You might also like
- A Quick Introduction To NeuralDocument10 pagesA Quick Introduction To Neurallizhi0007No ratings yet
- The Hough TransformDocument3 pagesThe Hough Transformlizhi0007No ratings yet
- Circle Hough TransformDocument5 pagesCircle Hough Transformlizhi0007100% (1)
- SVM Tutorial Part2Document20 pagesSVM Tutorial Part2lizhi0007No ratings yet
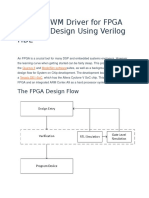
- PWM Driver VerilogDocument24 pagesPWM Driver Veriloglizhi0007No ratings yet
- Svmtrain MDocument10 pagesSvmtrain Mlizhi0007No ratings yet
- Convolutional Neural NetworksDocument21 pagesConvolutional Neural Networkslizhi0007No ratings yet
- SVM Tutorial Part3Document18 pagesSVM Tutorial Part3lizhi0007No ratings yet
- HistogramDocument5 pagesHistogramlizhi0007No ratings yet
- Closed Loop Speed and Position Control of DC MotorsDocument7 pagesClosed Loop Speed and Position Control of DC Motorslizhi0007No ratings yet
- Advanced PID Controller ImplementationDocument13 pagesAdvanced PID Controller Implementationlizhi0007100% (1)
- JPEG Image Compression Implemented in Matlab: by Michael ChristensenDocument6 pagesJPEG Image Compression Implemented in Matlab: by Michael ChristensenChandan KumarNo ratings yet
- Simple DFT in OpencvDocument13 pagesSimple DFT in Opencvlizhi0007100% (2)
- SVM Tutorial Part1Document9 pagesSVM Tutorial Part1lizhi0007No ratings yet
- Control A DC Motor With An ArduinoDocument5 pagesControl A DC Motor With An Arduinolizhi0007No ratings yet
- Basic Structures OpenCVDocument68 pagesBasic Structures OpenCVlizhi0007100% (1)
- Set real-time clock with DS1307Document14 pagesSet real-time clock with DS1307lizhi0007No ratings yet
- 4.3 The Non-Inverting AmplifierDocument5 pages4.3 The Non-Inverting Amplifierlizhi0007No ratings yet
- Opencv Tutorials 2.4.3Document409 pagesOpencv Tutorials 2.4.3Nindo Harun PrabantaraNo ratings yet
- Read & Display ImageDocument18 pagesRead & Display Imagelizhi0007100% (1)
- 3.3 FET AmplifierDocument5 pages3.3 FET Amplifierlizhi0007100% (1)
- Histogram Calculation - OpenCV 3.0Document7 pagesHistogram Calculation - OpenCV 3.0lizhi0007100% (2)
- Detecting Arrow KeysDocument3 pagesDetecting Arrow Keyslizhi0007No ratings yet
- How To Install The Latest Eclipse Release in Ubuntu 14Document4 pagesHow To Install The Latest Eclipse Release in Ubuntu 14lizhi0007No ratings yet
- Histogram Equalization of Grayscale or Color ImageDocument6 pagesHistogram Equalization of Grayscale or Color Imagelizhi0007100% (1)
- 4.1 Opamps Introduction The Ideal AmplifierDocument2 pages4.1 Opamps Introduction The Ideal Amplifierlizhi0007No ratings yet
- 4.2 The Inverting AmplifierDocument6 pages4.2 The Inverting Amplifierlizhi0007No ratings yet
- Writing Task 2 Band 8 - 9Document23 pagesWriting Task 2 Band 8 - 9Emad MerganNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Create Login Application In Excel Macro Using Visual BasicDocument16 pagesCreate Login Application In Excel Macro Using Visual Basicfranklaer-2No ratings yet
- A320 Flex CalculationDocument10 pagesA320 Flex CalculationMansour TaoualiNo ratings yet
- Universal Chargers and GaugesDocument2 pagesUniversal Chargers and GaugesFaizal JamalNo ratings yet
- Report CategoryWiseSECCVerification 315700301009 08 2019Document2 pagesReport CategoryWiseSECCVerification 315700301009 08 2019Sandeep ChauhanNo ratings yet
- IRCTC Next Generation Eticketing SystemDocument4 pagesIRCTC Next Generation Eticketing Systemsivagokul526No ratings yet
- Case StudyDocument5 pagesCase StudyTanzila khanNo ratings yet
- Work Instruction For Coil Taping Process of EE14 (1&4 Pin)Document6 pagesWork Instruction For Coil Taping Process of EE14 (1&4 Pin)k.mehaboob bashaNo ratings yet
- Phil of DepressDocument11 pagesPhil of DepressPriyo DjatmikoNo ratings yet
- Fta-500 A (03-20-08) PDFDocument8 pagesFta-500 A (03-20-08) PDFOrlando Vazquez PuertaNo ratings yet
- Katsina Polytechnic Lecture Notes on History and Philosophy of Science, Technology and MathematicsDocument33 pagesKatsina Polytechnic Lecture Notes on History and Philosophy of Science, Technology and MathematicsHamisu TafashiyaNo ratings yet
- ResumeDocument4 pagesResumeBazlaa HasmanNo ratings yet
- In The Shadow of The CathedralDocument342 pagesIn The Shadow of The CathedralJoy MenezesNo ratings yet
- Specification of PCB800099 Controller Board V1.0Document10 pagesSpecification of PCB800099 Controller Board V1.0benabdullahNo ratings yet
- 桌球比賽裁判自動系統Document69 pages桌球比賽裁判自動系統ErikNo ratings yet
- 6.1 Calculation of Deflection: 1) Short Term Deflection at Transfer 2) Long Term Deflection Under Service LoadsDocument7 pages6.1 Calculation of Deflection: 1) Short Term Deflection at Transfer 2) Long Term Deflection Under Service LoadsAllyson DulfoNo ratings yet
- Management Science BUMA 20103 Module New PDFDocument290 pagesManagement Science BUMA 20103 Module New PDFLee TeukNo ratings yet
- Public Dealing With UrduDocument5 pagesPublic Dealing With UrduTariq Ghayyur86% (7)
- Ichiban Ushiro No Daimaou Act 7Document161 pagesIchiban Ushiro No Daimaou Act 7Haif Al HajrafNo ratings yet
- Noritz N-063 Installation ManualDocument66 pagesNoritz N-063 Installation ManualbondsupplyNo ratings yet
- Presostatos KPI 1Document10 pagesPresostatos KPI 1Gamaliel QuiñonesNo ratings yet
- Grade-3-DLL MATHEMATICS-3 Q1 W4Document3 pagesGrade-3-DLL MATHEMATICS-3 Q1 W4Jonathan Corveau IgayaNo ratings yet
- High Current Transistor SpecsDocument5 pagesHigh Current Transistor SpecsamernasserNo ratings yet
- Student Graduation Using DataMiningDocument207 pagesStudent Graduation Using DataMiningDanielNo ratings yet
- Friction WedgesDocument7 pagesFriction Wedgespericharla ravivarmaNo ratings yet
- Process Strategy PPT at BEC DOMSDocument68 pagesProcess Strategy PPT at BEC DOMSBabasab Patil (Karrisatte)100% (1)
- Activities For Responding To Reading in Year 2Document59 pagesActivities For Responding To Reading in Year 2lancashireliteracy100% (1)
- Ref ModulesDocument148 pagesRef ModuleshoneyNo ratings yet
- Organizational Development and EvaluationDocument22 pagesOrganizational Development and EvaluationFransisca RosalinNo ratings yet
- EEG Signal Classification Using K-Means and Fuzzy C Means Clustering MethodsDocument5 pagesEEG Signal Classification Using K-Means and Fuzzy C Means Clustering MethodsIJSTENo ratings yet
- Paper 2Document17 pagesPaper 2Khushil100% (1)