You might also like
- Ella FW 1Document16 pagesElla FW 1Carmela EllaNo ratings yet
- TraversingDocument14 pagesTraversingZaff CarrickNo ratings yet
- Surveying Engineering: Kirkuk University College of Engineering Civil EngineeringDocument11 pagesSurveying Engineering: Kirkuk University College of Engineering Civil EngineeringMustafa 609No ratings yet
- Labsheet Traverse (Survey 2)Document17 pagesLabsheet Traverse (Survey 2)Mohd Amirul NajmieNo ratings yet
- Final Field ProjectDocument7 pagesFinal Field ProjectKarl KaiNo ratings yet
- Geoinformatics LabDocument12 pagesGeoinformatics Labhamidreza shafieeNo ratings yet
- Field Work No. 1 Incremental Chord and Deflection Angle MethodDocument6 pagesField Work No. 1 Incremental Chord and Deflection Angle MethodElline FernandoNo ratings yet
- Field Work No. 8 Determination of The Height of A Remote PointDocument10 pagesField Work No. 8 Determination of The Height of A Remote PointJawahir GomezNo ratings yet
- Report Land SurveyDocument14 pagesReport Land SurveySyedjamelNo ratings yet
- Fieldwork 8Document8 pagesFieldwork 8Icko GonzalesNo ratings yet
- Geomatic Engineering: Lab ReportDocument8 pagesGeomatic Engineering: Lab ReportHati Saya50% (2)
- Total Station: Lecturers: Berchuk V.Y. Gutareva N.YDocument15 pagesTotal Station: Lecturers: Berchuk V.Y. Gutareva N.YvilmoskaNo ratings yet
- Surveying LabDocument15 pagesSurveying Labzarakkhan masoodNo ratings yet
- Lab Report v2 New EditedDocument12 pagesLab Report v2 New EditedMuhammad khairinNo ratings yet
- Discussion Result 2023Document17 pagesDiscussion Result 2023milimofdemonlordNo ratings yet
- Report Ukur ArasDocument25 pagesReport Ukur ArasMuhammad AimiNo ratings yet
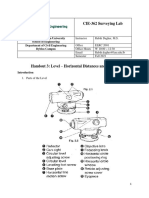
- Handout 3 Level - Horizontal Distances and AnglesDocument4 pagesHandout 3 Level - Horizontal Distances and AnglesTheresa DaherNo ratings yet
- Multistation Ex 03Document9 pagesMultistation Ex 03AHMED SAKIB 1807005No ratings yet
- Fieldwork 4 (Final)Document15 pagesFieldwork 4 (Final)Anthony Mark DulayNo ratings yet
- Surveying Fieldwork 3 Determination of AnglesDocument3 pagesSurveying Fieldwork 3 Determination of Anglesjohn.moslaresNo ratings yet
- Survey Lab 5 FormDocument16 pagesSurvey Lab 5 FormFikrilAzimAbdulSani100% (1)
- Total StationDocument15 pagesTotal StationDream zone EngineeringNo ratings yet
- Fieldwork ReportDocument9 pagesFieldwork ReportWong Kiong LeeNo ratings yet
- Practical Report Gls 160Document22 pagesPractical Report Gls 160MOHAMMAD FIRDAUS MOHAMMAD ZAMANINo ratings yet
- Fieldwork #6: Area Determination ConclusionDocument3 pagesFieldwork #6: Area Determination ConclusionShaenaBalaodelRosarioNo ratings yet
- Lab 4 Traverse by Total Station Instrument Group 4 Ecg422 1a2aDocument20 pagesLab 4 Traverse by Total Station Instrument Group 4 Ecg422 1a2aNoradila RoslanNo ratings yet
- Report Ukur ArasDocument25 pagesReport Ukur ArasMuhammad AimiNo ratings yet
- Advanced Surveying Lab PDFDocument88 pagesAdvanced Surveying Lab PDFAparna SharmaNo ratings yet
- Field Work 6 Regencia PDFDocument13 pagesField Work 6 Regencia PDFiceNo ratings yet
- Sample Geomatic Lab Report (Traverse)Document31 pagesSample Geomatic Lab Report (Traverse)Logarithem54% (13)
- Lab 2 Determination of Angle, Distance and Bearing Group 4 Ecg422 1a2aDocument18 pagesLab 2 Determination of Angle, Distance and Bearing Group 4 Ecg422 1a2aNoradila RoslanNo ratings yet
- Dronacharya Group of Institutions, Greater Noida Department of CIVIL Engineering Semester: III Branch: CIVIL Session: 2015-16 Subject: Surveying LabDocument13 pagesDronacharya Group of Institutions, Greater Noida Department of CIVIL Engineering Semester: III Branch: CIVIL Session: 2015-16 Subject: Surveying LabVinay YadavNo ratings yet
- Ce3512 Survey Camp-1Document15 pagesCe3512 Survey Camp-1C.V. SHARMAHNo ratings yet
- Civil Engineering Department Lab ManualDocument105 pagesCivil Engineering Department Lab Manualubaid quaziNo ratings yet
- Determining The Pointing Offset of A 4m Radio TelescopeDocument10 pagesDetermining The Pointing Offset of A 4m Radio TelescopeMayukh NathNo ratings yet
- Ce120-0f Field Work 11Document14 pagesCe120-0f Field Work 11Calvin Paulo Mondejar100% (1)
- Fieldwork 5Document5 pagesFieldwork 5Andrei ViloriaNo ratings yet
- Total Station Instrument: Unit 1Document56 pagesTotal Station Instrument: Unit 1shreedevi100% (2)
- Total StationDocument5 pagesTotal StationTapas Singh100% (1)
- Sbeq2632 Group 10 Traverse Survey Report PDFDocument18 pagesSbeq2632 Group 10 Traverse Survey Report PDFsharifahnadiah02No ratings yet
- Lab 1 - GE 414 - AGNERDocument5 pagesLab 1 - GE 414 - AGNERRochie Mae LuceroNo ratings yet
- Bec 102 Engineering Survey ReportDocument12 pagesBec 102 Engineering Survey ReportMusk BengshengNo ratings yet
- Traverse ReportDocument11 pagesTraverse ReportMohd Riezhuan RabaNiNo ratings yet
- SurveyDocument2 pagesSurveyandrewhussein549No ratings yet
- Field Work No. 8 Determination of The Height of A Remote PointDocument9 pagesField Work No. 8 Determination of The Height of A Remote PointMikaella TambisNo ratings yet
- Field Work No 11Document13 pagesField Work No 11Geo Gregorio100% (1)
- Surveying Lab ReportDocument12 pagesSurveying Lab ReportAmmar MddeniNo ratings yet
- Traverse SurveyDocument9 pagesTraverse SurveyIkhwan JoniNo ratings yet
- Survey Lab Manual - DiplomaDocument8 pagesSurvey Lab Manual - DiplomaSagar Mandaleeka100% (1)
- C-409 SP3 Work BookDocument67 pagesC-409 SP3 Work BookStudio StadiesNo ratings yet
- Group#11 - Laboratory Work #2 - Total StationDocument8 pagesGroup#11 - Laboratory Work #2 - Total StationDias MukhanovNo ratings yet
- PROJECT Report Sample of Survey Camp PDFDocument21 pagesPROJECT Report Sample of Survey Camp PDF852886117978% (27)
- EDM (Survey Camp)Document5 pagesEDM (Survey Camp)Mohamad Syafiq0% (1)
- Report Traverse PDFDocument7 pagesReport Traverse PDFliyana203050% (2)
- Site Survey PresentationDocument24 pagesSite Survey PresentationAmir HafizuddinNo ratings yet
- Field Work 1: TachimetryDocument13 pagesField Work 1: TachimetryeyuyazmiNo ratings yet
- Setting Out ReportDocument7 pagesSetting Out ReportMohamadRosli25% (4)
- Marking SchemaDocument4 pagesMarking Schemaapi-318297366No ratings yet
- Sun and Earth Modern User Reference Guide: Determining earth’s true surface shape as flat using the sunFrom EverandSun and Earth Modern User Reference Guide: Determining earth’s true surface shape as flat using the sunNo ratings yet
- LN49Document198 pagesLN49Đạt NguyễnNo ratings yet
- Affiliate Application Form: Membership Number (Imarest Office Use Only)Document3 pagesAffiliate Application Form: Membership Number (Imarest Office Use Only)alireza_vatandoustNo ratings yet
- Dem Case StudyDocument4 pagesDem Case StudyChandra Aji SaputraNo ratings yet
- Alexander The Greatest EssayDocument5 pagesAlexander The Greatest EssayMatt GoffNo ratings yet
- Thunder Rift Module PDFDocument37 pagesThunder Rift Module PDFtroy_banks100% (1)
- Major Deserts of Asia Thar Desert Climate Life of The People InformationDocument3 pagesMajor Deserts of Asia Thar Desert Climate Life of The People InformationJasvinder SinghNo ratings yet
- Ally Condie - CrossedDocument0 pagesAlly Condie - CrossedKarina Castro25% (4)
- BATANESDocument3 pagesBATANESBryzza ManulatNo ratings yet
- English Sa 2 - V ClassDocument21 pagesEnglish Sa 2 - V ClassVandana RawatNo ratings yet
- Transit Oriented DevelopmentDocument6 pagesTransit Oriented DevelopmentParis GeronimoNo ratings yet
- Concept PaperDocument2 pagesConcept PaperChristine SeriosaNo ratings yet
- Geography of TourismDocument155 pagesGeography of TourismThompson E IghaloNo ratings yet
- Tapilon Sketch PlanDocument1 pageTapilon Sketch PlanKurt Laurhon CabahugNo ratings yet
- Puhlhofer and Another V Hillingdon London BoDocument14 pagesPuhlhofer and Another V Hillingdon London BoOkeeto DaSilvaNo ratings yet
- Exam Specifications - PS Supplied ReferencesDocument24 pagesExam Specifications - PS Supplied ReferencesDime CeselkoskiNo ratings yet
- Camfield OverviewDocument9 pagesCamfield OverviewRangga Wirawan GausNo ratings yet
- Computer Aided Simulation of Open Pit Slope Stability: Title: Literature ReviewDocument6 pagesComputer Aided Simulation of Open Pit Slope Stability: Title: Literature ReviewDakshith Ruvin WijesingheNo ratings yet
- Scope: Mt. Taltak Reforestation Project-Flora AssessmentDocument12 pagesScope: Mt. Taltak Reforestation Project-Flora AssessmentJB BaybayonNo ratings yet
- Gust FactorDocument4 pagesGust FactorShekh Muhsen Uddin AhmedNo ratings yet
- Copenhagen Climate Adaptation Plan - 2011 PDFDocument100 pagesCopenhagen Climate Adaptation Plan - 2011 PDFMarinera Del MarNo ratings yet
- Chapter 5.3rDocument16 pagesChapter 5.3rLampard ChenNo ratings yet
- Groundwater Modelling in Bina River Basin, India Using Visual ModflowDocument5 pagesGroundwater Modelling in Bina River Basin, India Using Visual ModflowRanchoNo ratings yet
- Anup Saikia Over-Exploitation of Forests A Case Study From North East India 2014Document77 pagesAnup Saikia Over-Exploitation of Forests A Case Study From North East India 2014Mukesh Kumar SinghNo ratings yet
- Joint InversionDocument9 pagesJoint InversionarshinNo ratings yet
- 1865 Taylor Travels in KurdistanDocument45 pages1865 Taylor Travels in KurdistanZeynep OguzNo ratings yet
- BingMapsRESTServices PDFDocument453 pagesBingMapsRESTServices PDFFaiTh Imba FoNgNo ratings yet
- Who Really Discovered America?Document16 pagesWho Really Discovered America?Frank Nic. BazsikaNo ratings yet
- Plant Diversity in The Valmiki RamayanaDocument73 pagesPlant Diversity in The Valmiki RamayanaJitendra SinghNo ratings yet
- De Thi Tuyen Sinh Vao Lop 10 Mon Tieng Anh Nam Hoc 2016 2017 Tinh Phu ThoDocument3 pagesDe Thi Tuyen Sinh Vao Lop 10 Mon Tieng Anh Nam Hoc 2016 2017 Tinh Phu ThoAn NguyenNo ratings yet
- Cebu City Engineering 3-YEAR PROGRAMDocument77 pagesCebu City Engineering 3-YEAR PROGRAMCebuDailyNewsNo ratings yet