You might also like
- 2 Gear BasicsDocument6 pages2 Gear BasicsMohamed Adel RizkNo ratings yet
- Introduction To Direct Gear DesignDocument15 pagesIntroduction To Direct Gear DesignburaktuncerNo ratings yet
- KissSoft Article GearAnalysisAndOptimization PDFDocument12 pagesKissSoft Article GearAnalysisAndOptimization PDFeng13No ratings yet
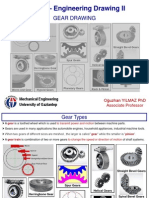
- Gear Drawing PDFDocument12 pagesGear Drawing PDFpradeep315No ratings yet
- Face Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannDocument8 pagesFace Gears: Geometry and Strength: Ulrich Kissling and Stefan BeermannosaniamecNo ratings yet
- GearsDocument14 pagesGearsZulhilmi Chik TakNo ratings yet
- Gear 1Document9 pagesGear 1Ariyant CreativeNo ratings yet
- Addendum Modified Gear For An All-Terrain Vehicle GearboxDocument6 pagesAddendum Modified Gear For An All-Terrain Vehicle GearboxIJRASETPublicationsNo ratings yet
- Fabrication of Gear Type Injection Moulding AchineDocument29 pagesFabrication of Gear Type Injection Moulding AchineAnonymous ITnkbIEF75% (4)
- Minimization of Warpage and Sink Index in InjectionDocument6 pagesMinimization of Warpage and Sink Index in InjectionS-HafizNomanNo ratings yet
- Low Node DensityDocument22 pagesLow Node Densityanu swamiNo ratings yet
- Input Parameters: Compartment With Thermally Thick/Thin BoundariesDocument3 pagesInput Parameters: Compartment With Thermally Thick/Thin BoundariesgfgfNo ratings yet
- A880gm-Ad3 V10Document78 pagesA880gm-Ad3 V10Pramu Jaya FirstwobandNo ratings yet
- Kisssoft Changelog Version 2020 - Service Pack 4: WrongDocument14 pagesKisssoft Changelog Version 2020 - Service Pack 4: WrongpasswordNo ratings yet
- PolymersDocument35 pagesPolymersYash AwatadeNo ratings yet
- GEARSDocument25 pagesGEARSamitNo ratings yet
- Name: Roll No: AssignmentDocument6 pagesName: Roll No: Assignmentigualdi53No ratings yet
- Introduction To Gear DesignDocument35 pagesIntroduction To Gear DesignAsela Bollegala100% (1)
- Gear DesignDocument83 pagesGear DesignmuhammadaminjamalmutNo ratings yet
- Gear Teeth: Clocks and ShipsDocument16 pagesGear Teeth: Clocks and ShipsČika BrkoNo ratings yet
- Project Kissoft TDODocument24 pagesProject Kissoft TDOJoseNo ratings yet
- Cycloid Drive - Replaced by Planocentric Involute Gearing PDFDocument6 pagesCycloid Drive - Replaced by Planocentric Involute Gearing PDFMax GrandeNo ratings yet
- Gear Tooth ProfileDocument5 pagesGear Tooth ProfilepremnathgopinathanNo ratings yet
- Involute Spur GearDocument7 pagesInvolute Spur GeardhimanrayatNo ratings yet
- Types of GearsDocument22 pagesTypes of GearsAnonymous 2RbW9dNo ratings yet
- Cycloid Drive - Replaced by Planocentric Involute GearingDocument6 pagesCycloid Drive - Replaced by Planocentric Involute GearingMax GrandeNo ratings yet
- Kisssoft Tut 015 E BevelgearDocument24 pagesKisssoft Tut 015 E BevelgearDejan DrumacNo ratings yet
- Power Skiving PDFDocument11 pagesPower Skiving PDFmadhavikNo ratings yet
- Kisssoft Tut 015 E BevelgearDocument22 pagesKisssoft Tut 015 E BevelgearJorge Ronald Cabrera ÑaupaNo ratings yet
- How To Measure The Pressure Angle of A Physical Spur GearDocument16 pagesHow To Measure The Pressure Angle of A Physical Spur Gearian_new100% (2)
- Gear TrainDocument16 pagesGear Trainmudassir habibNo ratings yet
- B.1.1 Spur Gears With Gearwheels-10Document34 pagesB.1.1 Spur Gears With Gearwheels-10Ganapathy Subramaniam100% (1)
- Gear Tester, Gear Measuring Machines, Gear Inspection MachinesDocument8 pagesGear Tester, Gear Measuring Machines, Gear Inspection MachinesPramod Patil100% (1)
- Chapter 2-Gear SystemDocument26 pagesChapter 2-Gear SystemNui Yuhu KuwNo ratings yet
- Injection MoldingDocument25 pagesInjection MoldingHarshadNo ratings yet
- Runner SystemsDocument12 pagesRunner SystemsEko Fransiskus PakpahanNo ratings yet
- Kisssoft Tut 016 E WormgearDocument16 pagesKisssoft Tut 016 E WormgearIbraheem KhressNo ratings yet
- UNIT-2 Design of Spur GearDocument56 pagesUNIT-2 Design of Spur GearMarthandeNo ratings yet
- Gear TrainDocument26 pagesGear TraingowthamarajNo ratings yet
- Tooth ThicknessDocument9 pagesTooth ThicknessPraveen VundrajavarapuNo ratings yet
- Gear Trax 2007Document69 pagesGear Trax 2007fbrissoNo ratings yet
- CH 13Document27 pagesCH 13Sanjay KumarNo ratings yet
- Module IV: Gears and Gear TrainsDocument38 pagesModule IV: Gears and Gear TrainsSuraj VinayNo ratings yet
- Your Source For GD&T Training and MaterialsDocument6 pagesYour Source For GD&T Training and Materialskharsh23No ratings yet
- Gears - Engineering InformationDocument138 pagesGears - Engineering InformationGiang T LeNo ratings yet
- Gears, Splines, and Serrations: Unit 24Document8 pagesGears, Splines, and Serrations: Unit 24Satish Dhandole100% (1)
- CH3 Worm Gear Design-1Document38 pagesCH3 Worm Gear Design-1Abaziz Mousa OutlawZzNo ratings yet
- Kisssoft Tut 006 E Shaft EditorDocument11 pagesKisssoft Tut 006 E Shaft EditorBeytullah AcarNo ratings yet
- Boston Gear Helical GearsDocument14 pagesBoston Gear Helical GearssandchiNo ratings yet
- Spur and Helical Gear Modeling in Pro-EDocument13 pagesSpur and Helical Gear Modeling in Pro-Ek_udhay100% (1)
- Production Technology (IV Sem)Document24 pagesProduction Technology (IV Sem)Shubham AgrawalNo ratings yet
- Spur GearsDocument8 pagesSpur GearstopjobNo ratings yet
- Optimization of Gear Reduction Unit Through Ray DiagramDocument7 pagesOptimization of Gear Reduction Unit Through Ray Diagramأحمد دعبس100% (1)
- Din 3967-1978 EngDocument24 pagesDin 3967-1978 EngLatha Pundi100% (4)
- GearDocument31 pagesGearzaheer100% (2)
- Spline DesignDocument5 pagesSpline DesignRuchira Chanda Indu100% (2)
- Modelling Tooth-Shape Errors Using Random Variables: Ŕ Periodica PolytechnicaDocument6 pagesModelling Tooth-Shape Errors Using Random Variables: Ŕ Periodica PolytechnicaJigar M. UpadhyayNo ratings yet
- Long Addendum Gears 1946Document15 pagesLong Addendum Gears 1946Marco ViniciusNo ratings yet
- How Backlash Affects GearsDocument15 pagesHow Backlash Affects GearsMohammad Ali TaghdiriNo ratings yet
- WCE2011 pp2361-2363Document3 pagesWCE2011 pp2361-2363yanni73No ratings yet
- Open Mathematics: Black-Scholes Equation and The Delta Hedge of The European Option Under Skew Brownian MotionDocument10 pagesOpen Mathematics: Black-Scholes Equation and The Delta Hedge of The European Option Under Skew Brownian MotionDavide MaranoNo ratings yet
- CHENG Gear Tooth GeometryDocument11 pagesCHENG Gear Tooth GeometryDavide MaranoNo ratings yet
- Open Mathematics: Statistical ($/alpha ,/varphi) $-ConnectionsDocument11 pagesOpen Mathematics: Statistical ($/alpha ,/varphi) $-ConnectionsDavide MaranoNo ratings yet
- Research Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDocument10 pagesResearch Article: Model Reduction of The Flexible Rotating Crankshaft of A Motorcycle Engine CranktrainDavide MaranoNo ratings yet
- 8 ?5 @A7 Ÿ B Cadÿ Efÿ 7 G67 5:Ÿ Ehbf Hfÿ: 8Ÿ Eiÿ ?5 at Ÿ K:?Ÿ Elÿ 7 G67 5:Ÿ EhbfDocument2 pages8 ?5 @A7 Ÿ B Cadÿ Efÿ 7 G67 5:Ÿ Ehbf Hfÿ: 8Ÿ Eiÿ ?5 at Ÿ K:?Ÿ Elÿ 7 G67 5:Ÿ EhbfDavide MaranoNo ratings yet
- Sound System Design - 1Document89 pagesSound System Design - 1Davide MaranoNo ratings yet
- My Foolish Heart Transcript PDFDocument3 pagesMy Foolish Heart Transcript PDFDavide Marano100% (1)
- Modeling of A Three-Axes MEMS Gyroscope With Feedforward PI Quadrature CompensationDocument10 pagesModeling of A Three-Axes MEMS Gyroscope With Feedforward PI Quadrature CompensationDavide MaranoNo ratings yet
- Rating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDocument6 pagesRating of Asymmetric Tooth Gears: Alex L. Kapelevich and Yuriy V. ShekhtmanDavide MaranoNo ratings yet
- GT 0916Document84 pagesGT 0916Davide MaranoNo ratings yet
- U2 04 04Document30 pagesU2 04 04Davide MaranoNo ratings yet
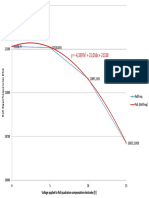
- Roll Eigenfrequencies Interpolation: Voltage Applied To Roll Quadrature Compensation Electrodes (V)Document1 pageRoll Eigenfrequencies Interpolation: Voltage Applied To Roll Quadrature Compensation Electrodes (V)Davide MaranoNo ratings yet
- Mems TransducersDocument21 pagesMems TransducersDavide MaranoNo ratings yet
- Odeon ManualDocument195 pagesOdeon ManualDavide MaranoNo ratings yet
- Model Answer Winter 2019Document9 pagesModel Answer Winter 2019Mohit D MoreNo ratings yet
- SW EQ6-R Backlash AdjustmentDocument4 pagesSW EQ6-R Backlash AdjustmentStarks GazerNo ratings yet
- Final Driver Europa Regler 1115-4G 14 PoleDocument20 pagesFinal Driver Europa Regler 1115-4G 14 PoleSergei Kurpish100% (2)
- Kraz 255 BDocument10 pagesKraz 255 Bgokulmane117No ratings yet
- Yamaha YFM7FGPWDocument495 pagesYamaha YFM7FGPWD-rek Brads0% (1)
- RearAxleDifferential RT 46 164PDocument94 pagesRearAxleDifferential RT 46 164PFernandoNo ratings yet
- GearsDocument22 pagesGearsAnurag MidhaNo ratings yet
- 2011 2013 Mercury 150 Manual Ber2koDocument584 pages2011 2013 Mercury 150 Manual Ber2koChris ArampatzisNo ratings yet
- TOHATSU 4B-5B-6B E Service ManualDocument260 pagesTOHATSU 4B-5B-6B E Service ManualBart100% (1)
- (CIMON) PLC-S CPU Built-In Positioning User ManualDocument60 pages(CIMON) PLC-S CPU Built-In Positioning User ManualRolando Nunez del Prado B.No ratings yet
- Aerotech Engineering ReferenceDocument39 pagesAerotech Engineering ReferenceKobeNo ratings yet
- Sliding Mode Controller Design For Controlling The Speed of A DC MotorDocument5 pagesSliding Mode Controller Design For Controlling The Speed of A DC Motorbokic88No ratings yet
- LG958L Training Material: Chapter V Drive AxleDocument36 pagesLG958L Training Material: Chapter V Drive AxleGeorge Jhonson100% (1)
- The Integrated Balancer Shaft System of The New BMW Four-Cylinder Diesel EngineDocument6 pagesThe Integrated Balancer Shaft System of The New BMW Four-Cylinder Diesel EngineZhihai DengNo ratings yet
- Bln-10169 Phased Out I Jan-1999 Rev BDocument18 pagesBln-10169 Phased Out I Jan-1999 Rev BgaryNo ratings yet
- Ug 8,10Document56 pagesUg 8,10Thien Nguyễn100% (1)
- Screw Jacks 0608Document58 pagesScrew Jacks 0608Szabo CsabaNo ratings yet
- Eon Series: Installation, Operation & Maintenance ManualDocument38 pagesEon Series: Installation, Operation & Maintenance ManualA SuhardimanNo ratings yet
- Kneader AnalysisDocument12 pagesKneader AnalysisSubhransu MohapatraNo ratings yet
- Brother PT-9200pc Service ManualDocument93 pagesBrother PT-9200pc Service ManualDuplessisNo ratings yet
- Assembly - M26ADocument5 pagesAssembly - M26AGabriel QuijadaNo ratings yet
- 416F2 Center Pivot Backhoe Loader LBF00001-UP Differential Backlash and Bearings - AdjustDocument15 pages416F2 Center Pivot Backhoe Loader LBF00001-UP Differential Backlash and Bearings - AdjustCEVegaONo ratings yet
- MerecnikDocument12 pagesMerecnikjalijaNo ratings yet
- Rack-And-Pinion or Screw Driven SystemDocument2 pagesRack-And-Pinion or Screw Driven Systemnima_matrix20028550No ratings yet
- RDWorks V8.0 User ManualDocument64 pagesRDWorks V8.0 User ManualLeibniz GriegNo ratings yet
- Rear Axle 1994 Volvo 960 SamosvorDocument19 pagesRear Axle 1994 Volvo 960 Samosvoraaa222No ratings yet
- SL-ES-221-Ver03 Shovel Hoist Drum Gear Alignment ProcedureDocument60 pagesSL-ES-221-Ver03 Shovel Hoist Drum Gear Alignment ProcedurePedro Leyton CortesNo ratings yet
- Tm-Ze260 Tm-Ze540 Tm-Ze290 Tm-Ze550 Tm-Ze300 Tm-Ze360 TM-ZR820 Tm-Ze500 SL-150Document214 pagesTm-Ze260 Tm-Ze540 Tm-Ze290 Tm-Ze550 Tm-Ze300 Tm-Ze360 TM-ZR820 Tm-Ze500 SL-150Matias Contreras Köbrich100% (1)
- ProLIGHT 2000 Maintenance ManualDocument19 pagesProLIGHT 2000 Maintenance ManualmegclayNo ratings yet
- RDWork8.0 User ManualDocument66 pagesRDWork8.0 User ManualKovácsZsoltNo ratings yet