You might also like
- VikasaDocument14 pagesVikasaRajiv Sawanth RNo ratings yet
- IPL 2017 Schedule PDFDocument3 pagesIPL 2017 Schedule PDFsampleNo ratings yet
- Gita SarDocument17 pagesGita Sarkushal jaitwaniNo ratings yet
- Valves InfoDocument43 pagesValves InfoNitin KumbleNo ratings yet
- Apple Art PDFDocument41 pagesApple Art PDFRajiv Sawanth RNo ratings yet
- Architecture Services: Building TypesDocument2 pagesArchitecture Services: Building TypesRajiv Sawanth RNo ratings yet
- Apple ArtDocument41 pagesApple ArtRajiv Sawanth RNo ratings yet
- Sample Resume 2Document2 pagesSample Resume 2Tara GonzalesNo ratings yet
- Welding Sheet Metal SonDocument36 pagesWelding Sheet Metal SonRajiv Sawanth R100% (1)
- Ia 06 Prog Lang IADocument80 pagesIa 06 Prog Lang IARajiv Sawanth RNo ratings yet
- CATIA Exams Sample QuestionsDocument12 pagesCATIA Exams Sample QuestionsGanesh Bashyal PittalsNo ratings yet
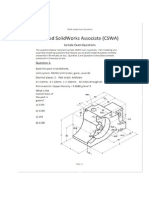
- SolidWorks CSWADocument7 pagesSolidWorks CSWAkannankrivNo ratings yet
- PRO-E WeldDocument110 pagesPRO-E WeldRajiv Sawanth RNo ratings yet
- Gears in ProeDocument13 pagesGears in ProeHector OliverNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hydrogen Spectral LinesDocument17 pagesHydrogen Spectral LinesarnoldNo ratings yet
- ELECTROSTATICS HARD Question Paper With SolutionDocument30 pagesELECTROSTATICS HARD Question Paper With SolutionArvita KaurNo ratings yet
- Heat Transfer Chapter One and TwoDocument74 pagesHeat Transfer Chapter One and TwoTariku Negash100% (2)
- FALLSEM2018-19 - MEE1004 - ETH - MB309 - VL2018191003741 - Reference Material I - Fluid Mechanics-3 PDFDocument69 pagesFALLSEM2018-19 - MEE1004 - ETH - MB309 - VL2018191003741 - Reference Material I - Fluid Mechanics-3 PDFSivaram PeramNo ratings yet
- Electronic Device Chapter1Document57 pagesElectronic Device Chapter1Saad KhaliqNo ratings yet
- DC Motor Calculations - Calculating Torque - MICROMODocument8 pagesDC Motor Calculations - Calculating Torque - MICROMOaniruthNo ratings yet
- Tensor Algebra: 2.1 Linear Forms and Dual Vector SpaceDocument13 pagesTensor Algebra: 2.1 Linear Forms and Dual Vector SpaceashuNo ratings yet
- Essential Soil Tests for Building FoundationsDocument6 pagesEssential Soil Tests for Building FoundationsJustin MusopoleNo ratings yet
- Heat Treatment of 7xxx Series Aluminium Alloys-Some Recent DevelopmentsDocument15 pagesHeat Treatment of 7xxx Series Aluminium Alloys-Some Recent DevelopmentsDung Xuan100% (1)
- Double Integrals 2012Document17 pagesDouble Integrals 2012DIey ChokiEyNo ratings yet
- NCCI: Mono-Symmetrical Uniform Members Under Bending and Axial CompressionDocument15 pagesNCCI: Mono-Symmetrical Uniform Members Under Bending and Axial CompressionhapsinteNo ratings yet
- Umsingh AP Unit 5 Magnetic Properties of Materials - 975Document15 pagesUmsingh AP Unit 5 Magnetic Properties of Materials - 975Pranav ReddyNo ratings yet
- Unveiling The Secrets of String TheoryDocument2 pagesUnveiling The Secrets of String Theorybic1973No ratings yet
- X-Ray Production and Interactions GuideDocument111 pagesX-Ray Production and Interactions GuidexhibaxNo ratings yet
- 11 Physics Sample Paper 4Document9 pages11 Physics Sample Paper 4Jyoti YadavNo ratings yet
- Perhitungan Pressure Vessel LengkapDocument70 pagesPerhitungan Pressure Vessel LengkapReo Aditya MahesaNo ratings yet
- HDI Direct Injection OperationDocument31 pagesHDI Direct Injection OperationdjautoNo ratings yet
- PX267 - Hamilton MechanicsDocument2 pagesPX267 - Hamilton MechanicsRebecca Rumsey100% (1)
- IB Chemistry 1 SL QuestionsDocument36 pagesIB Chemistry 1 SL QuestionsCamilla0% (3)
- Seminar Report On: BeltsDocument14 pagesSeminar Report On: BeltsMayank RawatNo ratings yet
- CH 29Document13 pagesCH 29CristianNo ratings yet
- HW1Document2 pagesHW1Treesha MalhotraNo ratings yet
- Lect 17Document26 pagesLect 17vatsalp3No ratings yet
- Von Neumann AnalysisDocument16 pagesVon Neumann AnalysisakkansalNo ratings yet
- OutputDocument5 pagesOutputMoch Raka RizkiNo ratings yet
- Bahir Dar Academy Department of Physics Physics Worksheet V For Grade 11 (Rotational Motion)Document2 pagesBahir Dar Academy Department of Physics Physics Worksheet V For Grade 11 (Rotational Motion)Michael AmareNo ratings yet
- Tension Test ReportDocument7 pagesTension Test Reportzgts100% (1)
- (L1) - (JLD 2.0) - NLM - 14th JulyDocument92 pages(L1) - (JLD 2.0) - NLM - 14th JulyRaman BajajNo ratings yet
- Fyp Final Report Template (Guideline)Document14 pagesFyp Final Report Template (Guideline)Arif ZukriNo ratings yet
- Spacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaDocument13 pagesSpacetime Singularity & Poincare's Balayage: Mathematical Renormalization of Newtonian Potentials Using Nonlinear Singular Elliptic and Parabolic Equations. Carlos C. ArandaCarlos Cesar ArandaNo ratings yet