You might also like
- Em Lab-II ManualDocument45 pagesEm Lab-II Manualrkadiraj701150% (4)
- Exp MachinesDocument8 pagesExp MachinesAngelina JolieNo ratings yet
- Prosedur Percobaan Motor SinkronSinkron Generator SinkronDocument10 pagesProsedur Percobaan Motor SinkronSinkron Generator SinkronDara AmeliaNo ratings yet
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- M.A.M School of Engineering TRICHY - 621 105Document97 pagesM.A.M School of Engineering TRICHY - 621 105Preethi RanganathanNo ratings yet
- Induction Motor Lab ManualDocument11 pagesInduction Motor Lab ManualRabah ZaimeddineNo ratings yet
- Lab Manual: Ee 2305 Electrical Machines Lab IiDocument38 pagesLab Manual: Ee 2305 Electrical Machines Lab IiskrtamilNo ratings yet
- EM-I LAB-finalDocument114 pagesEM-I LAB-finalHarimadhavareddy YenireddyNo ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotorVaibhavNo ratings yet
- EM-II FinalDocument57 pagesEM-II FinalAtchyut Satya KumarNo ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- Brake Test DC Series MotorDocument3 pagesBrake Test DC Series MotorVARAPRASADNo ratings yet
- Expt No: Date: Load Test On 1Φ Induction Motor AIMDocument9 pagesExpt No: Date: Load Test On 1Φ Induction Motor AIMDina GaranNo ratings yet
- Control System Lab ManualDocument63 pagesControl System Lab ManualkrishnandrkNo ratings yet
- Load Test On 3 Phase Induction MotorDocument4 pagesLoad Test On 3 Phase Induction MotorAdi AdnanNo ratings yet
- Lab 1 Power Supply and Torque MeterDocument5 pagesLab 1 Power Supply and Torque Metermuhd danialNo ratings yet
- Jobsheet 2 Mesin Sinkron 2019Document10 pagesJobsheet 2 Mesin Sinkron 2019Koko AhmadNo ratings yet
- Speed Torque Characteristics of 3 Phase Induction MotorDocument4 pagesSpeed Torque Characteristics of 3 Phase Induction MotorAdi AdnanNo ratings yet
- Swinburns'S Test On D.C Shunt MachineDocument15 pagesSwinburns'S Test On D.C Shunt MachineharimadhavareddyNo ratings yet
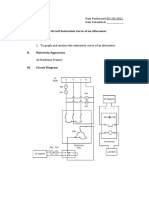
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 pagesOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNo ratings yet
- 2 Machine LabDocument4 pages2 Machine LabManoj GuptaNo ratings yet
- Circuit Diagram: U19Ee306 - Electrical Machines - I LaboratoryDocument16 pagesCircuit Diagram: U19Ee306 - Electrical Machines - I LaboratorySanthoshNo ratings yet
- Ism LabDocument67 pagesIsm LabpadmavathiNo ratings yet
- Electrical Machines II Lab ManualDocument28 pagesElectrical Machines II Lab ManualAnith Krishnan83% (6)
- Machine Based Experiments Lab Report-1 Name: Karthickeien E BY: CH - EN.U4CCE21024 Group: A TopicDocument14 pagesMachine Based Experiments Lab Report-1 Name: Karthickeien E BY: CH - EN.U4CCE21024 Group: A TopicKartheepan KaNo ratings yet
- EM Lab For ECEDocument24 pagesEM Lab For ECEAnbalagan GuruNo ratings yet
- EML Manual (2019 2023)Document43 pagesEML Manual (2019 2023)Areeba NasirNo ratings yet
- Aula - Ensaio de Vazioem Gerador Síncrono - 230831 - 175852Document6 pagesAula - Ensaio de Vazioem Gerador Síncrono - 230831 - 175852cristian kelvinNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- Anna University Practical Lab Manuals For Engineering StudentsDocument13 pagesAnna University Practical Lab Manuals For Engineering StudentsTinku RathoreNo ratings yet
- Exp1 EED3012 WRIMMotor Experiments FH2MK3Document3 pagesExp1 EED3012 WRIMMotor Experiments FH2MK3EnesVSNo ratings yet
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab Manual FINAL PDFDocument82 pagesBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab Manual FINAL PDFBHUVANA ARUMUGAMNo ratings yet
- Exp. 2 - OCC and Load Test On AlternatorDocument7 pagesExp. 2 - OCC and Load Test On AlternatorKailash Jagarwal100% (1)
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualDocument81 pagesBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualAntonio LeonNo ratings yet
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFDocument15 pages142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduNo ratings yet
- Em-Ii ExperimentDocument19 pagesEm-Ii Experimentprince rajNo ratings yet
- Basic Electrical Laboratory Manual: Department of Electrical EngineeringDocument42 pagesBasic Electrical Laboratory Manual: Department of Electrical EngineeringSourav SahooNo ratings yet
- Load Test On Single Phase Induction Motor: EEE 308 Practical Experiment No. 2 Matric Number........................Document3 pagesLoad Test On Single Phase Induction Motor: EEE 308 Practical Experiment No. 2 Matric Number........................Oladeji Ifedayo RNo ratings yet
- Electrical Machines-I Lab Manual R16 Modified PDFDocument83 pagesElectrical Machines-I Lab Manual R16 Modified PDFsk ibrahimNo ratings yet
- Swinburne'S Test ON D.C. Shunt Machine. (Predetermination of Efficiency of Given D.C.Shunt Machine Working As Motor and Generator)Document24 pagesSwinburne'S Test ON D.C. Shunt Machine. (Predetermination of Efficiency of Given D.C.Shunt Machine Working As Motor and Generator)pragatinareshNo ratings yet
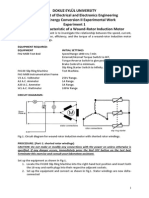
- EEE363 (Exp 9) Study of The Torque Speed Relationship of Wound Rotor Induction Motor With Variable ResistanceDocument7 pagesEEE363 (Exp 9) Study of The Torque Speed Relationship of Wound Rotor Induction Motor With Variable Resistancesalad.ass420420No ratings yet
- No Load and Block Rotor Test 3 PH Ind Motor DolDocument14 pagesNo Load and Block Rotor Test 3 PH Ind Motor DolalexNo ratings yet
- Sumpner's TestDocument5 pagesSumpner's TestDina GaranNo ratings yet
- Experiment No-01 AIM: To Perform No Load Test On 3ø Induction MotorDocument17 pagesExperiment No-01 AIM: To Perform No Load Test On 3ø Induction Motornainesh goteNo ratings yet
- Electrical Machines I Lab ManualDocument54 pagesElectrical Machines I Lab ManualThangam Mahesh89% (18)
- Lab # 7 - DC Machines Part 3 Separately Excited DC GeneratorDocument6 pagesLab # 7 - DC Machines Part 3 Separately Excited DC GeneratorAdeel SyedNo ratings yet
- Lab 3 Squirrel Cage Induction Machine-1Document8 pagesLab 3 Squirrel Cage Induction Machine-1max100% (1)
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualDocument162 pagesBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualAntonio LeonNo ratings yet
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocument9 pagesExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNo ratings yet
- Experiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheoryDocument7 pagesExperiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheorySur ShriNo ratings yet
- Brake Test DC Shunt MotorDocument3 pagesBrake Test DC Shunt MotorVARAPRASADNo ratings yet
- EMSL Cycle 2 ExptsDocument25 pagesEMSL Cycle 2 ExptsVarun ChoudharyNo ratings yet
- Binder 1Document48 pagesBinder 1deepanshu rajputNo ratings yet
- Exp 1 N 2Document16 pagesExp 1 N 2mallikarjunbpatilNo ratings yet
- Experiment 6: Alternator Characteristics ObjectDocument4 pagesExperiment 6: Alternator Characteristics ObjectarjayNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Bhsa Inggris'Document5 pagesBhsa Inggris'Dwi NovianaNo ratings yet
- List of Japanese Company in IndiaDocument2 pagesList of Japanese Company in Indiakaushalshinde317No ratings yet
- Lab Assignment-1 1. Create Table Student (Rno, Name, DOB, Gender, Class, College, City, Marks)Document7 pagesLab Assignment-1 1. Create Table Student (Rno, Name, DOB, Gender, Class, College, City, Marks)supreetNo ratings yet
- Faculty Profile: Dr. Injam Siva ParvathiDocument9 pagesFaculty Profile: Dr. Injam Siva ParvathiMr. Y. RajeshNo ratings yet
- Dark Elves WarbandDocument9 pagesDark Elves Warbanddueydueck100% (1)
- Module 1 - AE4 - Review of Basic Mathematical Concepts (For Discussion)Document36 pagesModule 1 - AE4 - Review of Basic Mathematical Concepts (For Discussion)Kimberly Jean LautrizoNo ratings yet
- Poster - Combur10 Test Parameters PDFDocument1 pagePoster - Combur10 Test Parameters PDFAde FeriyatnaNo ratings yet
- Workbook No. 2 by Jimena SosaDocument125 pagesWorkbook No. 2 by Jimena SosaLourdes de Fatima Pacheco VasquezNo ratings yet
- Craig - 4353 TX CobraDocument3 pagesCraig - 4353 TX CobraJorge ContrerasNo ratings yet
- Dividing Fractions : and What It MeansDocument22 pagesDividing Fractions : and What It MeansFlors BorneaNo ratings yet
- Q4 Lesson 3 Hinge Theorem and Its ConverseDocument36 pagesQ4 Lesson 3 Hinge Theorem and Its ConverseZenn Tee100% (1)
- Truss Design GuidDocument3 pagesTruss Design GuidRafi HasanNo ratings yet
- AGPT04I-09 Guide To Pavement Technology Part 4I Earthworks MaterialsDocument47 pagesAGPT04I-09 Guide To Pavement Technology Part 4I Earthworks MaterialsLeandroNo ratings yet
- MKRS Training ProfileDocument10 pagesMKRS Training ProfileZafri MKRS100% (1)
- 2018-Me-184 MMDocument28 pages2018-Me-184 MMKhizer Nauman RanaNo ratings yet
- Automatic Door Opener With PIC12C508 CircuitDocument3 pagesAutomatic Door Opener With PIC12C508 CircuitLingaraj BeharaNo ratings yet
- Heavy Earth Moving MachinaryDocument34 pagesHeavy Earth Moving MachinaryMAZHAR ALAMNo ratings yet
- Chm130 Test Batch-2Document3 pagesChm130 Test Batch-2misakisuki7No ratings yet
- Standard Safety Practices Manual PDFDocument350 pagesStandard Safety Practices Manual PDFsithulibraNo ratings yet
- 14 Parabola Formula Sheets QuizrrDocument9 pages14 Parabola Formula Sheets QuizrrChandanNo ratings yet
- Carbohydrate-Related Diseases Term PaperDocument5 pagesCarbohydrate-Related Diseases Term Paperheiress comiaNo ratings yet
- CPower Product Training.09.2016.EnDocument70 pagesCPower Product Training.09.2016.Enerdinc100% (1)
- Scorpio PDFDocument3 pagesScorpio PDFnimi2364010No ratings yet
- Galactic Federations, Councils Secret Space Programs (Michael Salla) (Z-Library)Document289 pagesGalactic Federations, Councils Secret Space Programs (Michael Salla) (Z-Library)Junior VeigaNo ratings yet
- Lecture On Metallurgical BalancesDocument14 pagesLecture On Metallurgical BalancesVladimir LopezNo ratings yet
- Kantha Embroidery by Nanduri Asha, Shreya Gulati, Saloni PriyaDocument17 pagesKantha Embroidery by Nanduri Asha, Shreya Gulati, Saloni PriyaShreyaa Gulati100% (3)
- Plugs, Fuses and Household ElectricityDocument4 pagesPlugs, Fuses and Household ElectricityRonald HuynhNo ratings yet
- Comsol ProfileDocument4 pagesComsol ProfilePrashant KumarNo ratings yet
- Ebp Cedera Kepala - The Effect of Giving Oxygenation With Simple Oxygen Mask andDocument6 pagesEbp Cedera Kepala - The Effect of Giving Oxygenation With Simple Oxygen Mask andNindy kusuma wardaniNo ratings yet
- The Singapore Engineer - September 2018 IssueDocument27 pagesThe Singapore Engineer - September 2018 Issuekrpt0tytNo ratings yet