You might also like
- Mecatrónica: modelado, simulación y control de sistemas físicosFrom EverandMecatrónica: modelado, simulación y control de sistemas físicosNo ratings yet
- Cinematica y Dinamica Del RobotDocument17 pagesCinematica y Dinamica Del RobotLuis Hoyos BautistaNo ratings yet
- Toolbox MatlabDocument8 pagesToolbox MatlabSergio SorucoNo ratings yet
- Tipos y Características de RobotsDocument32 pagesTipos y Características de RobotsGray Kwon Fullbuster100% (1)
- Matrices de Transformación HomogéneaDocument17 pagesMatrices de Transformación HomogéneaJhonatan Kevin OrozaNo ratings yet
- Matriz de TransformaciónDocument8 pagesMatriz de TransformaciónpactroNo ratings yet
- Robot Seguidor de LineaDocument4 pagesRobot Seguidor de Lineacheco66666No ratings yet
- Reporte de Práctica 1 - Robotica - Componentes de Un RobotDocument21 pagesReporte de Práctica 1 - Robotica - Componentes de Un RobotAlex VargasNo ratings yet
- Robot XYDocument6 pagesRobot XYFrediSotoNo ratings yet
- PRACTICA #1 DE ROBÓTICA - Transformaciones Espaciales y Matriz de RotacionDocument24 pagesPRACTICA #1 DE ROBÓTICA - Transformaciones Espaciales y Matriz de RotacionJerry Rodriguez FloresNo ratings yet
- Efectores y PrecisionDocument29 pagesEfectores y PrecisionEli D'KidNo ratings yet
- La Conversión de Analógico A DigitalDocument15 pagesLa Conversión de Analógico A DigitalGustavo Leyva EspezúaNo ratings yet
- Taller de Simulacion y Programación de Robots IndustrialesDocument38 pagesTaller de Simulacion y Programación de Robots IndustrialesnessssaNo ratings yet
- Sensores y Servomecanismos TeoriaDocument18 pagesSensores y Servomecanismos TeoriaAldo CiMarNo ratings yet
- E2.2 - Probl. - Res. - de Maq. - de - C.C PDFDocument105 pagesE2.2 - Probl. - Res. - de Maq. - de - C.C PDFJORMAN ALEXÁNDER RAMÍREZ SOTONo ratings yet
- Reporte de SimulaciónDocument11 pagesReporte de SimulaciónIngGuillermoVenturaNo ratings yet
- REPORTE Convertidores CCDocument7 pagesREPORTE Convertidores CCSamuel Beltran C0% (1)
- Robot Balanceado Sobre Sus Ruedas TEORÍA DE CONTROL 2Document25 pagesRobot Balanceado Sobre Sus Ruedas TEORÍA DE CONTROL 2Byron Pinguil SánchezNo ratings yet
- InformeFinal ROBOT3GDL SCARADocument56 pagesInformeFinal ROBOT3GDL SCARAJosé PazNo ratings yet
- Control de ServomotoresDocument8 pagesControl de ServomotoresJOSUÉ RAMIRO GUERRA FLORESNo ratings yet
- Cinematica InversaDocument27 pagesCinematica InversaHector GuerreroNo ratings yet
- Anteproyecto ScaraDocument28 pagesAnteproyecto Scaracarlos lagoNo ratings yet
- UNIDAD 6 RoboticaDocument10 pagesUNIDAD 6 RoboticaAlberto Sánchez Delgado100% (1)
- Sistema Seguidor de LuzDocument6 pagesSistema Seguidor de LuzCesar Ordoñez OrtizNo ratings yet
- Introduccion Al MatlabDocument8 pagesIntroduccion Al MatlabFernando Romero100% (1)
- Tema 2 - Morfología Del RobotDocument44 pagesTema 2 - Morfología Del RobotDulce VelizNo ratings yet
- Control de Trayectoria de Manipulador Robótico de 4 GDLDocument11 pagesControl de Trayectoria de Manipulador Robótico de 4 GDLjecamarenaq100% (1)
- Lab05 Arranq. y D en Logo Soft Comfort SiemensDocument14 pagesLab05 Arranq. y D en Logo Soft Comfort SiemensTabita Romero SolórzanoNo ratings yet
- INTRODUCCION ROBOTICAxDocument50 pagesINTRODUCCION ROBOTICAxArturo TapiaNo ratings yet
- Cinemática DirectaDocument30 pagesCinemática DirectajuanantoniorojasNo ratings yet
- Practica4 - ROBOTICAS MATLABDocument15 pagesPractica4 - ROBOTICAS MATLABferocilloNo ratings yet
- Gnerador de OndasDocument9 pagesGnerador de Ondasvictor RodriguezNo ratings yet
- Morfología Del RobotDocument18 pagesMorfología Del RobotM Sc Marco Antonio Canchola100% (1)
- Toolbox Robotica en MatlabDocument35 pagesToolbox Robotica en MatlabWilliams Ayala100% (1)
- Guias Robotica 2Document16 pagesGuias Robotica 2Michael DavidNo ratings yet
- 2-2) Diseño de Un Robot Autonomo PDFDocument68 pages2-2) Diseño de Un Robot Autonomo PDFJorge Luis Vargas FloresNo ratings yet
- Articulo Robot CartesianoDocument5 pagesArticulo Robot CartesianoRafa SantiagoNo ratings yet
- Estudio de Mercado de Grabador CNC Con Interfaz Gráfica para Uso PúblicoDocument3 pagesEstudio de Mercado de Grabador CNC Con Interfaz Gráfica para Uso PúblicoDiego MuñozNo ratings yet
- Reporte Yugo Escoces Imet 8A Equipo 5Document4 pagesReporte Yugo Escoces Imet 8A Equipo 5Guillermo Filoteo SaucedaNo ratings yet
- Control Cinemática de VelocidadDocument20 pagesControl Cinemática de VelocidadJose Maximo Alvarado OyolaNo ratings yet
- 8 Cinematica Robots MovilesDocument52 pages8 Cinematica Robots MovilesJavier Luna Victoria WenzelNo ratings yet
- Representacion de Denavit HartenbergDocument21 pagesRepresentacion de Denavit HartenbergDiego de la Cruz0% (1)
- Algoritmo para Manipulacion de Objetos en Un Robot PR2Document111 pagesAlgoritmo para Manipulacion de Objetos en Un Robot PR2Marco VargasNo ratings yet
- Robótica Móvil PDFDocument35 pagesRobótica Móvil PDFDavid QuintoNo ratings yet
- Diseño de Controladores DigitalesDocument16 pagesDiseño de Controladores DigitalesNicolás QuirogaNo ratings yet
- Caracerizacion de Robot FamucDocument70 pagesCaracerizacion de Robot FamucJulia FernandezNo ratings yet
- Analisis de Un Robot Manipulador Scara ARTICULODocument22 pagesAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811No ratings yet
- 1.5 AplicacionesDocument19 pages1.5 AplicacionesErick Perez PalaciosNo ratings yet
- Investigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasDocument9 pagesInvestigación Sobre Trayectorias Paramétricas, Perfil Trapezoidal y Restricciones de TrayectoriasLeonardo Romo100% (1)
- Aplicación de La Matriz Jacobiana de Un Sistema de Control Borroso A La Obtención de Sus Estados de EquilibrioDocument11 pagesAplicación de La Matriz Jacobiana de Un Sistema de Control Borroso A La Obtención de Sus Estados de Equilibriovlady120489No ratings yet
- Controladores Digitales de Señales 2003Document26 pagesControladores Digitales de Señales 2003phillamxNo ratings yet
- Módulo de ArranqueDocument2 pagesMódulo de Arranquehector moises torres suarezNo ratings yet
- Reporte Pract1 EmbebidosDocument15 pagesReporte Pract1 Embebidosfedexin_40No ratings yet
- Diseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarDocument12 pagesDiseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarMichael Rimachi100% (2)
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208From EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Rating: 3 out of 5 stars3/5 (1)
- Cinematica de Un RobotDocument7 pagesCinematica de Un Robotakuma119115No ratings yet
- Tipos de Modelado CinematicoDocument5 pagesTipos de Modelado CinematicoJorge MendezNo ratings yet
- U7-Sesion 03Document13 pagesU7-Sesion 03Jorge Gutierrez0% (1)
- Actividad Semana 1Document3 pagesActividad Semana 1María JiménezNo ratings yet
- Alfabetización EmocionalDocument3 pagesAlfabetización EmocionalKevin PerezNo ratings yet
- Introduccion A La EconomiaDocument4 pagesIntroduccion A La EconomiaGio OrtizNo ratings yet
- Historia de La Comunicacion Grupo 9Document9 pagesHistoria de La Comunicacion Grupo 9Juan VasquezNo ratings yet
- Números CardinalesDocument3 pagesNúmeros CardinalesJayro MarroNo ratings yet
- 4 Simbologia y Diagramas de InstrumentacionDocument33 pages4 Simbologia y Diagramas de InstrumentacionCoaching Deportiva Del ValleNo ratings yet
- Brown Eric y Baxter Stephen El Abismo Del Espacio TiempoDocument16 pagesBrown Eric y Baxter Stephen El Abismo Del Espacio TiempompisonNo ratings yet
- Especificaciones Tecnicas de Instalaciones MecanicasDocument13 pagesEspecificaciones Tecnicas de Instalaciones MecanicasDavid Vargas EnriquezNo ratings yet
- ReticuladosDocument7 pagesReticuladosArgenis GonzalezNo ratings yet
- Qué Es LINGODocument15 pagesQué Es LINGOEmily MontoyaNo ratings yet
- Practica 5 Herencia IIDocument11 pagesPractica 5 Herencia IIjulissa guevaraNo ratings yet
- Control de InventariosDocument8 pagesControl de InventariosJINSO VACANo ratings yet
- Thead TH TH TH TH TH TH TH TH TH TH Thead Tbody ?PHP: Nombre Codigo Precio Descripcion StockDocument3 pagesThead TH TH TH TH TH TH TH TH TH TH Thead Tbody ?PHP: Nombre Codigo Precio Descripcion StockFrancizh TohsakaNo ratings yet
- Servicio Autorizado Bosch - Skil - Dremel: Maquina: Pulidora Bosch Gws 24-230 Observaciones: SOLO TRAE LA TUERCADocument1 pageServicio Autorizado Bosch - Skil - Dremel: Maquina: Pulidora Bosch Gws 24-230 Observaciones: SOLO TRAE LA TUERCAmaria torresNo ratings yet
- CPT Cirprotec V CATALOGO DE PRODUCTO PDFDocument68 pagesCPT Cirprotec V CATALOGO DE PRODUCTO PDFAngelica BarbaraNo ratings yet
- Ricardo Andres Castro - MODELO CANVASDocument1 pageRicardo Andres Castro - MODELO CANVASRicardo Andrés CastroNo ratings yet
- Trabajo de Grado Heyder Favian SarmientoDocument29 pagesTrabajo de Grado Heyder Favian Sarmientomiguel_rp18No ratings yet
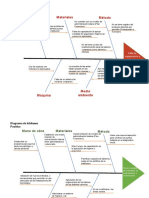
- Diagramas IsickawuaDocument2 pagesDiagramas IsickawuaGianni VázquezNo ratings yet
- DIBUJO INDUSTRIAL ParcialDocument46 pagesDIBUJO INDUSTRIAL ParcialFRANS ROMONo ratings yet
- 11° Formato para Salidas Pedagogicas Ambientales-2Document6 pages11° Formato para Salidas Pedagogicas Ambientales-2Luz Marina Avila CruzNo ratings yet
- Camara de NieblaDocument2 pagesCamara de NieblaGuillərmo MorɐləsNo ratings yet
- 219.973 Valor Neto:: Item Codigo Producto Upre Unidades Kilos Vlr. Unit Vlr. Bruto Dcto %iva Vlr. Iva Vlr. NetoDocument1 page219.973 Valor Neto:: Item Codigo Producto Upre Unidades Kilos Vlr. Unit Vlr. Bruto Dcto %iva Vlr. Iva Vlr. NetoGustavo BaletaNo ratings yet
- Alumnos Con Dificultades de AprendizajeDocument25 pagesAlumnos Con Dificultades de AprendizajemlmleNo ratings yet
- Evaluación Unidad I - 13 Junio - Revisión Del IntentoDocument2 pagesEvaluación Unidad I - 13 Junio - Revisión Del IntentoNoemi AguileraNo ratings yet
- Presupuesto Arquitectura Hospital Ate FINALDocument3 pagesPresupuesto Arquitectura Hospital Ate FINALdayanaNo ratings yet
- FILTRACIÓNDocument38 pagesFILTRACIÓNALVES BROLIN MUCHA MALLAUPOMANo ratings yet
- Mapa Mental Historia MnoalDocument2 pagesMapa Mental Historia Mnoalalexa padillaNo ratings yet
- Rosales Yañez Oscar DanielDocument2 pagesRosales Yañez Oscar Danielmolly260226No ratings yet
- TblarticulosDocument20 pagesTblarticulosAna AriNo ratings yet