You might also like
- El estado mundial de la pesca y la acuicultura 2022: Hacia la transformación azulFrom EverandEl estado mundial de la pesca y la acuicultura 2022: Hacia la transformación azulNo ratings yet
- Trabajo Del HuevoDocument22 pagesTrabajo Del HuevoPilar GayosoNo ratings yet
- Guia Del MaracuyaDocument15 pagesGuia Del MaracuyaJuan Miguel CutipaNo ratings yet
- Elaboración de Cerveza Artesanal A Partir de Maíz BlancokiylhDocument19 pagesElaboración de Cerveza Artesanal A Partir de Maíz BlancokiylhLuis Antonio VieyraNo ratings yet
- Clasificadora de Huevos Por Color Clarita PDFDocument63 pagesClasificadora de Huevos Por Color Clarita PDFOlivia Veronica Challapa Lucas100% (1)
- 261 Chile Potencia AlimentariaDocument40 pages261 Chile Potencia AlimentariapiguchenNo ratings yet
- PROTOCOLO Carambola FinalDocument35 pagesPROTOCOLO Carambola FinalAndres MoralesNo ratings yet
- Crianza de Gallinas para La Producción de HuevosDocument18 pagesCrianza de Gallinas para La Producción de HuevosXavier GuarchNo ratings yet
- Encuesta Global Sobre Produccion de Alimento BalanceadoDocument8 pagesEncuesta Global Sobre Produccion de Alimento BalanceadoGiovannyEscobarHernandezNo ratings yet
- Evidencia GA1-240201528-AA4-EV01. Algoritmo para El Cálculo de Áreas y VolúmenesDocument9 pagesEvidencia GA1-240201528-AA4-EV01. Algoritmo para El Cálculo de Áreas y VolúmenesGUSTAVO PORRAA100% (1)
- SteviaDocument10 pagesSteviaargos1301No ratings yet
- Industria Del CalzadoDocument30 pagesIndustria Del CalzadoSAPIENSPUCALLPANo ratings yet
- Cartilla Proyectos Inclusivos de CacaoDocument32 pagesCartilla Proyectos Inclusivos de CacaoEli R'poNo ratings yet
- Guia Rapida CervezaDocument4 pagesGuia Rapida CervezaJose JulianNo ratings yet
- Sector Carne BovinaDocument12 pagesSector Carne BovinaDaniela Carvajal BurbanoNo ratings yet
- Cómo Limpiar Tu EstómagoDocument5 pagesCómo Limpiar Tu EstómagoAnonymous RwaYouFKNo ratings yet
- Educación Raizal PDFDocument378 pagesEducación Raizal PDFAnttonie100% (1)
- Leche SaborizadaDocument7 pagesLeche SaborizadaPedro MedinaNo ratings yet
- Manual de Apicultura Avanzada y Diversificación Productiva de Apiarios PDFDocument69 pagesManual de Apicultura Avanzada y Diversificación Productiva de Apiarios PDFPeromag100% (1)
- Problemas FermentativosDocument4 pagesProblemas FermentativosAitana Rubio NajeraNo ratings yet
- Vinos de ItaliaDocument14 pagesVinos de ItaliaOmarAlejandroTeranFloresNo ratings yet
- Etapas de Diseño y Desarrollo Del ProductoDocument6 pagesEtapas de Diseño y Desarrollo Del ProductoRocio GorozaveNo ratings yet
- Practibildiad de Una Planta Procesadora de Subproductos AvicolasDocument158 pagesPractibildiad de Una Planta Procesadora de Subproductos AvicolasDaniela Reynaga IbañezNo ratings yet
- PROCESO de ELABORACIÓNDocument16 pagesPROCESO de ELABORACIÓNMarkitos Bernales SarmientoNo ratings yet
- Cacao Ecuatoriano: ChocolateDocument38 pagesCacao Ecuatoriano: ChocolateVictor HerreraNo ratings yet
- Envasado y Producción de Cremas de MezcalDocument1 pageEnvasado y Producción de Cremas de MezcalSebastián Santiago MonterrozaNo ratings yet
- Contaminacion Conservacion y Alteracion de Las Carnes DiapositivasDocument27 pagesContaminacion Conservacion y Alteracion de Las Carnes DiapositivasitzamaraNo ratings yet
- Previo de Lacteos PanelaDocument5 pagesPrevio de Lacteos PanelaMijail Escudero ReyesNo ratings yet
- 35 12.11.22 Acuicultura SimbioticaDocument32 pages35 12.11.22 Acuicultura SimbioticaEdson QuecaraNo ratings yet
- Cacao, Salud y Nutricion Caracas.2018Document43 pagesCacao, Salud y Nutricion Caracas.2018Diego Alvarez PachonNo ratings yet
- Cerveza Artesanal de AmarantoDocument9 pagesCerveza Artesanal de AmarantoKevin van HollandNo ratings yet
- Huyendo Del InfiernoDocument179 pagesHuyendo Del InfiernoCarlos CallejasNo ratings yet
- Planificacion Del Carga Animal Bovina-ComprimidoDocument48 pagesPlanificacion Del Carga Animal Bovina-ComprimidoJhon Yeison DominguezNo ratings yet
- Compilacion de Leyes RelacionadosDocument311 pagesCompilacion de Leyes RelacionadosMiguel AngelNo ratings yet
- Bocadillo de PapayaDocument11 pagesBocadillo de PapayafernandoriiizzzoNo ratings yet
- El Aceite de OlivasDocument218 pagesEl Aceite de OlivasCarla Sabrina ColomboNo ratings yet
- La Grappa 1Document61 pagesLa Grappa 1Daniel CastellucciNo ratings yet
- Importación de Vino A ColombiaDocument2 pagesImportación de Vino A ColombiaSugey MurilloNo ratings yet
- Manualdegallinaponedora Sena 130806102644 Phpapp02Document35 pagesManualdegallinaponedora Sena 130806102644 Phpapp02Jorge Hernan LondoñoNo ratings yet
- Parcial Administración de Servicios de Alimentación 2Document4 pagesParcial Administración de Servicios de Alimentación 2Miguel SanabriaNo ratings yet
- Taller Tipos de ReactoresDocument5 pagesTaller Tipos de ReactoresclapatriciasaNo ratings yet
- Elaboracion de ArequipeDocument15 pagesElaboracion de ArequipeanddyNo ratings yet
- IngenierÍA de Procesos Y de Planta PDFDocument1 pageIngenierÍA de Procesos Y de Planta PDFDiiänä I. ÄguäsNo ratings yet
- NOM-013-ZOO-1994 Campaña Nacional Contra La Enfermedad de Newcatle Presentacion Velogénica CANCELACIONDocument2 pagesNOM-013-ZOO-1994 Campaña Nacional Contra La Enfermedad de Newcatle Presentacion Velogénica CANCELACIONMvz Roberto Toledo RománNo ratings yet
- Acido ButiricoDocument11 pagesAcido ButiricochabucalocaNo ratings yet
- Ejemplo de Modelo CanvasDocument1 pageEjemplo de Modelo CanvasPochoo Alex100% (1)
- Diseño de Recetas CervezaDocument31 pagesDiseño de Recetas CervezaCerveceria lumberjackNo ratings yet
- Mercado de La Miel en ChileDocument5 pagesMercado de La Miel en ChileMatias TrujilloNo ratings yet
- Carta Membrete GOLDDocument4 pagesCarta Membrete GOLDALIXNo ratings yet
- Diagnostico Territorial Eot Jardin 2018Document646 pagesDiagnostico Territorial Eot Jardin 2018Sebastian Mejia EscobarNo ratings yet
- Proyecto CabrasDocument33 pagesProyecto CabrasLeonel Mora VNo ratings yet
- Agua Enriquecida Con OxigenoDocument5 pagesAgua Enriquecida Con OxigenoMagaly Martinez0% (1)
- Taller YogurtDocument8 pagesTaller YogurtRamiro Florez RodriguezNo ratings yet
- Proceso de Elaboracion Del Queso Chihuahua AmandaDocument8 pagesProceso de Elaboracion Del Queso Chihuahua AmandaLACTEOS7bequipo2100% (4)
- Memorias V Encuentro de Semilleros PDFDocument456 pagesMemorias V Encuentro de Semilleros PDFBelliard IkhanaNo ratings yet
- Industria Automotriz en EcuadorDocument103 pagesIndustria Automotriz en EcuadorJuan AlbertoNo ratings yet
- Galeano Moyano Yeli KDocument56 pagesGaleano Moyano Yeli KJose Luis Santa Cruz TapullimaNo ratings yet
- Jimenabeltran Ramírez.2011Document171 pagesJimenabeltran Ramírez.2011Daniel LópezNo ratings yet
- DDMNI103Document55 pagesDDMNI103gersonNo ratings yet
- Choritos Estudio MecanicaDocument80 pagesChoritos Estudio MecanicaJose Gabriel Almonacid GonzalezNo ratings yet
- Proyecto Remodelacion Urgencias Hvb. Instalaciones EspecialesDocument182 pagesProyecto Remodelacion Urgencias Hvb. Instalaciones EspecialesFernando Martínez PonceNo ratings yet
- Codificaciones HDB3 B8ZS - OdtDocument5 pagesCodificaciones HDB3 B8ZS - Odtkowalski_tuxorNo ratings yet
- Manual Lab - Electronica IDocument102 pagesManual Lab - Electronica Ijeison ariasNo ratings yet
- Tarea de Casa 2Document4 pagesTarea de Casa 2christianNo ratings yet
- Programacion Del Coagulometro Coatron X SeriesDocument7 pagesProgramacion Del Coagulometro Coatron X SeriesRaquel Adriana LennyNo ratings yet
- UX Globant - Como Diseniar La Mejor Experiencia Movil para El Usuario PDFDocument9 pagesUX Globant - Como Diseniar La Mejor Experiencia Movil para El Usuario PDFANKAU2No ratings yet
- TermografDocument16 pagesTermografLa Mata Mendez100% (1)
- Difraccion e InterferenciaDocument4 pagesDifraccion e InterferenciaEsteban AristizabalNo ratings yet
- 1 Introduccion MCU MecaDocument40 pages1 Introduccion MCU MecaDavid Gomez DiazNo ratings yet
- TAREA #1 ElectroDocument2 pagesTAREA #1 ElectroMaria Isabel Fernandez GuevaraNo ratings yet
- Ug Matrix S D EsDocument8 pagesUg Matrix S D EsPacoBautistaNo ratings yet
- El Sensor de Corriente ACS712Document4 pagesEl Sensor de Corriente ACS712EnriqueRomero0% (1)
- BROCHADODocument5 pagesBROCHADOGabriel Castro Rivera R MNo ratings yet
- La Didactica de La Energia Inalambrica Mediante La Bobina de Nicola TeslaDocument19 pagesLa Didactica de La Energia Inalambrica Mediante La Bobina de Nicola TeslaDaniela Apaza GarciaNo ratings yet
- Designacion de Terminales Alternador 0 59976Document26 pagesDesignacion de Terminales Alternador 0 59976alfredo100% (1)
- Motores 50Hz Alimentados A 60Hz y ViceversaDocument1 pageMotores 50Hz Alimentados A 60Hz y ViceversaCristian RuizNo ratings yet
- Circuitos Electricos WordDocument32 pagesCircuitos Electricos WordErick Torrejon Davalos100% (1)
- Cuestionarios Ciro PozoDocument3 pagesCuestionarios Ciro PozoAntuanetNo ratings yet
- Evaluacion 01 de Rebobinado de Motores MonofasicosDocument2 pagesEvaluacion 01 de Rebobinado de Motores MonofasicosEliana ArevaloNo ratings yet
- Modulo PDFDocument36 pagesModulo PDFLaura PatriciaNo ratings yet
- Resumen Grabación Magnética AnalógicaDocument4 pagesResumen Grabación Magnética AnalógicaMigue AvelarNo ratings yet
- Laboratorio4 Electrónica PDFDocument5 pagesLaboratorio4 Electrónica PDFMartinez EstefaníaNo ratings yet
- P64 ManualDocument624 pagesP64 ManualLuis MorenoNo ratings yet
- Informe Tecnico Efrain CoyagoDocument11 pagesInforme Tecnico Efrain CoyagoPricila BarreraNo ratings yet
- Documento 6 1Document15 pagesDocumento 6 1Ivan BarrosoNo ratings yet
- Fluke - Generador de LazoDocument16 pagesFluke - Generador de LazoJoel CandiaNo ratings yet
- Operadores BinariosDocument2 pagesOperadores BinariosProfa Lucía Santeramo100% (2)
- Clase 11 - Amplificador Logarítmico y AntilogarítmicoDocument14 pagesClase 11 - Amplificador Logarítmico y AntilogarítmicoSHERLYN ANDREA GUZMAN GRACIANONo ratings yet
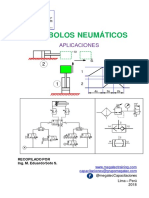
- Simbolos NeumaticosDocument46 pagesSimbolos NeumaticosWaldir Jhon Gonzalez67% (3)
- RP 20la70Document27 pagesRP 20la70alexhaloNo ratings yet