You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Calculus 2: Engr. Luisito Lolong Lacatan, Pcpe, PHDDocument46 pagesCalculus 2: Engr. Luisito Lolong Lacatan, Pcpe, PHDJohnvher Vincent OrdavezaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Partial Differential Equations: Lecture NotesDocument72 pagesPartial Differential Equations: Lecture Notespalanipaaaa0% (2)
- Lecture 5 - DifferentiationDocument29 pagesLecture 5 - DifferentiationNabiha AzadNo ratings yet
- Latex TutorialDocument10 pagesLatex TutorialElenaMicu100% (1)
- Methods On Nonlinear Elliptic PDEDocument260 pagesMethods On Nonlinear Elliptic PDEnitrogen16No ratings yet
- Mathematics - Foundations of CalculusDocument182 pagesMathematics - Foundations of CalculusJorge100% (16)
- A IserlesDocument70 pagesA IserlesAnkur BhatnagarNo ratings yet
- Tutorial - 5: Meshing Without SurfacesDocument10 pagesTutorial - 5: Meshing Without SurfacesVishal VNo ratings yet
- Ryplasticity PropertyDocument1 pageRyplasticity PropertyVishal VNo ratings yet
- 7 Abaqus Conv GuidelinesDocument4 pages7 Abaqus Conv GuidelinesSrinivas RallabandiNo ratings yet
- Enite Caue of TechDocument1 pageEnite Caue of TechVishal VNo ratings yet
- DSDDocument8 pagesDSDChristopher RiceNo ratings yet
- Learn Abaquss Script in One HourDocument12 pagesLearn Abaquss Script in One HourbaspopNo ratings yet
- Path UmatDocument1 pagePath UmatVishal VNo ratings yet
- Intrucciones de Instalaciónde Abacus Simulias 2016Document12 pagesIntrucciones de Instalaciónde Abacus Simulias 2016carlos solorioNo ratings yet
- HighwayDocument26 pagesHighwayAnonymous D5g37JjpGBNo ratings yet
- 1 Viga ColunaDocument27 pages1 Viga ColunaFrank JohnNo ratings yet
- AbaqusDocument28 pagesAbaqusquastardNo ratings yet
- 2.1.5 Stress-Strain Relation For Anisotropic MaterialsDocument6 pages2.1.5 Stress-Strain Relation For Anisotropic MaterialsVishal VNo ratings yet
- Bharat Sanchar Nigam Limited Recruitment BoardDocument2 pagesBharat Sanchar Nigam Limited Recruitment BoardVishal VNo ratings yet
- Teachers'Day Invitation 2016Document2 pagesTeachers'Day Invitation 2016Vishal VNo ratings yet
- Important Information Regarding InterviewDocument1 pageImportant Information Regarding InterviewVishal VNo ratings yet
- TensoresDocument40 pagesTensoresMateus Corato Zanarella100% (1)
- Anisotropy: From Wikipedia, The Free EncyclopediaDocument4 pagesAnisotropy: From Wikipedia, The Free EncyclopediaVishal VNo ratings yet
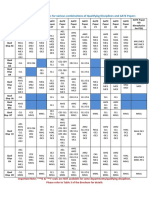
- Table 4: Eligible Programmes For Various Combinations of Qualifying Disciplines and GATE PapersDocument8 pagesTable 4: Eligible Programmes For Various Combinations of Qualifying Disciplines and GATE PapersVishal VNo ratings yet
- Unit III CTMDocument23 pagesUnit III CTMShashank SinghNo ratings yet
- Am FM SylabusDocument1 pageAm FM SylabusVishal VNo ratings yet
- 05 2016 - 2017 H2 Maths Differentiation Techniques TutorialDocument3 pages05 2016 - 2017 H2 Maths Differentiation Techniques TutorialihohsrogsNo ratings yet
- Homework 4: Ordinary Differential EquationsDocument2 pagesHomework 4: Ordinary Differential EquationsGoosline Alfredo PereiraNo ratings yet
- RK 4th Order MethodDocument20 pagesRK 4th Order Methodaaron mathewsNo ratings yet
- The Chain RuleDocument40 pagesThe Chain RuleThoughtsNo ratings yet
- Homework 1: Exercise 1.13Document8 pagesHomework 1: Exercise 1.13Martín ReynosoNo ratings yet
- Computational Physics Exam 02: 1. Types of EquationsDocument4 pagesComputational Physics Exam 02: 1. Types of EquationsBradley AndrewNo ratings yet
- I Xi Yi F (Xi, Yi) Yi+1: Ordinary Differential Equation - 1St OrderDocument6 pagesI Xi Yi F (Xi, Yi) Yi+1: Ordinary Differential Equation - 1St OrderJohn Archie Dela CruzNo ratings yet
- Vector and ODEsDocument23 pagesVector and ODEsChengeto MajoniNo ratings yet
- Math 211EDocument4 pagesMath 211EJessie SumajitNo ratings yet
- CHAPTER II: First Order Linear Partial Differential EquationsDocument4 pagesCHAPTER II: First Order Linear Partial Differential Equationsshishir barai0% (1)
- Proposed Syllabus by Zubair Khan Garhmukteshwar Bachelors of Computer Application Semester - Wise Breakup of CourseDocument47 pagesProposed Syllabus by Zubair Khan Garhmukteshwar Bachelors of Computer Application Semester - Wise Breakup of Coursemominkhan7764No ratings yet
- BT-202-CBGS: B.Tech., I & II SemesterDocument4 pagesBT-202-CBGS: B.Tech., I & II SemesterCadalt CyrusNo ratings yet
- GetachewDocument4 pagesGetachewhundasa chalaNo ratings yet
- Calculus Differentiation RulesDocument2 pagesCalculus Differentiation Ruleskyle audrey floresNo ratings yet
- 2010 Lecture 005 PDFDocument43 pages2010 Lecture 005 PDFeouahiauNo ratings yet
- 311302-BASIC MATHEMATICS (K-Scheme-Syllabus)Document8 pages311302-BASIC MATHEMATICS (K-Scheme-Syllabus)jacksparrowcom4No ratings yet
- Ordinary and Partial Differential Equations and ApplicationsDocument16 pagesOrdinary and Partial Differential Equations and ApplicationsBarrack YomamaNo ratings yet
- Introduction To Odes in Scilab: Aditya SenguptaDocument37 pagesIntroduction To Odes in Scilab: Aditya SenguptamanojNo ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFEggy WirahmanNo ratings yet
- Chapter 11 Introduction To PDE PDFDocument44 pagesChapter 11 Introduction To PDE PDFFitri AniNo ratings yet
- Learning Material 3 - Laplace TransformationDocument13 pagesLearning Material 3 - Laplace TransformationJade GurtizaNo ratings yet
- Gujarat Technological University: Civil & Infrastructure EngineeringDocument3 pagesGujarat Technological University: Civil & Infrastructure EngineeringRavi SidhpuriaNo ratings yet
- System of Linear EquationDocument37 pagesSystem of Linear EquationShubham MishraNo ratings yet
- SMA 2232 - Lec 1 - 2023Document6 pagesSMA 2232 - Lec 1 - 2023woche.telto22No ratings yet