You might also like
- Numerical Analysis Lecture NotesDocument72 pagesNumerical Analysis Lecture NotesZhenhuan SongNo ratings yet
- Problems by Jim Pitman. Solutions by George ChenDocument8 pagesProblems by Jim Pitman. Solutions by George ChenspitzersglareNo ratings yet
- Special Eigenfunctions For The Ruijsenaars Operator: Yosuke SaitoDocument24 pagesSpecial Eigenfunctions For The Ruijsenaars Operator: Yosuke Saitoapi-225890336No ratings yet
- Lec 12Document6 pagesLec 12spitzersglareNo ratings yet
- Taylorov red i numeričke metodeDocument13 pagesTaylorov red i numeričke metodeHinko FušNo ratings yet
- Nonlinear Equations: + 3x (X) 0 Sin (X) 4 + Sin (2x) + 6x + 9 0Document19 pagesNonlinear Equations: + 3x (X) 0 Sin (X) 4 + Sin (2x) + 6x + 9 0fahadkhanffcNo ratings yet
- Introduction To Spectral Methods: Eric GourgoulhonDocument48 pagesIntroduction To Spectral Methods: Eric Gourgoulhonmanu2958No ratings yet
- Annecy Del Moral MTTDocument48 pagesAnnecy Del Moral MTTPaola AndreaNo ratings yet
- Lecture 19: Stationary Markov ChainsDocument4 pagesLecture 19: Stationary Markov ChainsspitzersglareNo ratings yet
- Textbook Solutions 2.1-2.5Document3 pagesTextbook Solutions 2.1-2.51plus12No ratings yet
- On The Application of A Newton Raphson'S Iterative Method of The Fixed Point Theory To The Solution of A Chemical Equilibrium ProblemDocument20 pagesOn The Application of A Newton Raphson'S Iterative Method of The Fixed Point Theory To The Solution of A Chemical Equilibrium ProblemjejomarNo ratings yet
- On Integral Representations of Q - Gamma and Q-Beta FunctionsDocument16 pagesOn Integral Representations of Q - Gamma and Q-Beta FunctionsNaser KanderyNo ratings yet
- Lévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Document17 pagesLévy Stable Probability Laws, Lévy Flights, Space-Fractional Diffusion and Kinetic Equations (Two Lectures)Dony HidayatNo ratings yet
- Partial Differential Equations Example Sheet 1: BooksDocument6 pagesPartial Differential Equations Example Sheet 1: BooksNasih AhmadNo ratings yet
- Introduction To Time Series Analysis. Lecture 8Document35 pagesIntroduction To Time Series Analysis. Lecture 8anon_529685544No ratings yet
- Polynomial and spline data fitting techniques for function approximationDocument33 pagesPolynomial and spline data fitting techniques for function approximationBachir El Fil100% (1)
- Function Approximation, Interpolation, and Curve Fitting PDFDocument53 pagesFunction Approximation, Interpolation, and Curve Fitting PDFMikhail Tabucal100% (1)
- OprisanDocument8 pagesOprisanLovinf FlorinNo ratings yet
- Tutorial 5 So LNDocument10 pagesTutorial 5 So LNBobNo ratings yet
- Math 206 Take Home Finalv3Document2 pagesMath 206 Take Home Finalv3Patrick TamNo ratings yet
- (29-35) A Unique Common Fixed Point Theorem Under Psi Varphi Contractive Condition in Partial Metric Spaces Using Rational ExpressionsDocument8 pages(29-35) A Unique Common Fixed Point Theorem Under Psi Varphi Contractive Condition in Partial Metric Spaces Using Rational ExpressionsAlexander DeckerNo ratings yet
- Orthogonal P-Wavelets On R: + Yu.A. FarkovDocument23 pagesOrthogonal P-Wavelets On R: + Yu.A. FarkovukoszapavlinjeNo ratings yet
- Homework 2 SolutionsDocument6 pagesHomework 2 SolutionsislayerNo ratings yet
- Generating FunctionsDocument6 pagesGenerating FunctionsEverton ArtusoNo ratings yet
- Predicting ARMA Processes: T T 2 T TDocument8 pagesPredicting ARMA Processes: T T 2 T TVidaup40No ratings yet
- Lagrange Remainder PDFDocument1 pageLagrange Remainder PDFChris BakamNo ratings yet
- Ortho PolyDocument20 pagesOrtho PolyRenganathanMuthuswamyNo ratings yet
- MA 2213 Numerical Analysis I: Additional TopicsDocument22 pagesMA 2213 Numerical Analysis I: Additional Topicsyewjun91No ratings yet
- Review1 PDFDocument22 pagesReview1 PDFdNo ratings yet
- Calculus FormulaDocument2 pagesCalculus FormulaleeshiNo ratings yet
- QM1 3Document5 pagesQM1 3waratore1No ratings yet
- Understanding key convergence concepts in probabilityDocument17 pagesUnderstanding key convergence concepts in probabilityOsho AgrawalNo ratings yet
- Probabilistic Method 6Document6 pagesProbabilistic Method 6johnoftheroadNo ratings yet
- Chapter 6Document52 pagesChapter 6Allen AllenNo ratings yet
- Series TableDocument1 pageSeries TableTsatsaa TstsNo ratings yet
- Formula RioDocument1 pageFormula RioEliud González VázquezNo ratings yet
- Math Formulas: Arithmetic and Geometric Series: NotationDocument4 pagesMath Formulas: Arithmetic and Geometric Series: Notationtdzida26No ratings yet
- 1 Analytic FunctionDocument3 pages1 Analytic FunctionrobNo ratings yet
- Taylor Series: N 0 N N NDocument6 pagesTaylor Series: N 0 N N NtylonNo ratings yet
- 5 The Stochastic Approximation Algorithm: 5.1 Stochastic Processes - Some Basic ConceptsDocument14 pages5 The Stochastic Approximation Algorithm: 5.1 Stochastic Processes - Some Basic ConceptsAaa MmmNo ratings yet
- Orthogonal BasisDocument30 pagesOrthogonal BasisApel_Apel_KingNo ratings yet
- The Fokker-Planck Equation ExplainedDocument12 pagesThe Fokker-Planck Equation ExplainedslamNo ratings yet
- 1 Iterative Methods For Linear Systems 2 Eigenvalues and EigenvectorsDocument2 pages1 Iterative Methods For Linear Systems 2 Eigenvalues and Eigenvectorsbohboh1212No ratings yet
- Nonlinear Solvers GuideDocument14 pagesNonlinear Solvers GuideRasheed KibriaNo ratings yet
- Conditional Least Squares Estimation in Nonlinear and Nonstationary Stochastic Regression ModelsDocument27 pagesConditional Least Squares Estimation in Nonlinear and Nonstationary Stochastic Regression ModelsdayumNo ratings yet
- Differnetial Equation Cheat SheetDocument5 pagesDiffernetial Equation Cheat SheetDebayan Dasgupta100% (4)
- DSP SlidesDocument100 pagesDSP SlidesBrass BoyNo ratings yet
- Combes - An Introduction To Stochastic Approximation - 2013Document9 pagesCombes - An Introduction To Stochastic Approximation - 2013johanNo ratings yet
- Subharmonic Solutions of Bounded Coupled Hamiltonian Systems With Sublinear GrowthDocument18 pagesSubharmonic Solutions of Bounded Coupled Hamiltonian Systems With Sublinear GrowthQian DingbianNo ratings yet
- 18.781 Homework 4: Due: 4th March 2014Document3 pages18.781 Homework 4: Due: 4th March 2014Johannah AlinorNo ratings yet
- Compound Poisson Distribution Limit TheoremDocument6 pagesCompound Poisson Distribution Limit TheoremNamdevNo ratings yet
- Material: Glad & Ljung Ch. 12.2 Khalil Ch. 4.1-4.3 Lecture NotesDocument42 pagesMaterial: Glad & Ljung Ch. 12.2 Khalil Ch. 4.1-4.3 Lecture NotesArun JerardNo ratings yet
- FormulaDocument7 pagesFormulaMàddìRèxxShìrshírNo ratings yet
- On the difference π (x) − li (x) : Christine LeeDocument41 pagesOn the difference π (x) − li (x) : Christine LeeKhokon GayenNo ratings yet
- Newton Iteration and Polynomial Computation:: Algorithms Professor John ReifDocument12 pagesNewton Iteration and Polynomial Computation:: Algorithms Professor John Reifraw.junkNo ratings yet
- Ee132b Hw2 SolDocument5 pagesEe132b Hw2 SolAhmed HassanNo ratings yet
- UCLA Math Problems on Fourier SeriesDocument4 pagesUCLA Math Problems on Fourier Seriesmichael_deguzman_1No ratings yet
- Limiting average cost control problems in stochastic systemsDocument13 pagesLimiting average cost control problems in stochastic systemsLuis Alberto FuentesNo ratings yet
- Maulina Putri Lestari - M0220052 - Tugas 3Document10 pagesMaulina Putri Lestari - M0220052 - Tugas 3Maulina Putri LestariNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- ING Think Rates Spark Shifting GroundsDocument6 pagesING Think Rates Spark Shifting GroundsbobmezzNo ratings yet
- Towards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010Document19 pagesTowards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010bobmezzNo ratings yet
- FX Talking: Some Stark DivergenceDocument15 pagesFX Talking: Some Stark DivergencebobmezzNo ratings yet
- 1 IEOR 4701: Continuous-Time Markov ChainsDocument22 pages1 IEOR 4701: Continuous-Time Markov ChainsbobmezzNo ratings yet
- c1Document68 pagesc1dey_zicoNo ratings yet
- Applied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014Document32 pagesApplied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014bobmezzNo ratings yet
- The Convexity Maven: "Building A Better Volatility Mousetrap"Document13 pagesThe Convexity Maven: "Building A Better Volatility Mousetrap"bobmezzNo ratings yet
- 4703 07 Notes PP NSPPDocument9 pages4703 07 Notes PP NSPPМилан МишићNo ratings yet
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocument26 pagesTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNo ratings yet
- Pca Portfolio SelectionDocument18 pagesPca Portfolio Selectionluli_kbreraNo ratings yet
- 1 Discrete-Time Markov ChainsDocument7 pages1 Discrete-Time Markov ChainsbobmezzNo ratings yet
- A Tutorial On Principal Component AnalysisDocument12 pagesA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNo ratings yet
- Learning from interest rate implied volatilitiesDocument85 pagesLearning from interest rate implied volatilitiesbobmezzNo ratings yet
- 1 Communication Classes and Irreducibility For Markov ChainsDocument8 pages1 Communication Classes and Irreducibility For Markov ChainsbobmezzNo ratings yet
- Statistical Properties of Forward Libor RatesDocument33 pagesStatistical Properties of Forward Libor RatesbobmezzNo ratings yet
- A Tutorial On Principal Component AnalysisDocument12 pagesA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNo ratings yet
- Global Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmDocument23 pagesGlobal Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmbobmezzNo ratings yet
- GARCH Models in Python 1Document31 pagesGARCH Models in Python 1visNo ratings yet
- Siegel ParadoxDocument4 pagesSiegel ParadoxbobmezzNo ratings yet
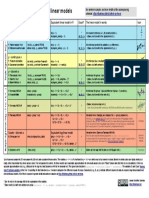
- Common Statistical Tests Are Linear ModelsDocument1 pageCommon Statistical Tests Are Linear ModelsbobmezzNo ratings yet
- Berenberg Global ForecastsDocument15 pagesBerenberg Global ForecastsbobmezzNo ratings yet
- FX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?Document15 pagesFX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?bobmezzNo ratings yet
- Measuring cross-gamma riskDocument16 pagesMeasuring cross-gamma riskbobmezzNo ratings yet
- Derivatives Across Asset ClassesDocument59 pagesDerivatives Across Asset ClassesbobmezzNo ratings yet
- Market Volatility BulletinDocument28 pagesMarket Volatility BulletinbobmezzNo ratings yet
- Global Cycle Notes Hope Springs EternalDocument27 pagesGlobal Cycle Notes Hope Springs EternalbobmezzNo ratings yet
- Rate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranoDocument94 pagesRate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranosindhusrivastavaNo ratings yet
- GS Inflation Implementation 10-20Document20 pagesGS Inflation Implementation 10-20bobmezzNo ratings yet
- Gatheral 1Document18 pagesGatheral 1Zhenhuan Song100% (1)
- Elices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskDocument32 pagesElices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskbobmezzNo ratings yet
- SM Maintenance Instructions: Author: Lars Rydén, Konecranes AB, SwedenDocument132 pagesSM Maintenance Instructions: Author: Lars Rydén, Konecranes AB, SwedenDan VekasiNo ratings yet
- Use Jinja2 To Create TemplatesDocument44 pagesUse Jinja2 To Create TemplatesmNo ratings yet
- EDOC-Benefits & Advantages of Applying Externally Gapped Line ArrestersDocument20 pagesEDOC-Benefits & Advantages of Applying Externally Gapped Line ArrestersEl Comedor BenedictNo ratings yet
- Iota Tangle 2.0: Toward A Scalable, Decentralized, Smart, and Autonomous Iot EcosystemDocument8 pagesIota Tangle 2.0: Toward A Scalable, Decentralized, Smart, and Autonomous Iot EcosystemMarcos PonceNo ratings yet
- Propeller Model Tests GuideDocument12 pagesPropeller Model Tests GuideOdpewğw RlelelwNo ratings yet
- Powerful Production Pumps for Deep Geothermal ProjectsDocument4 pagesPowerful Production Pumps for Deep Geothermal ProjectsAchraf AkidNo ratings yet
- Ab5 PDFDocument93 pagesAb5 PDFbhavani nagavarapuNo ratings yet
- Sandvik DL311Document4 pagesSandvik DL311Anonymous Dm7iMmtNo ratings yet
- Peabody y Movent ABCDocument11 pagesPeabody y Movent ABCIngrid BarkoNo ratings yet
- Carbon FibreDocument25 pagesCarbon Fibrejagadish.kvNo ratings yet
- Math Let Reviewer 44 Analytic GeometryDocument3 pagesMath Let Reviewer 44 Analytic Geometryjohn johnNo ratings yet
- Limiting Reagents 1Document17 pagesLimiting Reagents 1Aldrin Jay Patungan100% (1)
- 12 Translations PDFDocument4 pages12 Translations PDFTeo Lee Hong0% (1)
- Temperature Effect On Voc and IscDocument5 pagesTemperature Effect On Voc and IscAnonymous bVLovsnNo ratings yet
- Hemi EngineDocument23 pagesHemi Enginesurendrabarwar7No ratings yet
- Equipment DetailsDocument10 pagesEquipment Detailsimranjani.skNo ratings yet
- Lecture 2 - Kinematics Fundamentals - Part ADocument30 pagesLecture 2 - Kinematics Fundamentals - Part ASuaid Tariq BalghariNo ratings yet
- MetaLINK Info r456Document5 pagesMetaLINK Info r456Milan AntovicNo ratings yet
- Lesson Statement Sheet.Document2 pagesLesson Statement Sheet.Anya AshuNo ratings yet
- Selection of Dryers I - IndiaDocument38 pagesSelection of Dryers I - Indiasilvership2291100% (1)
- Fractional Brownian Motions in Financial Models, Simulation and PricingDocument111 pagesFractional Brownian Motions in Financial Models, Simulation and Pricingnahv_08No ratings yet
- (PPT) Design of A Low-Power Asynchronous SAR ADC in 45 NM CMOS TechnologyDocument42 pages(PPT) Design of A Low-Power Asynchronous SAR ADC in 45 NM CMOS TechnologyMurod KurbanovNo ratings yet
- Sybase Basic & Advanced T-SQL ProgrammingDocument3 pagesSybase Basic & Advanced T-SQL Programmingmehukr0% (1)
- Vorplex - MST - Airblowing and Water FlushingDocument14 pagesVorplex - MST - Airblowing and Water FlushingAmirHakimRusliNo ratings yet
- Reinforcement Detailing in BeamsDocument9 pagesReinforcement Detailing in Beamssaheed tijaniNo ratings yet
- Matlab DrawingDocument82 pagesMatlab Drawinghpeter195798No ratings yet
- CB Climbing Bracket PERIDocument52 pagesCB Climbing Bracket PERINathan FryerNo ratings yet
- POWER Nav1 - MIDTERM - Topic 1 & 2Document31 pagesPOWER Nav1 - MIDTERM - Topic 1 & 2CLIJOHN PABLO FORD100% (1)
- Power System Stability-Chapter 3Document84 pagesPower System Stability-Chapter 3Du TrầnNo ratings yet
- Effect of SR, Na, Ca & P On The Castability of Foundry Alloy A356.2Document10 pagesEffect of SR, Na, Ca & P On The Castability of Foundry Alloy A356.2jose.figueroa@foseco.comNo ratings yet