You might also like
- Aspire Test FB Tcs Test PattersnsDocument29 pagesAspire Test FB Tcs Test Pattersnsmechgroupno5No ratings yet
- Mechanical Engineering Full Syllabus - Kerala UniversityDocument182 pagesMechanical Engineering Full Syllabus - Kerala UniversityNanda KumarNo ratings yet
- Set Windows Network for DHCP in Under 11 StepsDocument1 pageSet Windows Network for DHCP in Under 11 Stepsmechgroupno5No ratings yet
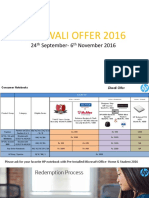
- Detail HP Diwali OfferDocument14 pagesDetail HP Diwali Offermechgroupno5No ratings yet
- Teqip II Mtech PHD AssitDocument3 pagesTeqip II Mtech PHD AssitPrabhu Charan TejaNo ratings yet
- Me Machine DesignDocument86 pagesMe Machine DesignManjunath NadarajanNo ratings yet
- Tcs Eis Whitepaper Multiple PLMs-ERPs IntegrationDocument13 pagesTcs Eis Whitepaper Multiple PLMs-ERPs Integrationkishore_garakipatiNo ratings yet
- Detail HP Diwali OfferDocument14 pagesDetail HP Diwali Offermechgroupno5No ratings yet
- C Lab Question 3Document1 pageC Lab Question 3mechgroupno5No ratings yet
- Solar Chimneys Part 1Document10 pagesSolar Chimneys Part 1mechgroupno5No ratings yet
- Know Ur TcsDocument6 pagesKnow Ur Tcsmechgroupno5No ratings yet
- C Lab Question 8Document1 pageC Lab Question 8mechgroupno5No ratings yet
- Providing Accident Detection in Vehicular Networks Through OBD-II Devices and Android-Based Smart PhonesDocument5 pagesProviding Accident Detection in Vehicular Networks Through OBD-II Devices and Android-Based Smart PhonesIjsrnet EditorialNo ratings yet
- National Admit CardDocument2 pagesNational Admit Cardmechgroupno5No ratings yet
- ExtensionDocument14 pagesExtensionmechgroupno5No ratings yet
- Angular MeasurementDocument32 pagesAngular MeasurementManish GaNo ratings yet
- C Lab Question 2Document2 pagesC Lab Question 2mechgroupno5No ratings yet
- G KDocument15 pagesG Kmechgroupno5No ratings yet
- KamcoDocument2 pagesKamcomechgroupno5No ratings yet
- Control ChartsDocument39 pagesControl ChartsUshnish MisraNo ratings yet
- Angular Measurement2Document29 pagesAngular Measurement2mechgroupno5No ratings yet
- KamcoDocument2 pagesKamcomechgroupno5No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- What Do We Learn From Experimental AlgorDocument723 pagesWhat Do We Learn From Experimental AlgorCamelia ChisalitaNo ratings yet
- 30 Most Asked Coding QuestionsDocument19 pages30 Most Asked Coding QuestionsFarhan Frank MashraqiNo ratings yet
- GE2115 Lab Programs for Circles, Arrays, Series & File HandlingDocument51 pagesGE2115 Lab Programs for Circles, Arrays, Series & File HandlinguserscrybdNo ratings yet
- Lesson 7: Approaches in Literary CriticismDocument14 pagesLesson 7: Approaches in Literary CriticismAngelou CruzNo ratings yet
- PHYS1200 LabA Act2 SomeraSuarezToledoVillafuerteDocument12 pagesPHYS1200 LabA Act2 SomeraSuarezToledoVillafuerteJohn Benedick LagascaNo ratings yet
- Cool Facts About MathsDocument4 pagesCool Facts About Mathsgeena123No ratings yet
- Solving, Graphing, and Analyzing Quadratic Functions: Graphic Organizer!Document6 pagesSolving, Graphing, and Analyzing Quadratic Functions: Graphic Organizer!AthulyaNo ratings yet
- Chapter 4 Integrals: 41. Derivatives of Functions W (T)Document65 pagesChapter 4 Integrals: 41. Derivatives of Functions W (T)羅又寧No ratings yet
- Question Bank Discrete MathsDocument5 pagesQuestion Bank Discrete Mathssureshkumar sambasivanNo ratings yet
- 07 MathematicsDocument313 pages07 MathematicssimpletontsNo ratings yet
- Lesson2 MathDocument7 pagesLesson2 Mathecardnyl25No ratings yet
- Minors Cofactors and Adjoint of A MatrixDocument6 pagesMinors Cofactors and Adjoint of A Matrixsairin parkNo ratings yet
- Simple Radiating SystemsDocument17 pagesSimple Radiating SystemsParag BhattacharyaNo ratings yet
- TCS Previous Years+papersDocument211 pagesTCS Previous Years+papersVinutha MNo ratings yet
- Sliding Mode Control of DC-DC Converters: G. Spiazzi, P. Mattavelli, L. RossettoDocument10 pagesSliding Mode Control of DC-DC Converters: G. Spiazzi, P. Mattavelli, L. RossettoDuc NguyenNo ratings yet
- Criteria Points/Scores 5 4 3 2 1 Knowledge On The Subject MatterDocument2 pagesCriteria Points/Scores 5 4 3 2 1 Knowledge On The Subject MatterMichelle M. BagoNo ratings yet
- EEE 410 - Microprocessors I: Fall 05/06 - Lecture Notes # 13 Outline of The LectureDocument4 pagesEEE 410 - Microprocessors I: Fall 05/06 - Lecture Notes # 13 Outline of The LectureCS420No ratings yet
- Module 6 HMWRK Lesson 8Document2 pagesModule 6 HMWRK Lesson 8ReekhaNo ratings yet
- FYP Guidelines 201718 (14490) - Tech Business (Final) - With RubricsDocument58 pagesFYP Guidelines 201718 (14490) - Tech Business (Final) - With RubricsCecilia CeciCeciNo ratings yet
- Probability Qns 12Document9 pagesProbability Qns 12Vishnu Mohan M SNo ratings yet
- Log RegDocument32 pagesLog RegSIDDHARTH KUMARNo ratings yet
- Advanced Training Guide RecurDynDocument47 pagesAdvanced Training Guide RecurDynJou0411100% (1)
- Pde Final PDFDocument87 pagesPde Final PDFKiprono VincentNo ratings yet
- Module Math 1-5Document81 pagesModule Math 1-5Jared bertjones BoroyNo ratings yet
- Nivale Baxendell FG LabDocument3 pagesNivale Baxendell FG LabNIVALE BAXENDELLNo ratings yet
- Ch3 Bijection PrincipleDocument7 pagesCh3 Bijection PrincipleMichael LinNo ratings yet
- MHS11 Z TransformDocument16 pagesMHS11 Z TransformHassan El-kholyNo ratings yet
- Addition Five Minute Frenzy 2150 AlldfDocument20 pagesAddition Five Minute Frenzy 2150 Alldfeb1rcsNo ratings yet
- Asymptote Horizontal Asymptote: Horizontal Asymptotes Are Horizontal Lines To Which The Function IsDocument19 pagesAsymptote Horizontal Asymptote: Horizontal Asymptotes Are Horizontal Lines To Which The Function IsMohd Hazwan ZulkifliNo ratings yet
- Normal Probability CurveDocument10 pagesNormal Probability CurveVishakha Sankhala0% (1)