar AshrafNo ratings yet
- EC2204QBDocument16 pagesEC2204QBSridhar RamanNo ratings yet
- Unit 1 SS QaDocument28 pagesUnit 1 SS QaSany StarNo ratings yet
- Tutorial KFDocument13 pagesTutorial KFkidusNo ratings yet
- 16.36 Communication Systems Engineering: Mit OpencoursewareDocument16 pages16.36 Communication Systems Engineering: Mit OpencoursewaretechgeekNo ratings yet
- Autocorrelation LTI SystemDocument12 pagesAutocorrelation LTI Systemmadsud69No ratings yet
- Unit 1Document69 pagesUnit 1SivaKumar AnandanNo ratings yet
- 218 - EC8352, EC6303 Signals and Systems - 2 Marks With Answers 2Document26 pages218 - EC8352, EC6303 Signals and Systems - 2 Marks With Answers 2anakn803No ratings yet
- Ece IV Signals & Systems (10ec44) SolutionDocument54 pagesEce IV Signals & Systems (10ec44) SolutionJoseph Bezos Musk100% (2)
- Periodic Signals: 1. Application GoalDocument10 pagesPeriodic Signals: 1. Application GoalGabi MaziluNo ratings yet
- Gaussian and White Random Processes: y X Xy XX Yy XXDocument4 pagesGaussian and White Random Processes: y X Xy XX Yy XXArin KudlacekNo ratings yet
- 1 Beamer Focs Part1Document117 pages1 Beamer Focs Part1Barış EzerceliNo ratings yet
- EC6303 Signals and Systems Two Marks For Ece 2013 - 2013 - RegulationDocument15 pagesEC6303 Signals and Systems Two Marks For Ece 2013 - 2013 - RegulationSankar KumarNo ratings yet
- Lecture 04 - Signal Space Approach and Gram Schmidt ProcedureDocument20 pagesLecture 04 - Signal Space Approach and Gram Schmidt ProcedureKhoa PhamNo ratings yet
- Control The World by Adding and Multiplying: Andres KwasinskiDocument52 pagesControl The World by Adding and Multiplying: Andres Kwasinskiajeer_crlNo ratings yet
- Set 2Document3 pagesSet 2Dr. Finto RaphelNo ratings yet
- 2 Complex Signals and Radios Short 2ppDocument32 pages2 Complex Signals and Radios Short 2pphungpm2013No ratings yet
- 1 Introduction & Objective: Lab 15: Fourier SeriesDocument9 pages1 Introduction & Objective: Lab 15: Fourier SeriesaliNo ratings yet
- Experiment No:-1: AIM: - Apparatus: - TheoryDocument5 pagesExperiment No:-1: AIM: - Apparatus: - Theorydeepesh chhetriNo ratings yet
- Discrete Fourier Transform in Excel TutorialDocument10 pagesDiscrete Fourier Transform in Excel TutorialNumXL ProNo ratings yet
- Ss QuetionsDocument7 pagesSs QuetionsSalai Kishwar JahanNo ratings yet
- Digital Signal Processing Question Bank 01Document37 pagesDigital Signal Processing Question Bank 01Mathi YuvarajanNo ratings yet
- Signals and SystemsDocument22 pagesSignals and Systemsvnrao61No ratings yet
- Nonlinear SystemsDocument37 pagesNonlinear Systemssmriti_hunny5969No ratings yet
- DSP QB Updated - NewDocument7 pagesDSP QB Updated - NewthenithyanagrajNo ratings yet
- ELE 301: Signals and Systems: Prof. Paul CuffDocument45 pagesELE 301: Signals and Systems: Prof. Paul CuffTe NgNo ratings yet
- Lagrange Remainder Taylor FormDocument8 pagesLagrange Remainder Taylor FormsafarioreNo ratings yet
- Signal Processing First Lecture Objectives: Review: Digital Filtering of Analog SignalsDocument8 pagesSignal Processing First Lecture Objectives: Review: Digital Filtering of Analog SignalsHasan Hatice IlcalıNo ratings yet
- RepositoryDocument17 pagesRepositoryarefinhasib07No ratings yet
- C017 LinearizationDelaySystems CESA96 Lille SCANDocument6 pagesC017 LinearizationDelaySystems CESA96 Lille SCANCostanzo ManesNo ratings yet
- A Mathematical Approach of Fractional-Order Systems: Costandin Marius-SimionDocument4 pagesA Mathematical Approach of Fractional-Order Systems: Costandin Marius-SimionMOKANSNo ratings yet
- All Ss 5 - AssignDocument30 pagesAll Ss 5 - AssignBruce ArnoldNo ratings yet
- State Estimation Using Shifted Legendre Polynomials: B.M.Mohan, Senior Member IEEE Sanjeeb Kumar Kar, Student Member IEEEDocument6 pagesState Estimation Using Shifted Legendre Polynomials: B.M.Mohan, Senior Member IEEE Sanjeeb Kumar Kar, Student Member IEEErodlnf1No ratings yet
- Introduction To Reliability Theory (Part 2) : Frank CoolenDocument21 pagesIntroduction To Reliability Theory (Part 2) : Frank CoolenRuth SandalaNo ratings yet
- Kalman Filter PresentationDocument31 pagesKalman Filter Presentationalsonlee1111No ratings yet
- Kalman Filter ShoudongDocument7 pagesKalman Filter Shoudongteju1996cool100% (1)
- CE324 Taylor SeriesDocument7 pagesCE324 Taylor SeriesKirstin AwitenNo ratings yet
- Ss Important QuestionsDocument21 pagesSs Important QuestionsVeera ChaitanyaNo ratings yet
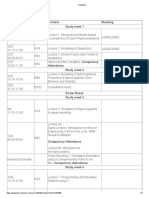
- Schedule - Content - SSY190 Inbyggda Styrsystem V18 (PING PONG) PDFDocument3 pagesSchedule - Content - SSY190 Inbyggda Styrsystem V18 (PING PONG) PDFElvir PecoNo ratings yet
- Assignment 2 Continuum Mechanics (4MT317) 2019: J J J J JDocument3 pagesAssignment 2 Continuum Mechanics (4MT317) 2019: J J J J JElvir PecoNo ratings yet
- 2014 ExercisesDocument8 pages2014 ExercisesElvir PecoNo ratings yet
- National Advisory Committee For AeronauticsDocument49 pagesNational Advisory Committee For AeronauticsElvir PecoNo ratings yet
- Engtrig ReviewerDocument23 pagesEngtrig ReviewerJason EspañolaNo ratings yet
- Exam 2 Review Sol PDFDocument13 pagesExam 2 Review Sol PDFkanurNo ratings yet
- Balaji Opt Lecture8 ActDocument72 pagesBalaji Opt Lecture8 ActHalwa KhoiriNo ratings yet
- Carrell J - Groups, Matrices, and Vector SpacesDocument414 pagesCarrell J - Groups, Matrices, and Vector SpacesWichi100% (3)
- Advanced Mechanics of MaterialsDocument58 pagesAdvanced Mechanics of MaterialsRino Nelson0% (1)
- X y Z X: (Solution Is On Next Page)Document3 pagesX y Z X: (Solution Is On Next Page)bc200415392 ASAD ASLAMNo ratings yet
- Heat EquationDocument124 pagesHeat Equationmario.sergionjr4394No ratings yet
- Printable Week 1 SlidesDocument16 pagesPrintable Week 1 SlidesSpencer gamingNo ratings yet
- Corrected Maths TestDocument2 pagesCorrected Maths TestTan Jiann MengNo ratings yet
- Physics 5300, Theoretical Mechanics Spring 2015Document4 pagesPhysics 5300, Theoretical Mechanics Spring 2015Ivandra LatumakulitaNo ratings yet
- Complemento Uchile (Semigrupos)Document18 pagesComplemento Uchile (Semigrupos)robertoNo ratings yet
- SpythDocument5 pagesSpytherick_zone25_8061871No ratings yet
- Chapter 7 Binomial, Normal, and Poisson DistributionsDocument2 pagesChapter 7 Binomial, Normal, and Poisson Distributionsdestu aryantoNo ratings yet
- Assignment 1Document1 pageAssignment 1Sherman ChuiNo ratings yet
- Math IecepDocument10 pagesMath IecepDenaiya Watton Leeh100% (2)
- MME SyllabusDocument4 pagesMME SyllabusUjjwal Raj SinghNo ratings yet
- Matematik Tingkatan 5 KntrakDocument3 pagesMatematik Tingkatan 5 KntrakmusyimusyimNo ratings yet
- Intro To PCADocument48 pagesIntro To PCAavant_ganjiNo ratings yet
- Self Weight Deflection of Circular PlatesDocument8 pagesSelf Weight Deflection of Circular PlatesJay KumarNo ratings yet
- Ugc Net Commerce: Business Statistics & ResearchDocument101 pagesUgc Net Commerce: Business Statistics & ResearchParth TiwariNo ratings yet
- Analiza DiscriminantaDocument3 pagesAnaliza DiscriminantaBodnaras AdrianNo ratings yet
- Lectures 20 and 21: Quantum Mechanics in 3D and Central PotentialsDocument13 pagesLectures 20 and 21: Quantum Mechanics in 3D and Central PotentialsJefersonNo ratings yet
- Pre-Calculus Math 40s Standards Test - Perms and CombsDocument13 pagesPre-Calculus Math 40s Standards Test - Perms and CombsJeremy BaziwNo ratings yet
- TheParabolicTrigonometry Els-UltDocument15 pagesTheParabolicTrigonometry Els-UltBinomialNo ratings yet
- Assignment 1Document12 pagesAssignment 1Christ LeeNo ratings yet
- Trumpeter Mock AIMEDocument6 pagesTrumpeter Mock AIMEgauss202No ratings yet
- FEM BasicDocument70 pagesFEM Basicformech100% (1)
- Calculus Modern Geometry Prelim Exam-09-O8-2022Document3 pagesCalculus Modern Geometry Prelim Exam-09-O8-2022Joseph EspedesNo ratings yet
- HW2011 2 ch11Document3 pagesHW2011 2 ch11Yoon Jae HyunNo ratings yet
- Chapter 3, CFD TheoryDocument32 pagesChapter 3, CFD TheoryAnil Frivolous AbstemiousNo ratings yet