You might also like
- Modbus-Rtu Con El Step 7 Basic s7-1200Document6 pagesModbus-Rtu Con El Step 7 Basic s7-1200ccarbajal_3No ratings yet
- PLC ModbusDocument6 pagesPLC ModbusVeronica Andrade GarciaNo ratings yet
- Modulo Analogico Em235 Del PLC SiemensDocument3 pagesModulo Analogico Em235 Del PLC Siemensjahir sanzNo ratings yet
- Módulo EM 235Document8 pagesMódulo EM 235Alex TipantuñaNo ratings yet
- PXE 100 FM05 136 A Ops SpanishDocument54 pagesPXE 100 FM05 136 A Ops SpanishPala JhonaphNo ratings yet
- 2 PLC Ii - S7-200 - Em235Document8 pages2 PLC Ii - S7-200 - Em235Eduardo Herrera CarrilloNo ratings yet
- Solución Comunicacion 2 PLC S7-1200 PDFDocument6 pagesSolución Comunicacion 2 PLC S7-1200 PDFJT Hidalgo RzNo ratings yet
- CIRCUITO Cerca ElectrificadaDocument3 pagesCIRCUITO Cerca Electrificadaelvergonzalez1No ratings yet
- Desarrollo de HMI en CodeSysDocument14 pagesDesarrollo de HMI en CodeSysArmando UribeNo ratings yet
- Envolventes NemaDocument3 pagesEnvolventes NemaJorge ContrerasNo ratings yet
- Medicion de Potencia TrifasicaDocument11 pagesMedicion de Potencia Trifasicapepitito3113No ratings yet
- Infoplc Net Tia Tour - Sinamics v20Document40 pagesInfoplc Net Tia Tour - Sinamics v20faspNo ratings yet
- Comunicación Logo S7-1200 en Proyecto TIA Portal y LOGO SoftV8 Tecnoplc PDFDocument15 pagesComunicación Logo S7-1200 en Proyecto TIA Portal y LOGO SoftV8 Tecnoplc PDFfasp100% (1)
- Allen BradleyDocument356 pagesAllen BradleyamiguitoNo ratings yet
- Informe-AutomatizacionDocument10 pagesInforme-AutomatizacionJohny JacomeNo ratings yet
- SCE - ES - 051-201 SCL Por S7-1200 - R1709Document39 pagesSCE - ES - 051-201 SCL Por S7-1200 - R1709saul juradoNo ratings yet
- C445 BrochureDocument2 pagesC445 BrochureHugo Dennis Mattos Espinoza100% (1)
- Qué Es Un DaserverDocument4 pagesQué Es Un DaserverAndresinho SievchenkoNo ratings yet
- Devicenet LaboratorioDocument31 pagesDevicenet LaboratorioRonald Huarca HuayllaNo ratings yet
- InfoPLC Net 1 PLCs Schneider PDFDocument75 pagesInfoPLC Net 1 PLCs Schneider PDFDaniel Alavez Quiroz100% (1)
- Red Profibus en Un Sistema Automatizado-21-45Document25 pagesRed Profibus en Un Sistema Automatizado-21-45Jesús Zacarías ZapataNo ratings yet
- MC6 Manual de UsuarioDocument96 pagesMC6 Manual de UsuarioHUGONo ratings yet
- Método Newton-Raphson Extendido Método Inyección de Corrientes Método Newton-Raphson Caída de Voltaje (Sólo para Redes Radiales!) Flujo de Carga DCDocument45 pagesMétodo Newton-Raphson Extendido Método Inyección de Corrientes Método Newton-Raphson Caída de Voltaje (Sólo para Redes Radiales!) Flujo de Carga DCdash labNo ratings yet
- Funcionamiento FB41Document16 pagesFuncionamiento FB41jaimeasisaNo ratings yet
- LAB7 Modbus RTUDocument14 pagesLAB7 Modbus RTUDemian WayneNo ratings yet
- Pantalla HMI Con PLCDocument15 pagesPantalla HMI Con PLCXavier PanamaNo ratings yet
- HRT2MDB Datasheet EsDocument3 pagesHRT2MDB Datasheet EstinchusNo ratings yet
- Inter BusDocument7 pagesInter BusJuan Jimenez MendozaNo ratings yet
- Comunicador Hart Portatil N0490007 Manual Del Usuario: Fecha Edición 08/2014 #Versión 01Document40 pagesComunicador Hart Portatil N0490007 Manual Del Usuario: Fecha Edición 08/2014 #Versión 01Johnn ChalcoNo ratings yet
- Comunicaciones Industriales 4 Conexion Ethernet MicroLogixDocument23 pagesComunicaciones Industriales 4 Conexion Ethernet MicroLogixRicardo ZzeroNo ratings yet
- Profibus BaseDocument23 pagesProfibus BaseMiguel DumaniNo ratings yet
- Ahorro de Energia Con Variadores de Velocidad DanfossDocument7 pagesAhorro de Energia Con Variadores de Velocidad DanfossJosé FlzNo ratings yet
- L Red Eye 2G Water-Cut Meter SpanishDocument4 pagesL Red Eye 2G Water-Cut Meter SpanishRaul DiazNo ratings yet
- Hendress Houser Proline Promass 83 PDFDocument28 pagesHendress Houser Proline Promass 83 PDFJulio Cesar Hernandez TrujilloNo ratings yet
- Practica 4Document7 pagesPractica 4David Torres HerreraNo ratings yet
- Diapositivas Radar de Nivel Onda Guiada y No GuiadaDocument35 pagesDiapositivas Radar de Nivel Onda Guiada y No GuiadagdgdgdgNo ratings yet
- Curso PLC BasicoDocument63 pagesCurso PLC BasicoAlejandro Ramirez VazquezNo ratings yet
- Control de Movimiento SchneiderDocument122 pagesControl de Movimiento SchneiderDavid IoannuNo ratings yet
- Controladores Logico ProgramablesDocument72 pagesControladores Logico ProgramablesRodrigo Alvaro Centellas AzeroNo ratings yet
- CM20160713 53120 37605Document32 pagesCM20160713 53120 37605jorgeortiz1982No ratings yet
- Manual Operacion SCADADocument21 pagesManual Operacion SCADARodrigo19792016No ratings yet
- Convertidores de ComunicaciónDocument13 pagesConvertidores de ComunicaciónGuillermo Aguilar CórdovaNo ratings yet
- Et200sp Ai 8xrtd TC 2 Wire HF Manual Es-ES Es-ESDocument77 pagesEt200sp Ai 8xrtd TC 2 Wire HF Manual Es-ES Es-ESenrique benitezNo ratings yet
- Codigo Hart Con LabviewDocument35 pagesCodigo Hart Con LabviewHugo ContrerasNo ratings yet
- Práctica 525 Version Principiante Great DEMODocument94 pagesPráctica 525 Version Principiante Great DEMORAUL MUÑOZNo ratings yet
- Tipos de SeñalesDocument3 pagesTipos de SeñalesipozasNo ratings yet
- Sensor FotoeléctricoDocument2 pagesSensor FotoeléctricoAntónio FrançaNo ratings yet
- Ficha Tecnica Calentador SolarDocument1 pageFicha Tecnica Calentador SolarErnesto ValtoNo ratings yet
- Manual ControladorDocument7 pagesManual Controladoralex100pre100% (1)
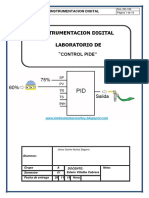
- LABORATORIO Control PIDEDocument18 pagesLABORATORIO Control PIDEJilmar Danilo Nunez ZegarraNo ratings yet
- PROFIsafe EspañolDocument41 pagesPROFIsafe EspañolMario BorgiattinoNo ratings yet
- WEG Cfw100 Manual Modbus Rtu 10002909577 Manual EspanolDocument27 pagesWEG Cfw100 Manual Modbus Rtu 10002909577 Manual EspanolLima RochaNo ratings yet
- Pac 01 PidDocument10 pagesPac 01 PidPalmer DionicioNo ratings yet
- Evaluación 1Document6 pagesEvaluación 1danielaNo ratings yet
- Entrega de ExamenDocument18 pagesEntrega de ExamenAndres Perez100% (1)
- Características PLC Siemens S7Document12 pagesCaracterísticas PLC Siemens S7Patricio Yupangui Segovia0% (1)
- Manual - Moden Ground ElectronicsDocument18 pagesManual - Moden Ground ElectronicsSuministros MantenimientoNo ratings yet
- Comunicación MODBUS-RTU Entre Dos Autómatas S7-1200Document12 pagesComunicación MODBUS-RTU Entre Dos Autómatas S7-1200faspNo ratings yet
- Práctica 3. Comunicación Con RS-485 y MODBUS: Automatización Avanzada (37800) Máster en Automática y RobóticaDocument28 pagesPráctica 3. Comunicación Con RS-485 y MODBUS: Automatización Avanzada (37800) Máster en Automática y Robóticaluis AlvarezNo ratings yet
- Prácticas de redes de datos e industrialesFrom EverandPrácticas de redes de datos e industrialesRating: 4 out of 5 stars4/5 (5)
- 119444Document123 pages119444HernánFelipeSernaNo ratings yet
- WEG Srw01 Manual de La Comunicacion Modbus Rtu 10000521680 4.0x Manual EspanolDocument23 pagesWEG Srw01 Manual de La Comunicacion Modbus Rtu 10000521680 4.0x Manual EspanolMartín SanchezNo ratings yet
- 119444Document123 pages119444HernánFelipeSernaNo ratings yet
- Electricidad-Teoria y TecnologiaDocument118 pagesElectricidad-Teoria y Tecnologiaormicanb100% (1)
- Catalogo Ejes INADocument12 pagesCatalogo Ejes INALuis VillafañaNo ratings yet
- C1 Selectividad de Baja Tensión Con Interruptores AutomáticosDocument54 pagesC1 Selectividad de Baja Tensión Con Interruptores AutomáticosVatek Automatizacion100% (1)
- Easygen brochureESPDocument8 pagesEasygen brochureESPdinkoheNo ratings yet
- Catalogo General Con CodigosDocument223 pagesCatalogo General Con CodigosricardoqqNo ratings yet
- Especificaciones TecnicasDocument48 pagesEspecificaciones Tecnicasricardoqq100% (1)
- Catalogo General de RittallDocument30 pagesCatalogo General de RittallricardoqqNo ratings yet
- Subtableros de DistribucionDocument1 pageSubtableros de DistribucionricardoqqNo ratings yet
- Subtableros de DistribucionDocument1 pageSubtableros de DistribucionricardoqqNo ratings yet
- Medición y Análisis Del Efecto Armónico en Los Bancos de Compensación ReactivaDocument6 pagesMedición y Análisis Del Efecto Armónico en Los Bancos de Compensación ReactivaOscar PeñaNo ratings yet
- CT13-Comunicacion Via Bus Con Los Interruptores ABB - ES-OKDocument108 pagesCT13-Comunicacion Via Bus Con Los Interruptores ABB - ES-OKricardoqqNo ratings yet
- Capitulo 4Document24 pagesCapitulo 4Luis SantizoNo ratings yet
- WEG Fusibles Ultra Rapidos Tipo NH Ar 50030486 Catalogo Espanol PDFDocument20 pagesWEG Fusibles Ultra Rapidos Tipo NH Ar 50030486 Catalogo Espanol PDFocaolg73100% (1)
- Electricidad-Teoria y TecnologiaDocument118 pagesElectricidad-Teoria y Tecnologiaormicanb100% (1)
- Reles para Control y Bornes SchneiderDocument48 pagesReles para Control y Bornes SchneiderDavid Jose Poma Guillen100% (1)
- Request For Quotation No 6000055421Document2 pagesRequest For Quotation No 6000055421ricardoqqNo ratings yet
- 15kv SMC One Gear EspañolDatosTecnicos 7760-td001 - Es-PDocument38 pages15kv SMC One Gear EspañolDatosTecnicos 7760-td001 - Es-PricardoqqNo ratings yet
- Compensacion ReactivaDocument94 pagesCompensacion ReactivayormanalejandroNo ratings yet
- Tablero de Distribucion1Document1 pageTablero de Distribucion1ricardoqqNo ratings yet
- Term o Magnetic oDocument2 pagesTerm o Magnetic oricardoqqNo ratings yet
- Guía Técnica para Selección de Interruptores de Protección 2Document27 pagesGuía Técnica para Selección de Interruptores de Protección 2Brayan PerezNo ratings yet
- Neumatica Industrial ParkerDocument167 pagesNeumatica Industrial Parkeralexarbo100% (2)
- Brochure Lonchera BajaDocument24 pagesBrochure Lonchera BajaricardoqqNo ratings yet
- Descripcion Barras Colectoras SiemensDocument34 pagesDescripcion Barras Colectoras SiemensricardoqqNo ratings yet
- Guía Técnica para Selección de Interruptores de Protección 2Document27 pagesGuía Técnica para Selección de Interruptores de Protección 2Brayan PerezNo ratings yet
- Informe Práctica BluetoothDocument5 pagesInforme Práctica BluetoothJorgeNo ratings yet
- Modelos de Networking y Capas OsiDocument81 pagesModelos de Networking y Capas OsiLenalee LeeNo ratings yet
- Autómatas ProgramablesDocument8 pagesAutómatas ProgramablesKarlaMedinaNo ratings yet
- 4.1.4.6 SmartlabDocument26 pages4.1.4.6 SmartlabANDRES ACOSTA ACEVEDONo ratings yet
- Egel - B - C1Document55 pagesEgel - B - C1Jonathan Uriel Velarde MendezNo ratings yet
- 01 - Análisis de Bases de Datos de Ventas Mediante Formato CondicionalDocument39 pages01 - Análisis de Bases de Datos de Ventas Mediante Formato CondicionalLuis EduardoNo ratings yet
- Ejemplos NoSQLDocument33 pagesEjemplos NoSQLMarioNo ratings yet
- Taller Planeando Ando-RedesDocument4 pagesTaller Planeando Ando-RedesLiwina K-demy App100% (2)
- Protocolos y Filtros Del Cisco Packet TracerDocument13 pagesProtocolos y Filtros Del Cisco Packet TracerWilfredo Rafael FloresNo ratings yet
- 2-Protocolos de RedDocument69 pages2-Protocolos de RedJaime EcheverriNo ratings yet
- Tesis Punto de VentaDocument25 pagesTesis Punto de VentaRicardo Osmar Mejia Blancas100% (1)
- Trabajo Diseño de Sistemas Unidad 3Document12 pagesTrabajo Diseño de Sistemas Unidad 3juanDLreyesNo ratings yet
- Lab2 ArduinoDocument16 pagesLab2 ArduinoFran PerreoNo ratings yet
- Guia de Referencia de Reemplazos de Transistores PeaveyDocument23 pagesGuia de Referencia de Reemplazos de Transistores PeaveyJuan Polo75% (4)
- Componentes de Un Dispositivo MóvilDocument3 pagesComponentes de Un Dispositivo MóvilFelipe Rosero PoloNo ratings yet
- Dpso U1 EaDocument12 pagesDpso U1 EaAntoniy StarkNo ratings yet
- Comandos PfbatchDocument6 pagesComandos PfbatchAlberto Escandizo ReyNo ratings yet
- Sansung Modelo 55 Cl21m21mqDocument63 pagesSansung Modelo 55 Cl21m21mqCarlos Alberto NievesNo ratings yet
- Tesis EspinoDocument23 pagesTesis EspinoCristhian Paul Espino Cuadros100% (1)
- Implementación de Control de Asistencia para El Personal Docente, Administrativo y EstudiantesDocument15 pagesImplementación de Control de Asistencia para El Personal Docente, Administrativo y EstudiantesJorDan Chacon VillacisNo ratings yet
- Instituto Superior TecnologicoDocument4 pagesInstituto Superior TecnologicoGabrielNo ratings yet
- Windows 7 SP1 x86-x64 - Descargar Torrent TodoCVCDDocument8 pagesWindows 7 SP1 x86-x64 - Descargar Torrent TodoCVCDkorona1983No ratings yet
- KernelDocument1 pageKernelMelissa RamosNo ratings yet
- Cuestionario DNSDocument5 pagesCuestionario DNSluisprez30No ratings yet
- BlackBerry Z10 Smartphone-1337191904827 00052-10.2-EsDocument295 pagesBlackBerry Z10 Smartphone-1337191904827 00052-10.2-Esnaxo132No ratings yet
- Arduino Uno R3, Qué Es, Características, Precio, Programación PDFDocument26 pagesArduino Uno R3, Qué Es, Características, Precio, Programación PDFIlda D´CrozNo ratings yet
- D-39934 (Tesis Espol Enc28j60)Document136 pagesD-39934 (Tesis Espol Enc28j60)Daniel SegNo ratings yet
- LSMW Caso de EstudioDocument92 pagesLSMW Caso de EstudioMiguel Angel IsasiNo ratings yet
- Practica 6 CiscoDocument9 pagesPractica 6 CiscoIng Osvaldo GonzalezNo ratings yet