You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Marijuana Grow Basics - Jorge CervantesDocument389 pagesMarijuana Grow Basics - Jorge CervantesHugo Herrera100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Quality CircleDocument33 pagesQuality CircleSudeesh SudevanNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Masonry Brickwork 230 MMDocument1 pageMasonry Brickwork 230 MMrohanNo ratings yet
- IEC-60721-3-3-2019 (Enviromental Conditions)Document12 pagesIEC-60721-3-3-2019 (Enviromental Conditions)Electrical DistributionNo ratings yet
- Indian Institute OF Management, BangaloreDocument20 pagesIndian Institute OF Management, BangaloreGagandeep SinghNo ratings yet
- MG T 101 Short Notes Lectures 2345Document29 pagesMG T 101 Short Notes Lectures 2345Abdul wadoodNo ratings yet
- Khyber Pakhtunkhwa Public Service Commission: Dvertisement ODocument5 pagesKhyber Pakhtunkhwa Public Service Commission: Dvertisement OSahibzada Wajid Ali BrugNo ratings yet
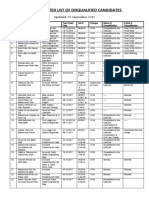
- Consolidate List of Disqualified Candidates 2019 Ufm Cases 5.9.2019Document5 pagesConsolidate List of Disqualified Candidates 2019 Ufm Cases 5.9.2019Abdul wadoodNo ratings yet
- Ability Test Schedule April 2019Document3 pagesAbility Test Schedule April 2019Abdul wadoodNo ratings yet
- Letterhead Template 39Document1 pageLetterhead Template 39Abdul wadoodNo ratings yet
- Date Sheet For Member of Service ExamDocument1 pageDate Sheet For Member of Service ExamAbdul wadoodNo ratings yet
- Letterhead Template 40.Document1 pageLetterhead Template 40.Abdul wadoodNo ratings yet
- Ability Test Schedule January 2019Document3 pagesAbility Test Schedule January 2019Muhammad HijabNo ratings yet
- Khyber Pakhtunkhwa Public Service Commission: Dvertisement ODocument5 pagesKhyber Pakhtunkhwa Public Service Commission: Dvertisement OSahibzada Wajid Ali BrugNo ratings yet
- JobDocument15 pagesJobihsan khan.No ratings yet
- Ability Tests Schedule Syllabus December 2018 v2Document13 pagesAbility Tests Schedule Syllabus December 2018 v2Sheheryar KhanNo ratings yet
- Project DocumentationDocument5 pagesProject DocumentationShambhulal VermaNo ratings yet
- Scheme and Syllaus May June 2018Document10 pagesScheme and Syllaus May June 2018Abdul wadoodNo ratings yet
- Ability Tests Schedule Syllabus December 2018 v2Document13 pagesAbility Tests Schedule Syllabus December 2018 v2Sheheryar KhanNo ratings yet
- Ability Test Schedule 16 Agust 2018Document3 pagesAbility Test Schedule 16 Agust 2018Amin piontNo ratings yet
- Final Schedule of Ability Test March 2016 WebDocument2 pagesFinal Schedule of Ability Test March 2016 WebAbdul wadoodNo ratings yet
- Ability Practical Physical Tests June July 2019Document4 pagesAbility Practical Physical Tests June July 2019Arif Ullah KhanNo ratings yet
- JobDocument15 pagesJobihsan khan.No ratings yet
- New Microsoft Office Word DocumentDocument16 pagesNew Microsoft Office Word DocumentAbdul wadood100% (1)
- Lecture 12 PDFDocument10 pagesLecture 12 PDFAbdul wadoodNo ratings yet
- Lecture 11 PDFDocument7 pagesLecture 11 PDFAbdul wadoodNo ratings yet
- Lecture 5 6 PDFDocument12 pagesLecture 5 6 PDFAbdul wadoodNo ratings yet
- Lecture 3 4 PDFDocument12 pagesLecture 3 4 PDFAbdul wadoodNo ratings yet
- Lecture 15 16 PDFDocument21 pagesLecture 15 16 PDFAbdul wadoodNo ratings yet
- Lecture 10 PDFDocument8 pagesLecture 10 PDFAbdul wadoodNo ratings yet
- Lec 03 PDFDocument22 pagesLec 03 PDFAbdul wadoodNo ratings yet
- Lecture 7 PDFDocument5 pagesLecture 7 PDFAbdul wadoodNo ratings yet
- Lecture 8 PDFDocument12 pagesLecture 8 PDFAbdul wadoodNo ratings yet
- Lecture 2 PDFDocument4 pagesLecture 2 PDFAbdul wadoodNo ratings yet
- Lecture 1 PDFDocument5 pagesLecture 1 PDFAbdul wadoodNo ratings yet
- Types of LogoDocument3 pagesTypes of Logomark anthony ordonioNo ratings yet
- Febrile SeizureDocument3 pagesFebrile SeizureClyxille GiradoNo ratings yet
- Legal Principles and The Limits of The Law Raz PDFDocument33 pagesLegal Principles and The Limits of The Law Raz PDFlpakgpwj100% (2)
- JR Hydraulic Eng. Waterways Bed Protection Incomat BelfastDocument2 pagesJR Hydraulic Eng. Waterways Bed Protection Incomat Belfastpablopadawan1No ratings yet
- WA Beretta M92FS Parts ListDocument2 pagesWA Beretta M92FS Parts ListDenis Deki NehezNo ratings yet
- C11 RacloprideDocument5 pagesC11 RacloprideAvina 123No ratings yet
- EE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherDocument23 pagesEE-434 Power Electronics: Engr. Dr. Hadeed Ahmed SherMirza Azhar HaseebNo ratings yet
- Digital Citizenship Initiative To Better Support The 21 Century Needs of StudentsDocument3 pagesDigital Citizenship Initiative To Better Support The 21 Century Needs of StudentsElewanya UnoguNo ratings yet
- Policies and Regulations On EV Charging in India PPT KrishnaDocument9 pagesPolicies and Regulations On EV Charging in India PPT KrishnaSonal ChoudharyNo ratings yet
- Chemical Cleaning Products Are Destroying The Ecosystem and Your Septic Tank - Organica BiotechDocument14 pagesChemical Cleaning Products Are Destroying The Ecosystem and Your Septic Tank - Organica BiotechKrispin FongNo ratings yet
- Merchandise Floor Ready Standards - Supplier InformationDocument46 pagesMerchandise Floor Ready Standards - Supplier InformationGarmentLearner100% (1)
- Crash Cart - General Checklist For Medical Supplies On Crash CartsDocument3 pagesCrash Cart - General Checklist For Medical Supplies On Crash CartsYassen ManiriNo ratings yet
- StsDocument10 pagesStsSamonte, KimNo ratings yet
- 01 Design of Flexible Pavement Using Coir GeotextilesDocument126 pages01 Design of Flexible Pavement Using Coir GeotextilesSreeja Sadanandan100% (1)
- 9AKK101130D1664 OISxx Evolution PresentationDocument16 pages9AKK101130D1664 OISxx Evolution PresentationfxvNo ratings yet
- Summer Internship Project-NishantDocument80 pagesSummer Internship Project-Nishantnishant singhNo ratings yet
- The Emperor Jones: What's Inside in ContextDocument27 pagesThe Emperor Jones: What's Inside in ContextHarshvardhan RaiNo ratings yet
- The Slave Trade and The British Empire An Audit of Commemoration in WalesDocument133 pagesThe Slave Trade and The British Empire An Audit of Commemoration in WaleslegoarkeologNo ratings yet
- Aquafine Optivenn Series Data SheetDocument8 pagesAquafine Optivenn Series Data SheetKenz ZhouNo ratings yet
- A.2.3. Passive Transport Systems MCQsDocument3 pagesA.2.3. Passive Transport Systems MCQsPalanisamy SelvamaniNo ratings yet
- Electrocardiography - Wikipedia, The Free EncyclopediaDocument18 pagesElectrocardiography - Wikipedia, The Free Encyclopediapayments8543No ratings yet
- Kastanakis 2014Document8 pagesKastanakis 2014Andreea Georgiana MocanuNo ratings yet
- Zhihua Yao - Dignaga and The 4 Types of Perception (JIP 04)Document24 pagesZhihua Yao - Dignaga and The 4 Types of Perception (JIP 04)Carlos Caicedo-Russi100% (1)
- Biomechanics of Advanced Tennis: January 2003Document7 pagesBiomechanics of Advanced Tennis: January 2003Katrien BalNo ratings yet