You might also like
- Body Tensor Fields in Continuum Mechanics: With Applications to Polymer RheologyFrom EverandBody Tensor Fields in Continuum Mechanics: With Applications to Polymer RheologyRating: 3 out of 5 stars3/5 (1)
- Lagrangian Formulation of Mechanics: Descriptions of Motion in Configuration SpaceDocument5 pagesLagrangian Formulation of Mechanics: Descriptions of Motion in Configuration SpaceNisar MalikNo ratings yet
- ITRS PZ90 and WGS84 PDFDocument7 pagesITRS PZ90 and WGS84 PDFGilangRizkyRamadhanNo ratings yet
- What Is A Coordinate System?Document6 pagesWhat Is A Coordinate System?EMINAT PRINCE100% (1)
- Computing Periodic Orbits and Their Bifurcations With Automatic DifferentiationDocument36 pagesComputing Periodic Orbits and Their Bifurcations With Automatic DifferentiationMagno CostaNo ratings yet
- Tensor Analysis-Chapter 1Document81 pagesTensor Analysis-Chapter 1qftgaugeNo ratings yet
- Domain Structures and Boundary Conditions: Numerical Weather Prediction and Data Assimilation, First EditionDocument34 pagesDomain Structures and Boundary Conditions: Numerical Weather Prediction and Data Assimilation, First EditionDiamondChuNo ratings yet
- Denavit-Hartenberg Parameters - WikipediaDocument19 pagesDenavit-Hartenberg Parameters - Wikipediavikas16051998No ratings yet
- Aeroelasticity PDFDocument19 pagesAeroelasticity PDFFabio BarrosNo ratings yet
- Coordinate System - WikipediaDocument11 pagesCoordinate System - WikipediaCarlton Gêê PiruNo ratings yet
- Using Redundant Internal Coordinates Optimize Equilibrium Geometries and TransitionDocument8 pagesUsing Redundant Internal Coordinates Optimize Equilibrium Geometries and TransitionLorena Monterrosas PérezNo ratings yet
- Paleocurrent Data AnalysisDocument20 pagesPaleocurrent Data AnalysisArijit LaikNo ratings yet
- Gaskin MechanicsDocument47 pagesGaskin MechanicsLia MewwNo ratings yet
- 04 - Local Coordinate SystemDocument18 pages04 - Local Coordinate Systemerikoh100% (2)
- Cap4 PDFDocument5 pagesCap4 PDFEduardo jose Miss decenaNo ratings yet
- 38 KoopDocument240 pages38 KoopmasoudsanatiNo ratings yet
- Geometric ConstraintDocument34 pagesGeometric ConstraintjunhyolNo ratings yet
- Large Scale Geodetic Least Squares Adjustment by Dissection and Orthogonal DecompositionDocument40 pagesLarge Scale Geodetic Least Squares Adjustment by Dissection and Orthogonal DecompositionJhay-r Lanzuela TalubanNo ratings yet
- Systems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei RenDocument8 pagesSystems & Control Letters: Peng Lin, Kaiyu Qin, Zhongkui Li, Wei Renlahoucine1984No ratings yet
- 28sici 291096 987x 2819960115 2917 3A1 3C49 3A 3aaid jcc5 3e3.0.co 3B2 0Document8 pages28sici 291096 987x 2819960115 2917 3A1 3C49 3A 3aaid jcc5 3e3.0.co 3B2 0Lata DeshmukhNo ratings yet
- 0471371459Document58 pages0471371459aldanajNo ratings yet
- Curvilinear CoordinatesDocument13 pagesCurvilinear CoordinatesJavier SernaNo ratings yet
- Interpreting Complex PDFDocument9 pagesInterpreting Complex PDFletter_ashish4444No ratings yet
- Dynamic Analysis of Multibody Systems Using Component ModesDocument10 pagesDynamic Analysis of Multibody Systems Using Component ModesSree Harsha Reddy JangaNo ratings yet
- Geographic CoordonatesDocument21 pagesGeographic CoordonatesGeorge NichiforNo ratings yet
- Cascade Structural Model Approximation of Identified State Space ModelsDocument6 pagesCascade Structural Model Approximation of Identified State Space ModelsAnonymous rTRz30fNo ratings yet
- Lecture Notes For Spacetime Geometry and General RelativityDocument33 pagesLecture Notes For Spacetime Geometry and General RelativityRahul CkNo ratings yet
- 1 Matrices and Vector SpacesDocument2 pages1 Matrices and Vector SpacesPrabhat RayNo ratings yet
- Alp Bach 2001Document26 pagesAlp Bach 2001Ulasi IfeanyiNo ratings yet
- Symmetry Breaking in Smectics and Surface Models of Their SingularitiesDocument6 pagesSymmetry Breaking in Smectics and Surface Models of Their SingularitiesAnshuman PalNo ratings yet
- Vehicle Dynamics CH 2 & 3Document96 pagesVehicle Dynamics CH 2 & 3Ashley MoreiraNo ratings yet
- Coordinate Systems 2Document8 pagesCoordinate Systems 2عمار الشيبانيNo ratings yet
- Vectors: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument26 pagesVectors: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Part 1Document96 pagesPart 1andenet100% (1)
- Novel Coordinate Transformations For Antenna Applications: IEEE Transactions On Antennas and Propagation January 1985Document7 pagesNovel Coordinate Transformations For Antenna Applications: IEEE Transactions On Antennas and Propagation January 1985serk serkNo ratings yet
- A New Theory in Stiffness Control For Dextrous ManipulationDocument9 pagesA New Theory in Stiffness Control For Dextrous Manipulationcekigad371No ratings yet
- Aa4262 05Document13 pagesAa4262 05abdelmoamen nosirNo ratings yet
- A Graphical Introduction To Survey Adjustment Dr. W. ToblerDocument17 pagesA Graphical Introduction To Survey Adjustment Dr. W. ToblerCharith ManakalNo ratings yet
- Conversion Cassin MRTDocument45 pagesConversion Cassin MRTSYAZWANI HUSNA100% (1)
- Combined Method of Datum Transformation Between Different Coordinate SystemsDocument6 pagesCombined Method of Datum Transformation Between Different Coordinate SystemsHtoo WaiNo ratings yet
- Rectangular and Polar CoordinatesDocument3 pagesRectangular and Polar CoordinatesMark Baguia DandoyNo ratings yet
- GEODESIA Y ESTÁNDARES DE EXACTITUD POSICIONAL Capitulo 4 A 8Document34 pagesGEODESIA Y ESTÁNDARES DE EXACTITUD POSICIONAL Capitulo 4 A 8CarlosNo ratings yet
- Journal of Statistical Software: Warping Functional Data in R and C Via A Bayesian Multiresolution ApproachDocument22 pagesJournal of Statistical Software: Warping Functional Data in R and C Via A Bayesian Multiresolution Approacha a aNo ratings yet
- Nonparametric Estimation of Nonstationary Spatial Covariance Structure PDFDocument13 pagesNonparametric Estimation of Nonstationary Spatial Covariance Structure PDFKrishna DindaNo ratings yet
- Resume of WGS84 & ITRFDocument3 pagesResume of WGS84 & ITRFAusa RamadhanNo ratings yet
- Introduction. Configuration Space. Equations of Motion. Velocity Phase SpaceDocument10 pagesIntroduction. Configuration Space. Equations of Motion. Velocity Phase SpaceShweta SridharNo ratings yet
- Department of ElectronicsDocument8 pagesDepartment of ElectronicsAsgher KhattakNo ratings yet
- M.N. Vrahatis Et Al - Application of The Characteristic Bisection Method For Locating and Computing Periodic Orbits in Molecular SystemsDocument16 pagesM.N. Vrahatis Et Al - Application of The Characteristic Bisection Method For Locating and Computing Periodic Orbits in Molecular SystemsMaxnamewNo ratings yet
- PC A TutorialDocument12 pagesPC A TutorialAtul AgnihotriNo ratings yet
- Position (Geometry) - WikipediaDocument16 pagesPosition (Geometry) - WikipediaNaniNo ratings yet
- Quantum Chaos in The Nuclear Collective Model: II. Peres LatticesDocument12 pagesQuantum Chaos in The Nuclear Collective Model: II. Peres LatticesBayer MitrovicNo ratings yet
- Magnetic Coordinate Systems: K.M. LaundalDocument34 pagesMagnetic Coordinate Systems: K.M. LaundalWara WaraNo ratings yet
- Spatio Temporal Kriging PDFDocument16 pagesSpatio Temporal Kriging PDFBIG BENNo ratings yet
- Determination of Modal Residues and Residual Flexibility For Time-Domain System RealizationDocument31 pagesDetermination of Modal Residues and Residual Flexibility For Time-Domain System RealizationSamagassi SouleymaneNo ratings yet
- Initial ApproximationsDocument5 pagesInitial ApproximationsRatihDwiJNo ratings yet
- 2011 BrulsArnoldCardona ASME IDETCDocument10 pages2011 BrulsArnoldCardona ASME IDETCKunheechoNo ratings yet
- From Time Series To Complex Networks The Visibility GraphDocument4 pagesFrom Time Series To Complex Networks The Visibility GraphhumejiasNo ratings yet
- Generalized Coordinates: Constraint EquationsDocument10 pagesGeneralized Coordinates: Constraint EquationsUdaya Bhanu Prakash SunkuNo ratings yet
- Genetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationDocument23 pagesGenetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationhenrydclNo ratings yet
- Lin Et Al (2013) Exact CS, BSSADocument14 pagesLin Et Al (2013) Exact CS, BSSACepi HerdiyanNo ratings yet
- 03-Built-Up SectionsDocument16 pages03-Built-Up SectionsMinn Thu NaingNo ratings yet
- Blaze HDTV Manual PDFDocument15 pagesBlaze HDTV Manual PDFMinn Thu NaingNo ratings yet
- Irrigation Engineering: 1 Chapter-1Document26 pagesIrrigation Engineering: 1 Chapter-1Minn Thu NaingNo ratings yet
- 05-Irrigation DrawingsDocument12 pages05-Irrigation DrawingsMinn Thu NaingNo ratings yet
- 02-Beams and GirdersDocument10 pages02-Beams and GirdersMinn Thu NaingNo ratings yet
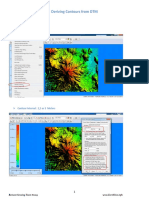
- Deriving Contour From DTMDocument2 pagesDeriving Contour From DTMMinn Thu NaingNo ratings yet
- Draft Interim Specification For Trigonometric Leveling: Network GeometryDocument4 pagesDraft Interim Specification For Trigonometric Leveling: Network GeometryMinn Thu NaingNo ratings yet
- Changes in LevelsDocument7 pagesChanges in LevelsMinn Thu NaingNo ratings yet
- Link Free Ebooks Komplit PDFDocument20 pagesLink Free Ebooks Komplit PDFMinn Thu NaingNo ratings yet
- DGPS EngDocument8 pagesDGPS EngMinn Thu NaingNo ratings yet
- How To Read A Topographic Map and Delineate A WatershedDocument4 pagesHow To Read A Topographic Map and Delineate A Watershedjojox123No ratings yet
- 1 ShouDocument22 pages1 ShouMinn Thu NaingNo ratings yet
- Observations and CalculationsDocument1 pageObservations and CalculationsMinn Thu NaingNo ratings yet
- Flow Pulses in River Shin-Julien-ASCE2011Document12 pagesFlow Pulses in River Shin-Julien-ASCE2011Minn Thu NaingNo ratings yet
- Pub58-H8 4Document7 pagesPub58-H8 4Minn Thu NaingNo ratings yet
- Lec 28-30Document24 pagesLec 28-30Minn Thu NaingNo ratings yet
- 406 237Document9 pages406 237Minn Thu NaingNo ratings yet
- WEIRSDocument38 pagesWEIRSMinn Thu NaingNo ratings yet
- 08Document14 pages08Minn Thu NaingNo ratings yet
- Crop Monitoring by Remote SensingDocument7 pagesCrop Monitoring by Remote SensingMinn Thu NaingNo ratings yet
- 446 12010165Document8 pages446 12010165Minn Thu NaingNo ratings yet
- 626 2011 Presidents Report June18Document2 pages626 2011 Presidents Report June18Minn Thu NaingNo ratings yet
- GEOSS Best Practices Area EstimationDocument11 pagesGEOSS Best Practices Area EstimationMinn Thu NaingNo ratings yet
- Crop Monitoring by Remote SensingDocument7 pagesCrop Monitoring by Remote SensingMinn Thu NaingNo ratings yet
- PDFDocument14 pagesPDFMinn Thu NaingNo ratings yet
- 608 2012 Directors Minutes Jun24 AfterDocument1 page608 2012 Directors Minutes Jun24 AfterMinn Thu NaingNo ratings yet
- 614 2011 Directors Minutes Dec1Document9 pages614 2011 Directors Minutes Dec1Minn Thu NaingNo ratings yet
- 606 2012 Directors Minutes Aug18Document7 pages606 2012 Directors Minutes Aug18Minn Thu NaingNo ratings yet
- AC Lesson LectureDocument56 pagesAC Lesson LectureMKNo ratings yet
- A Study of An Analytic Solution of 1D Heat Equation: April 21, 2019Document31 pagesA Study of An Analytic Solution of 1D Heat Equation: April 21, 2019manikandanNo ratings yet
- Advanced Econometrics: Masters ClassDocument24 pagesAdvanced Econometrics: Masters ClassBig LitresNo ratings yet
- MS 104Document588 pagesMS 104ptgoNo ratings yet
- Model Question PaperDocument2 pagesModel Question PaperDarshan BilgiNo ratings yet
- Stochastic Inventory Models: INOPER3 NotesDocument37 pagesStochastic Inventory Models: INOPER3 NotesAnorudo AguilarNo ratings yet
- Mathematics 07L Integral Calculus Differential EquationsDocument1 pageMathematics 07L Integral Calculus Differential Equationsjake luis matthewNo ratings yet
- Monotonicty Diamond and DDFV Type Finite Volume Schemes For 2D Elliptic ProblemsDocument39 pagesMonotonicty Diamond and DDFV Type Finite Volume Schemes For 2D Elliptic ProblemsmedNo ratings yet
- Bruce Jagid Resume 2Document1 pageBruce Jagid Resume 2api-521056336No ratings yet
- Uncertainties and Data Graphing - Assignment Excel InstructionsDocument16 pagesUncertainties and Data Graphing - Assignment Excel InstructionsuwuNo ratings yet
- Ruler Folding Problem PaperDocument11 pagesRuler Folding Problem PaperVishnuprakash PuthiyakovilakathNo ratings yet
- Mini ChecklistDocument2 pagesMini ChecklisttopherNo ratings yet
- Engineering Mathematics IDocument5 pagesEngineering Mathematics IAditya RaoNo ratings yet
- 1.example First Order ODEDocument9 pages1.example First Order ODEAtikah JNo ratings yet
- III-Discrete DistributionsDocument46 pagesIII-Discrete DistributionsΙσηνα ΑνησιNo ratings yet
- Taller de Vectores 2-19Document4 pagesTaller de Vectores 2-19Miguel Angel Valencia TorresNo ratings yet
- Mathematical Creativity PDFDocument2 pagesMathematical Creativity PDFRohati CakNo ratings yet
- BowersDocument23 pagesBowersАндрій ПономарьовNo ratings yet
- Square Roots: Problem 1 of 6Document6 pagesSquare Roots: Problem 1 of 6Nilam DoctorNo ratings yet
- Mathematical Modeling of Fluid SystemsDocument10 pagesMathematical Modeling of Fluid Systemsabdullah HRB100% (1)
- תקשורת ספרתית- הרצאה 6 - מסננת מתואמת, איפנון בסיסDocument40 pagesתקשורת ספרתית- הרצאה 6 - מסננת מתואמת, איפנון בסיסRonNo ratings yet
- B.tsoniff Analytical Approach To Calculation of Eigenvectors and Eigenvalues For 5x5 Impedance MatrixDocument23 pagesB.tsoniff Analytical Approach To Calculation of Eigenvectors and Eigenvalues For 5x5 Impedance MatrixtsoniffNo ratings yet
- Unit 5 Mastery ProjectDocument5 pagesUnit 5 Mastery Projectapi-709440293No ratings yet
- Advanced Optimization Techniques PDFDocument2 pagesAdvanced Optimization Techniques PDFnagsanthosh3No ratings yet
- Form 4 Additional Mathematics Chapter 8 Circular MeasureDocument9 pagesForm 4 Additional Mathematics Chapter 8 Circular MeasureBawani shanker100% (1)
- XI Important Questions - Rev-1 (1) SRTDocument3 pagesXI Important Questions - Rev-1 (1) SRTshidoNo ratings yet
- Methods of Solving (Elimination Method) : Linear EquationsDocument13 pagesMethods of Solving (Elimination Method) : Linear Equationsxslbc cdksNo ratings yet
- FSMQ Maxima and Minima PDFDocument5 pagesFSMQ Maxima and Minima PDFbenny bullNo ratings yet
- Add Math SbaDocument19 pagesAdd Math SbaJerry91% (11)