You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Radio Shack Pro-94Document76 pagesRadio Shack Pro-94CharliebrownBrownNo ratings yet
- Collins WX RadarDocument222 pagesCollins WX RadarRaghav Chandra100% (1)
- 5G Physical Layer PDFDocument312 pages5G Physical Layer PDFJurassiclark100% (4)
- Description: Huawei 3G To 4G ReselectionDocument2 pagesDescription: Huawei 3G To 4G Reselectioninfo vistaNo ratings yet
- AntennaDocument9 pagesAntennaEjay Bildan80% (5)
- Application Notes Power DividersDocument5 pagesApplication Notes Power DividersMinh VuNo ratings yet
- Demonstration of A Switched Resonator Concept in A Dual-Band Monolithic CMOS LC-nned VCODocument4 pagesDemonstration of A Switched Resonator Concept in A Dual-Band Monolithic CMOS LC-nned VCOJeong-geun KimNo ratings yet
- Switching Scheme For A FMCW-MIMO Radar On A Moving PlatformDocument4 pagesSwitching Scheme For A FMCW-MIMO Radar On A Moving PlatformJeong-geun KimNo ratings yet
- A Low Phase-Noise Vco For Multi-Band Transceiver Using Fully Packaged Mems Electrostatic VaractorsDocument4 pagesA Low Phase-Noise Vco For Multi-Band Transceiver Using Fully Packaged Mems Electrostatic VaractorsJeong-geun KimNo ratings yet
- Dual-Band Quadrature Voltage-Controlled Oscillator Using Differential Inner-Diamond-Structure Switchable InductorDocument8 pagesDual-Band Quadrature Voltage-Controlled Oscillator Using Differential Inner-Diamond-Structure Switchable InductorJeong-geun KimNo ratings yet
- Cmos 45 GHZ Vector Modulator With Gain/ Phase Correction Through CalibrationDocument2 pagesCmos 45 GHZ Vector Modulator With Gain/ Phase Correction Through CalibrationJeong-geun KimNo ratings yet
- Compact Quasi-Yagi Antenna With Short Length Microstrip-To-Coplanar Stripline TransitionDocument3 pagesCompact Quasi-Yagi Antenna With Short Length Microstrip-To-Coplanar Stripline TransitionJeong-geun KimNo ratings yet
- Switching Scheme For A FMCW-MIMO Radar On A Moving PlatformDocument4 pagesSwitching Scheme For A FMCW-MIMO Radar On A Moving PlatformJeong-geun KimNo ratings yet
- A Compact X-Band Bi-Directional Phased-Array T/R Chipset in 0.13 M CMOS TechnologyDocument8 pagesA Compact X-Band Bi-Directional Phased-Array T/R Chipset in 0.13 M CMOS TechnologyJeong-geun KimNo ratings yet
- Analysis and Design of A Transformer-Feedback-Based Wideband ReceiverDocument12 pagesAnalysis and Design of A Transformer-Feedback-Based Wideband ReceiverJeong-geun KimNo ratings yet
- Cancellation of Unwanted Doppler Radar Sensor Motion Using Empirical Mode DecompositionDocument8 pagesCancellation of Unwanted Doppler Radar Sensor Motion Using Empirical Mode DecompositionJeong-geun KimNo ratings yet
- Aperture Coupled UWB Microstrip Patch Antenna Array For Mm-Wave Chipless RFID Tag ReaderDocument4 pagesAperture Coupled UWB Microstrip Patch Antenna Array For Mm-Wave Chipless RFID Tag ReaderJeong-geun KimNo ratings yet
- A 77 GHZ Cmos Low Noise Amplifier For Automotive Radar ReceiverDocument3 pagesA 77 GHZ Cmos Low Noise Amplifier For Automotive Radar ReceiverJeong-geun KimNo ratings yet
- A Highly Modular LTCC Packaging Technology For Ka-Band Satellite SystemsDocument5 pagesA Highly Modular LTCC Packaging Technology For Ka-Band Satellite SystemsJeong-geun KimNo ratings yet
- Dual-Band Unequal-Power Quadrature Branch-Line Coupler With Coupled LinesDocument3 pagesDual-Band Unequal-Power Quadrature Branch-Line Coupler With Coupled LinesJeong-geun KimNo ratings yet
- Tunable Broadband MMIC Active Directional Coupler: Byul Hur, Member, IEEE, and William R. Eisenstadt, Senior Member, IEEEDocument9 pagesTunable Broadband MMIC Active Directional Coupler: Byul Hur, Member, IEEE, and William R. Eisenstadt, Senior Member, IEEEJeong-geun KimNo ratings yet
- TRX Stacked Microstrip Patch Antenna With High IsolationDocument3 pagesTRX Stacked Microstrip Patch Antenna With High IsolationJeong-geun KimNo ratings yet
- A Push-Pull Class-C CMOS VCO: Andrea Mazzanti, Member, IEEE, and Pietro Andreani, Senior Member, IEEEDocument9 pagesA Push-Pull Class-C CMOS VCO: Andrea Mazzanti, Member, IEEE, and Pietro Andreani, Senior Member, IEEEJeong-geun KimNo ratings yet
- Millimeter-Wave Electronically Steerable Integrated Lens Antennas For WLAN/WPAN ApplicationsDocument7 pagesMillimeter-Wave Electronically Steerable Integrated Lens Antennas For WLAN/WPAN ApplicationsJeong-geun KimNo ratings yet
- Compact Sige HBT Low Noise Amplifiers For 3.1-10.6 GHZ Ultra-Wideband ApplicationsDocument4 pagesCompact Sige HBT Low Noise Amplifiers For 3.1-10.6 GHZ Ultra-Wideband ApplicationsJeong-geun KimNo ratings yet
- Bonding Wire Loop Antenna in Standard Ball Grid Array Package For 60-Ghz Short-Range Wireless CommunicationDocument7 pagesBonding Wire Loop Antenna in Standard Ball Grid Array Package For 60-Ghz Short-Range Wireless CommunicationJeong-geun KimNo ratings yet
- Advanced Reliable Systems (ARES) Lab. Department of Electrical Engineering National Central University Taoyuan, TaiwanDocument12 pagesAdvanced Reliable Systems (ARES) Lab. Department of Electrical Engineering National Central University Taoyuan, TaiwanJeong-geun KimNo ratings yet
- Spra 605Document23 pagesSpra 605Jeong-geun KimNo ratings yet
- ADRF5020Document13 pagesADRF5020Jeong-geun KimNo ratings yet
- 60-Ghz LTCC Helical Antenna: Changrong Liu, Yong-Xin Guo, Shao-Qiu XiaoDocument3 pages60-Ghz LTCC Helical Antenna: Changrong Liu, Yong-Xin Guo, Shao-Qiu XiaoJeong-geun KimNo ratings yet
- Schematic1 - Page1Document1 pageSchematic1 - Page1Jeong-geun Kim100% (1)
- FarField Method - With AuthorsDocument4 pagesFarField Method - With AuthorsFety AyuNo ratings yet
- Wireless Ad Hoc and Sensor Networks: Week 1Document2 pagesWireless Ad Hoc and Sensor Networks: Week 1Theanmozhi SNo ratings yet
- S850+ UserManualENGDocument50 pagesS850+ UserManualENGvlavureNo ratings yet
- Shallow Water Acoustic NetworksDocument7 pagesShallow Water Acoustic NetworkskmotiyaniNo ratings yet
- NZWN 41.1 41.2 PDFDocument2 pagesNZWN 41.1 41.2 PDFThenady RiordanNo ratings yet
- Vodafone Qatar Tornado Project: ALU RF Team Alcatel-LucentDocument17 pagesVodafone Qatar Tornado Project: ALU RF Team Alcatel-LucentAchmad AmrullohNo ratings yet
- Comba 9122Document4 pagesComba 9122Pablo BarbozaNo ratings yet
- Survey of Various Bandwidth Enhancement Techniques Used For 5G AntennasDocument21 pagesSurvey of Various Bandwidth Enhancement Techniques Used For 5G AntennasmuteflikaNo ratings yet
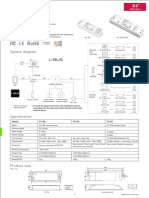
- LED Wireless Driver: System DiagramDocument2 pagesLED Wireless Driver: System Diagrammauro zarateNo ratings yet
- MCQ in Est by S Cuervo of ExcelDocument10 pagesMCQ in Est by S Cuervo of ExcelCatherine TaubNo ratings yet
- 04 Propagation MechanismDocument35 pages04 Propagation MechanismHidayah Kamaludin100% (1)
- Wired Wireless Connected Heating Controls BrochureDocument13 pagesWired Wireless Connected Heating Controls BrochuredamindaNo ratings yet
- Dtma 1800 Aisg-Cwa KathreinDocument3 pagesDtma 1800 Aisg-Cwa KathreincurzNo ratings yet
- Uap Ac M Pro DatasheetDocument4 pagesUap Ac M Pro DatasheetAntonius LouisNo ratings yet
- Model 544 Owner ManualDocument68 pagesModel 544 Owner ManualKenbur100% (1)
- Amtransmitter 160823133113 PDFDocument32 pagesAmtransmitter 160823133113 PDFJirah Sumadia GicangaoNo ratings yet
- Telecom Ch-3.1Document28 pagesTelecom Ch-3.1eyasu abebeNo ratings yet
- + 20db/decade High-Pass Filter (1Document26 pages+ 20db/decade High-Pass Filter (1Rashid ShababNo ratings yet
- Sagemcom Tigr 155r WebDocument2 pagesSagemcom Tigr 155r WebAmit KumarNo ratings yet
- Instruction Manual: VHF Marine TransceiverDocument64 pagesInstruction Manual: VHF Marine TransceiverMichalNo ratings yet
- CELCOM Hammer 1 - FTV - SSO - K00599-L2600-CA2017-NR (SUNGAIKOB - RDC) - v2Document117 pagesCELCOM Hammer 1 - FTV - SSO - K00599-L2600-CA2017-NR (SUNGAIKOB - RDC) - v2Awang FakhruddinNo ratings yet
- AREDN A High Speed Data NetworkDocument5 pagesAREDN A High Speed Data NetworkHam Radio HSMMNo ratings yet
- 1 s2.0 S2666285X22000280 MainDocument6 pages1 s2.0 S2666285X22000280 Main19euec163 TARUN SNo ratings yet
- 4G TechnologyDocument54 pages4G TechnologyGaurav77% (13)