You might also like
- Spectrometer Interfaced With ArduinoDocument7 pagesSpectrometer Interfaced With ArduinoAgung Arif Nur WibowoNo ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Hand Gesture Controlled RobotDocument59 pagesHand Gesture Controlled RobotNiharikaNo ratings yet
- 5 6066828862526850364Document24 pages5 6066828862526850364Vivek Kalpana Laxman NarsaleNo ratings yet
- Arduino four way tracking car kit tutorialDocument26 pagesArduino four way tracking car kit tutorialvadym_kovalenko4166No ratings yet
- Hss MaterialrequirementsDocument10 pagesHss Materialrequirementsybbvvprasada raoNo ratings yet
- Smartphone Controlled Arduino Rover PDFDocument30 pagesSmartphone Controlled Arduino Rover PDFWalt Whimpenny100% (1)
- Arduino IR Remort SensorDocument9 pagesArduino IR Remort SensorEE 503 AnAsNo ratings yet
- Instrucciones MontajeDocument75 pagesInstrucciones MontajeJosé ToméNo ratings yet
- Controlling DC Motors Using Arduino and IR RemoteDocument12 pagesControlling DC Motors Using Arduino and IR RemoteAshok kumarNo ratings yet
- Interfacing Arduino With Keypad, DC Motor-1Document11 pagesInterfacing Arduino With Keypad, DC Motor-1Ankush KumarNo ratings yet
- Railway Track Crack Detection Using SensorsDocument31 pagesRailway Track Crack Detection Using SensorsJyothi Manne0% (1)
- Obstacle Detecting Line Follower RobotDocument19 pagesObstacle Detecting Line Follower RobotBibek Sau80% (5)
- Dokumen - Tips Arduino Line Follower RobotDocument10 pagesDokumen - Tips Arduino Line Follower RobotAgung SetyonoNo ratings yet
- Accident Detection SystemDocument62 pagesAccident Detection SystemKarthik KingstarNo ratings yet
- Arduino PresentationDocument43 pagesArduino PresentationraamNo ratings yet
- Advance Robotics - Self - Learning Kit - ArduinoDocument68 pagesAdvance Robotics - Self - Learning Kit - ArduinoHarry George ElangbamNo ratings yet
- Arduino Based Fire Fighting Robot ProjectDocument13 pagesArduino Based Fire Fighting Robot ProjectAnant TiwariNo ratings yet
- Arduino Project Report IR CarDocument9 pagesArduino Project Report IR Carmohammad shoaibNo ratings yet
- Arduino Start Kit User ManualDocument32 pagesArduino Start Kit User Manualdantesosa100% (4)
- Ks0159 Keyestudio Desktop Bluetooth Mini Smart CarDocument26 pagesKs0159 Keyestudio Desktop Bluetooth Mini Smart CarpotroloinNo ratings yet
- Industrial Electronics & Robotics: Lab WorkDocument8 pagesIndustrial Electronics & Robotics: Lab WorkIam QaXimNo ratings yet
- GESTIONE DI UN SERVO MOTORE - DefDocument6 pagesGESTIONE DI UN SERVO MOTORE - DefMartina PizziNo ratings yet
- Familiarization With Arduino Board and IDE.Document6 pagesFamiliarization With Arduino Board and IDE.Sania NowshinNo ratings yet
- Arduino With Dual Motor Tank Coded in TinkerCad CoDocument11 pagesArduino With Dual Motor Tank Coded in TinkerCad CoLawrence DataNo ratings yet
- AkhilDocument25 pagesAkhilNiharikaNo ratings yet
- Mobile Phone Controlled RobotDocument19 pagesMobile Phone Controlled RobotNippu KumarNo ratings yet
- GESTURE CONTROLLED ROBOTDocument15 pagesGESTURE CONTROLLED ROBOTRaghav MestaNo ratings yet
- Automatic Railway Gate Control SystemDocument5 pagesAutomatic Railway Gate Control SystemTasnim RahmanNo ratings yet
- REPORTDocument22 pagesREPORThohi4808No ratings yet
- Arduino 4WD Rover Bluetooth Controlled by AndroidDocument13 pagesArduino 4WD Rover Bluetooth Controlled by AndroidMyintMoeNo ratings yet
- Motor Driver Circuit For ArduinoDocument5 pagesMotor Driver Circuit For ArduinoEko Hadi SusantoNo ratings yet
- Obstacle Avoiding Robot Lab Project ReportDocument27 pagesObstacle Avoiding Robot Lab Project Reportyaswanth yashuNo ratings yet
- Practicals PBL IDocument38 pagesPracticals PBL IShrishti ChordiaNo ratings yet
- iot module 2 materialDocument36 pagesiot module 2 materialteswart2002No ratings yet
- Eisd-Task 2 DC MotorsDocument16 pagesEisd-Task 2 DC Motorsraunak4547.be23No ratings yet
- Bluetooth Controlled RobotDocument7 pagesBluetooth Controlled RobotjnaguNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- ArdproDocument29 pagesArdproMd. Ibrahim HossainNo ratings yet
- Soil Moisture Sensor Module - ENDocument20 pagesSoil Moisture Sensor Module - ENSanti MartínNo ratings yet
- Arduino Project Final ReportDocument17 pagesArduino Project Final Reportminalhasan2No ratings yet
- Remote Control Via GPRSDocument18 pagesRemote Control Via GPRSYDe AlidoNo ratings yet
- DIY L298N 2WD Motor Robot Car Kit AssemblyDocument21 pagesDIY L298N 2WD Motor Robot Car Kit AssemblyAmin Iqmal100% (2)
- Lab Report OnDocument8 pagesLab Report OnNrusingha Prasad PandaNo ratings yet
- Arduino CarDocument20 pagesArduino CarHarsha Kotuwegedara100% (1)
- Hand Gesture Control Robot PDFDocument3 pagesHand Gesture Control Robot PDFMd IrfanNo ratings yet
- Arduino DC Motor ControlDocument4 pagesArduino DC Motor ControlKathryn WorkmanNo ratings yet
- Full Paper of Arduino Based Obstacle Avoidance RobotDocument3 pagesFull Paper of Arduino Based Obstacle Avoidance RobotsabahatNo ratings yet
- Lab 3Document6 pagesLab 3Vu LeNo ratings yet
- Android Controlled Arduino Robot Car: Jie HouDocument27 pagesAndroid Controlled Arduino Robot Car: Jie HouRafa S.C.No ratings yet
- Mechatronics Boot Camp - May2022Document60 pagesMechatronics Boot Camp - May2022Maryam MehekNo ratings yet
- Obstacle Avoiding RobotDocument18 pagesObstacle Avoiding RobotAJIN KNo ratings yet
- Downloadfile 17Document14 pagesDownloadfile 17Ahmed gamal ebiedNo ratings yet
- American International University of BangladeshDocument9 pagesAmerican International University of BangladeshArif KhanNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding RobotNishant Kamal93% (15)
- IR Remote Controlled Home Automation Using ArduinoDocument10 pagesIR Remote Controlled Home Automation Using ArduinoAar Arafat50% (2)
- Build a Bluetooth Home Automation Setup Using ArduinoDocument15 pagesBuild a Bluetooth Home Automation Setup Using ArduinoCairineLopesNo ratings yet
- Arduino Learning Kit ManualDocument113 pagesArduino Learning Kit Manualsadke213No ratings yet
- Generate Blob Under Linux - V2Document14 pagesGenerate Blob Under Linux - V2daniel100% (1)
- Linaro UEFI Secure Boot and DRIDocument12 pagesLinaro UEFI Secure Boot and DRIdanielNo ratings yet
- ERR010873 Secure Boot Vulnerability Erratum Preliminary Rev0 PDFDocument3 pagesERR010873 Secure Boot Vulnerability Erratum Preliminary Rev0 PDFdanielNo ratings yet
- CircuitsDocument22 pagesCircuitsapi-3732151100% (1)
- ERR010873 Secure Boot Vulnerability Erratum Preliminary Rev0 PDFDocument3 pagesERR010873 Secure Boot Vulnerability Erratum Preliminary Rev0 PDFdanielNo ratings yet
- C Lenguage PDFDocument153 pagesC Lenguage PDFbushraqadri100% (1)
- ERR010872 Secure Boot Vulnerability Erratum Preliminary Rev0 PDFDocument3 pagesERR010872 Secure Boot Vulnerability Erratum Preliminary Rev0 PDFdanielNo ratings yet
- ERR010872 Secure Boot Vulnerability Erratum Preliminary Rev0 PDFDocument3 pagesERR010872 Secure Boot Vulnerability Erratum Preliminary Rev0 PDFdanielNo ratings yet
- Digital Signal Processing ProgsDocument110 pagesDigital Signal Processing ProgsatluripallaviNo ratings yet
- Space ElectronicsDocument19 pagesSpace ElectronicsdanielNo ratings yet
- Flashing of Leds With Arm ProcessorDocument2 pagesFlashing of Leds With Arm ProcessordanielNo ratings yet
- (A Constituent College of Anna University) : Dr. M. Malleswaran Hod/EceDocument2 pages(A Constituent College of Anna University) : Dr. M. Malleswaran Hod/EcedanielNo ratings yet
- Eprom InterfacingDocument3 pagesEprom InterfacingdanielNo ratings yet
- Stepper Motor With ARM V2Document2 pagesStepper Motor With ARM V2danielNo ratings yet
- Mechanical FanDocument10 pagesMechanical FandanielNo ratings yet
- RTC Interfacing With ArmDocument4 pagesRTC Interfacing With ArmdanielNo ratings yet
- TVM IV Permission Letter UCoE KanchipuramDocument2 pagesTVM IV Permission Letter UCoE KanchipuramdanielNo ratings yet
- Frequency Shift Keying: Batch No: 2Document7 pagesFrequency Shift Keying: Batch No: 2danielNo ratings yet
- Adaptive FilteringDocument19 pagesAdaptive FilteringdanielNo ratings yet
- Principles of Management - DirectingDocument32 pagesPrinciples of Management - DirectingdanielNo ratings yet
- Catalog Modicon M221 Programmable Logic Controller For Hardwired Architectures - 20Document1 pageCatalog Modicon M221 Programmable Logic Controller For Hardwired Architectures - 20S DNo ratings yet
- Seacon Catalog - Hummer ConnectorDocument8 pagesSeacon Catalog - Hummer ConnectorBruno SallesNo ratings yet
- CA 008006 enDocument28 pagesCA 008006 enJefferson CalderónNo ratings yet
- Summer Training On ArduinoDocument52 pagesSummer Training On ArduinoAakritiNo ratings yet
- Wincor Nixdorf BEETLE 50Document102 pagesWincor Nixdorf BEETLE 50Oferty Firm / SklepówNo ratings yet
- Model: ACA400 & ACA500 Reverse Camera Installation Manual: FeaturesDocument13 pagesModel: ACA400 & ACA500 Reverse Camera Installation Manual: FeaturesMuhammad ZamanNo ratings yet
- Kids ATV ManualDocument20 pagesKids ATV ManualGourav DasNo ratings yet
- Sealey Inverter PI1000Document3 pagesSealey Inverter PI1000William KellyNo ratings yet
- Alsa Excell 400 - User Manual PDFDocument30 pagesAlsa Excell 400 - User Manual PDFAyaovi JorlauNo ratings yet
- Data Sheet LMV26.300A2, LMV36.300A2, AGM60.1A9Document288 pagesData Sheet LMV26.300A2, LMV36.300A2, AGM60.1A9henddikNo ratings yet
- SC Ak600 PDFDocument32 pagesSC Ak600 PDFLuis Rojas BarbaránNo ratings yet
- OpenTx FrSky Manual 130717Document39 pagesOpenTx FrSky Manual 130717bill080808No ratings yet
- Boom and Bucket HidraulicsDocument44 pagesBoom and Bucket HidraulicsSERGIO CARDENAS CASTILLONo ratings yet
- Common Wire Splices and JointsDocument14 pagesCommon Wire Splices and JointsRoselleAntonioVillajuanLinsanganNo ratings yet
- Profinet DiagnosticDocument25 pagesProfinet Diagnosticblazer111No ratings yet
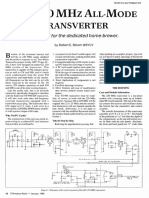
- 220 MHZ All-Mode Transverter PDFDocument6 pages220 MHZ All-Mode Transverter PDFvu2ttp0% (1)
- MSP Duct Installation ManualDocument48 pagesMSP Duct Installation ManualPablo DenisNo ratings yet
- Amali Report 1Document7 pagesAmali Report 1Hatsune MikuNo ratings yet
- Manual FluorometroDocument43 pagesManual FluorometroManuel Diaz GomezNo ratings yet
- Hardware en BiofeedbackDocument44 pagesHardware en BiofeedbackImran BahaNo ratings yet
- Fluke Temperature Sensor 80PK-27Document5 pagesFluke Temperature Sensor 80PK-27Luís FalcãoNo ratings yet
- Description and Operating Instructions: Multicharger 750 12V/40A 24V/20A 36V/15ADocument34 pagesDescription and Operating Instructions: Multicharger 750 12V/40A 24V/20A 36V/15APablo Barboza0% (1)
- SRP DSL CatlougeDocument6 pagesSRP DSL CatlougePrasanna D MudubageNo ratings yet
- TH-42LF20U TH-47LF20U: Full HD LCD DisplayDocument49 pagesTH-42LF20U TH-47LF20U: Full HD LCD DisplayatalincNo ratings yet
- Aj65sbt2b 64adDocument28 pagesAj65sbt2b 64adlowys235375No ratings yet
- MDE LEDInetwork TDS 4099 UKDocument101 pagesMDE LEDInetwork TDS 4099 UKJaime Sánchez PuertasNo ratings yet
- FLR Repuestos06!02!2024Document4 pagesFLR Repuestos06!02!2024JEREMY GARCESNo ratings yet
- Shimadzu Uv1601 ManualDocument251 pagesShimadzu Uv1601 ManualEric Thorania Khan100% (1)
- Use Your CD-ROM Drive as a Digital Audio CD PlayerDocument1 pageUse Your CD-ROM Drive as a Digital Audio CD PlayerShrivlsi RamNo ratings yet
- MP3 400 Injector Circuit Testing and Repair GuideDocument20 pagesMP3 400 Injector Circuit Testing and Repair GuideH. KeithNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- Model-based System and Architecture Engineering with the Arcadia MethodFrom EverandModel-based System and Architecture Engineering with the Arcadia MethodNo ratings yet
- Dancing with Qubits: How quantum computing works and how it can change the worldFrom EverandDancing with Qubits: How quantum computing works and how it can change the worldRating: 5 out of 5 stars5/5 (1)
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsFrom EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsRating: 4.5 out of 5 stars4.5/5 (49)
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersFrom Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersNo ratings yet
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- From Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionFrom EverandFrom Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionNo ratings yet
- Electronic Dreams: How 1980s Britain Learned to Love the ComputerFrom EverandElectronic Dreams: How 1980s Britain Learned to Love the ComputerRating: 5 out of 5 stars5/5 (1)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesFrom EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesNo ratings yet