You might also like
- Esp32-Wroom-32 Datasheet enDocument27 pagesEsp32-Wroom-32 Datasheet enSichzeugNo ratings yet
- Derivation of Kinematic Equations: View This After Motion On An Incline LabDocument27 pagesDerivation of Kinematic Equations: View This After Motion On An Incline LabLeaRowenaCabugonNo ratings yet
- Mechanics ReviewDocument8 pagesMechanics ReviewWanMohdAimranNo ratings yet
- Physics Intro & KinematicsDocument7 pagesPhysics Intro & KinematicsGavie MarquosNo ratings yet
- Acceleration: Velocity VectorDocument16 pagesAcceleration: Velocity Vectorblowmeasshole1911No ratings yet
- Direct Memory Access (DMA) Is A Feature of Modern Computers That Allows Certain HardwareDocument15 pagesDirect Memory Access (DMA) Is A Feature of Modern Computers That Allows Certain HardwareAshutosh KumarNo ratings yet
- Design and Fabrication of A GripperDocument8 pagesDesign and Fabrication of A Gripperengr_faheemNo ratings yet
- Kinematics NotesDocument53 pagesKinematics Notesapi-322685316No ratings yet
- Power Generation Using Speed Breaker Ieee FormatDocument7 pagesPower Generation Using Speed Breaker Ieee Formatnagarjuna888No ratings yet
- Dynamics Tutorial 7-Kinematiks-Velocity and Acceleration Diagrams-31p PDFDocument31 pagesDynamics Tutorial 7-Kinematiks-Velocity and Acceleration Diagrams-31p PDFmanfredm6435No ratings yet
- Diff EQDocument154 pagesDiff EQEl DNo ratings yet
- 2D Axisymmetric Threaded Connection: © 2011 ANSYS, Inc. July 12, 2013 1Document16 pages2D Axisymmetric Threaded Connection: © 2011 ANSYS, Inc. July 12, 2013 1minhnguyenvonhatNo ratings yet
- User Manual For Software Product 1K62 Lathe Simulator Brief Description of The Software ProductDocument11 pagesUser Manual For Software Product 1K62 Lathe Simulator Brief Description of The Software ProductAlix BoubanNo ratings yet
- DESIGN OF MACHINERY - Problem 4-18gDocument2 pagesDESIGN OF MACHINERY - Problem 4-18gGiordano VieiraNo ratings yet
- Lab 5Document11 pagesLab 5Waleed Bashir KotlaNo ratings yet
- IJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABDocument6 pagesIJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Robotic Path Control TechniquesDocument52 pagesRobotic Path Control TechniquesandresNo ratings yet
- Chapter 3Document58 pagesChapter 3ketemaNo ratings yet
- CE Laws by VerbzDocument17 pagesCE Laws by VerbzTroi DiazNo ratings yet
- Darlington Transistor Modeling and Simulation of The Pspice: AnalogDocument5 pagesDarlington Transistor Modeling and Simulation of The Pspice: AnalogLindsay CookNo ratings yet
- Chapter 11: Dynamic Force AnalysisDocument34 pagesChapter 11: Dynamic Force AnalysisSurenderan LoganNo ratings yet
- Robotics Midterm ReviewDocument12 pagesRobotics Midterm ReviewGrayson SavageNo ratings yet
- Numerical Control and Industrial Robotics: Review QuestionsDocument9 pagesNumerical Control and Industrial Robotics: Review QuestionsDavid GonzalezNo ratings yet
- Inverse Kinematics PUMA 762 SimulatorDocument1 pageInverse Kinematics PUMA 762 SimulatorMuhammad ZulfiqarNo ratings yet
- Bisection MethodDocument13 pagesBisection MethodFarizza Ann KiseoNo ratings yet
- PDF 38 1 PDFDocument190 pagesPDF 38 1 PDFCharan GorentlaNo ratings yet
- Applied Mathematics and Mechanics: (English Edition)Document16 pagesApplied Mathematics and Mechanics: (English Edition)Anonymous IqCUJjOINo ratings yet
- EncoderDocument44 pagesEncoderdaiduongxanh14113No ratings yet
- 4OTALLYDocument28 pages4OTALLYlino_borrotoNo ratings yet
- Dynamixel GuideDocument7 pagesDynamixel GuidemsdoharNo ratings yet
- J OperatorDocument6 pagesJ OperatorManikandan SundararajNo ratings yet
- 3 Bit Synchronous Up CounterDocument15 pages3 Bit Synchronous Up CounterMaruf MorshedNo ratings yet
- SU-Wind Turbines Lecture NotesDocument46 pagesSU-Wind Turbines Lecture NotesMeimanat MahmoudiNo ratings yet
- Community - Arduino Example - RGB LEDDocument3 pagesCommunity - Arduino Example - RGB LEDM Kristina AptNo ratings yet
- Lab 8-Impulse and MomentumDocument6 pagesLab 8-Impulse and MomentumlilcommishNo ratings yet
- Solving Systems of Equations: MATH 15-1 Linear Algebra Week 2Document53 pagesSolving Systems of Equations: MATH 15-1 Linear Algebra Week 2DK DMNo ratings yet
- 35 - 33 Line AddressingDocument3 pages35 - 33 Line AddressingJulio Alberto Paz CorderoNo ratings yet
- The Physics of Suspensions Using Computer SimulationDocument7 pagesThe Physics of Suspensions Using Computer SimulationEric TendianNo ratings yet
- CHPT 1Document47 pagesCHPT 1Herb Johnson100% (1)
- Everything About GateDocument44 pagesEverything About GatetigersayoojNo ratings yet
- 02 KinematicsDocument17 pages02 KinematicsRonelle MaglayoNo ratings yet
- Evolution of ComputerDocument10 pagesEvolution of ComputerScribd ReaderNo ratings yet
- ME352A - Lab 1: Make The Following Mechanisms Using The Kit ProvidedDocument2 pagesME352A - Lab 1: Make The Following Mechanisms Using The Kit ProvidedMukul Chandra100% (1)
- Line Controlled RobotDocument27 pagesLine Controlled RobotchaitanyaNo ratings yet
- Engineering in SocietyDocument44 pagesEngineering in SocietyBella AlmillateguiNo ratings yet
- Lect 1Document19 pagesLect 1Kong DuiDuiNo ratings yet
- EGR 140 Summer 2012 Midterm Review PDFDocument45 pagesEGR 140 Summer 2012 Midterm Review PDFAngel LintonNo ratings yet
- Mechanical Written TestDocument5 pagesMechanical Written Testachyutha_krishnaNo ratings yet
- Curvilinear Motion PDFDocument49 pagesCurvilinear Motion PDFDaniel Naoe FestinNo ratings yet
- Chapter 1 Part1Document116 pagesChapter 1 Part1G00GLRNo ratings yet
- Dynamics Chapter 12Document26 pagesDynamics Chapter 12Sudarshan KambleNo ratings yet
- Dynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionDocument41 pagesDynamics Lecture2 General Curvilinear Motion - Rectangular Components and Projectile MotionJJ Enzon100% (1)
- 12.2 Rectilinear Kinematics Continuous MotionDocument21 pages12.2 Rectilinear Kinematics Continuous MotionFrancis5801100% (5)
- Lect1 DynamicsDocument28 pagesLect1 Dynamicsأميرول فاروقاNo ratings yet
- Chapter II (Compatibility Mode)Document160 pagesChapter II (Compatibility Mode)Biruk TemesgenNo ratings yet
- Useful ChapterDocument66 pagesUseful ChapterBinod Bhandari0% (1)
- Slide Ch12 Kinematics of ParticlesDocument136 pagesSlide Ch12 Kinematics of ParticlesShahrul ShafiqNo ratings yet
- Kinemat THDocument55 pagesKinemat THvinodwarriorNo ratings yet
- COPs, EERs, and SEERs - Power KnotDocument8 pagesCOPs, EERs, and SEERs - Power KnotDaniel Naoe FestinNo ratings yet
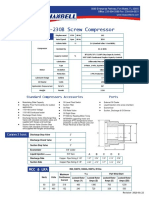
- Hanbell Spec Sheet RC2-230B PDFDocument1 pageHanbell Spec Sheet RC2-230B PDFDaniel Naoe FestinNo ratings yet
- Chap 1 Magnetics ... Energy ConversionDocument36 pagesChap 1 Magnetics ... Energy ConversionDaniel Naoe FestinNo ratings yet
- LAN Keeps Disconnecting and Connecting Constantly Solved - Windows 7 Help ForumsDocument6 pagesLAN Keeps Disconnecting and Connecting Constantly Solved - Windows 7 Help ForumsDaniel Naoe FestinNo ratings yet
- Chapter 1 SetsDocument36 pagesChapter 1 SetsDaniel Naoe FestinNo ratings yet
- Curvilinear Motion PDFDocument49 pagesCurvilinear Motion PDFDaniel Naoe FestinNo ratings yet
- Introduction To ProbabilityDocument10 pagesIntroduction To ProbabilityDaniel Naoe FestinNo ratings yet
- Stress and Time Management For StudentsDocument36 pagesStress and Time Management For StudentsDaniel Naoe FestinNo ratings yet
- Experiment 2Document9 pagesExperiment 2Daniel Naoe Festin100% (1)
- (L7) Molecular GeometryDocument36 pages(L7) Molecular GeometryDaniel Naoe FestinNo ratings yet
- ME112 Week 1Document17 pagesME112 Week 1Daniel Naoe FestinNo ratings yet
- Heat and Heat MeasurementsDocument16 pagesHeat and Heat MeasurementsDaniel Naoe FestinNo ratings yet
- Clean Water ActDocument17 pagesClean Water ActDaniel Naoe FestinNo ratings yet
- Experiment 7: Rockwell Hardness TestDocument11 pagesExperiment 7: Rockwell Hardness TestDaniel Naoe Festin0% (2)
- ME136P Experiment 4Document13 pagesME136P Experiment 4Daniel Naoe FestinNo ratings yet
- ME136P Experiment 5Document15 pagesME136P Experiment 5Daniel Naoe FestinNo ratings yet
- 435W 450W Astrotwins: Enjoy The Energy of The UniverseDocument2 pages435W 450W Astrotwins: Enjoy The Energy of The UniverseMiro MiroNo ratings yet
- Aksa Ajd170Document5 pagesAksa Ajd170mhmmd14No ratings yet
- Astm C97/C97M-09Document3 pagesAstm C97/C97M-09Azuriak150% (2)
- Bituminus Material PDFDocument196 pagesBituminus Material PDFSubramanian BalakrishnanNo ratings yet
- List of IEC StandardsDocument12 pagesList of IEC Standardsaravindeee08100% (1)
- ASM Lab Record BookDocument36 pagesASM Lab Record BookNandan HegdeNo ratings yet
- Transportation ProblemDocument3 pagesTransportation ProblemSalilNo ratings yet
- Contoh Pembentangan Poster Di ConferenceDocument1 pageContoh Pembentangan Poster Di ConferenceIka 1521No ratings yet
- 1 Logic GatesDocument4 pages1 Logic GatesdassonyNo ratings yet
- LSMW To Update Customer Master Records With Standard ObjectDocument9 pagesLSMW To Update Customer Master Records With Standard ObjectShahid_ONNo ratings yet
- Sample Questions Paper 2 - TNQT Digital-4July19Document6 pagesSample Questions Paper 2 - TNQT Digital-4July19Gudimetla KowshikNo ratings yet
- Article On Online ShoppingDocument23 pagesArticle On Online ShoppingsaravmbaNo ratings yet
- Laplace TransformDocument2 pagesLaplace TransformumangNo ratings yet
- Tapchanger Dual Assessment Raka Levi31102011 PDFDocument12 pagesTapchanger Dual Assessment Raka Levi31102011 PDFYuri OmonteNo ratings yet
- Parola A Do ZDocument8 pagesParola A Do ZjovicaradNo ratings yet
- Quiz 3 Basic ProbabilityDocument38 pagesQuiz 3 Basic ProbabilityjacobtianNo ratings yet
- Open Mapping Theorem (Functional Analysis)Document3 pagesOpen Mapping Theorem (Functional Analysis)Silambu SilambarasanNo ratings yet
- NASA Facts Explorer XVI The Micrometeoroid SatelliteDocument4 pagesNASA Facts Explorer XVI The Micrometeoroid SatelliteBob AndrepontNo ratings yet
- How To Find Equilibrium Price and Quantity MathematicallyDocument2 pagesHow To Find Equilibrium Price and Quantity MathematicallyJoshua S Mjinja100% (1)
- RO400FC RO300FC Specifications - V3.2Document6 pagesRO400FC RO300FC Specifications - V3.2bogdantn98No ratings yet
- Potassium in Water by Atomic Absorption Spectrophotometry: Standard Test Method ForDocument4 pagesPotassium in Water by Atomic Absorption Spectrophotometry: Standard Test Method ForhydrogenperoksideNo ratings yet
- Money Calculations (F)Document14 pagesMoney Calculations (F)Pavan GhelaniNo ratings yet
- G3600 A4 Brochures PDFDocument4 pagesG3600 A4 Brochures PDFVictor NunezNo ratings yet
- A Geometry Surveying Model and Instrument of A Scraper Conveyor in Unmanned Longwall Mining FacesDocument9 pagesA Geometry Surveying Model and Instrument of A Scraper Conveyor in Unmanned Longwall Mining FacesEviNo ratings yet
- Cooling Unit SpecDocument4 pagesCooling Unit Specmirali74No ratings yet
- Chapter 1 - Distillation PDFDocument107 pagesChapter 1 - Distillation PDFFatin Natasha NazriNo ratings yet
- Change ManDocument17 pagesChange Mansrikanth9gannuNo ratings yet
- Speech Enhancement Using Minimum Mean-Square Error Short-Time Spectral Amplitude EstimatorDocument13 pagesSpeech Enhancement Using Minimum Mean-Square Error Short-Time Spectral Amplitude EstimatorwittyofficerNo ratings yet
- TCL CommandsDocument52 pagesTCL Commandssurya_gaddeNo ratings yet
- Hard Disk Drive Specification HGST Travelstar Z7K500Document173 pagesHard Disk Drive Specification HGST Travelstar Z7K500OmegalexNo ratings yet